
近年来,ADAS市场增长迅速,这类系统已经从高端市场扩展到中端市场,并且在入门级乘用车领域也变得更加常见,一个性能良好的ADAS系统离不开ADAS系统标定工程师多次反复的测试验证,下面将分别通过横纵向两大块功能来介绍ADAS系统的主要标定验证过程。
纵向功能主要介绍自适应巡航ACC以及自动紧急制动功能AEB两大部分,横向功能主要介绍车道偏离预警LDW,车道偏离辅助LKA,车道居中保持LCK,以及换道功能四大部分,下面将详细介绍这些功能的具体标定验证场景。
1.自适应巡航ACC性能评价标准介绍
自适应巡航ACC功能主要分为定速控制,跟随控制,弯道速度控制三大部分。
(1)定速控制的稳定性
定速控制的性能评价标准主要通过不同速度下直道与15%以下坡道(包含上坡与下坡)来评判,直道的评价标准应为速度达到稳定时,当前的表显车速与驾驶员设定的车速误差应小于等于1km/h,坡道的评价标准应为速度达到稳定时,当前的表显车速与驾驶员设定的车速误差应小于等于2km/h。
(2)跟随控制的稳定性
怠速跟随(10km/h以下)
评价标准:无频繁的EC/DC切换,距离速度控制稳定,无自车制动到停现象。
不同速度下远距离接近静止目标
评价标准:目标识别的及时性(应大于100m及时识别),最大支持刹停速度门限应不低于100km/h,减速平稳,减速度与减速度变化率应满足I-VISTA法规要求,刹停距离控制稳定(2-4m)。
不同速度下的目标跟随
评价标准:稳定跟车后,自车的实际速度与前车的速度误差应小等于1km/h,实际的跟车距离与期望的跟车间距误差应小等于2m,车速与转速不能有明显的变化,EC/DC不能频繁切换。
高速接近低速目标,前车缓刹(减速度-2/-3m/s2),前车急刹(减速度-4/-5m/s2)
评价标准:减速平稳,减速度及减速度变化率应满足I-VISTA法规要求。
稳定跟车过程中驾驶员override
评价标准:开始override时,整车加速过程中无加速冲击,退出override后控制减速及时,DC切EC平顺。
(3)弯道控制的稳定性
评价标准:驾驶员以不同的速度过大弯道(250-1000m),小弯道(100-250m),匝道(小于100m)场景时,纵向应能及时把速度降到一个合适的数值,使驾驶员开ADAS功能过该弯道时不会产生恐慌感,减速过程中,减速度应平稳的下降,不能出现急刹或DC/EC频繁切换的现象。
(4)跟停起步控制的稳定性
不同速度,不同timegap,前车不同减速度下的平道,坡道跟停
评价标准:跟停过程中,减速时机合适,无明显恐慌感,减速平稳,跟停距离为2-4m,跟停过程中无目标丢失及跳变问题,跟停后无溜车现象,整车无明显抖动,转速无明显上升。
平道,坡道起步
评价标准:前车起步时,自车在1s内完成起步,起步平顺,无转速激增,无二次加速或者起步冲击等现象,坡道起步时无溜坡现象。
(5)切入切出控制的稳定性
自车远近距离的切入切出有目标的车道
评价标准:自车浸入目标车道四分之一个车身时能够快速识别到目标车道前方的目标,减速度应平稳。切出有目标的自车车道时,在自车中心线越过切出测车道线时能够迅速释放目标,切出后加速平稳,无明显换道冲击现象。
目标远近距离的切入切出自车车道
评价标准:目标浸入自车车道四分之一个车身时能够快速识别到目标,并平稳的减速。目标中心线越过切出测车道线时能够迅速释放目标,切出后自车加速平稳,无明显换道冲击现象。
2.自动紧急制动AEB性能评价标准介绍
AEB的性能测试主要是为了满足C-NCAP,主要的测试场景有AEB-C2c,AEB-Ped,AEB-Cyc。
(1)AEB-C2c
AEB-C2C场景主要包括CCRS(前车静止),CCRM(前车运动),CCRB(前车制动)三大场景。
CCRS场景

CCRS场景对AEB的要求为自车车速从10-60km/h,接近前方静止目标,分别测试目标与自车的重叠度为-50%~+50%的场景,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
CCRS场景对FCW的要求为自车车速从30-80km/h,接近前方静止目标,分别测试目标与自车的重叠度为-50%~+50%的场景,要求FCW功能能够正常触发,TTC≥2.1s(中等灵敏度)。
CCRM场景

CCRM场景对AEB的要求为自车车速从30-80km/h,接近前方20km/h的目标,分别测试目标与自车的重叠度为-50%~+50%的场景,要求能够完全避免碰撞,制动过程平顺(无二次制动),车辆不能制动到停。
CCRM场景对FCW的要求为自车车速从50-80km/h,接近前方20km/h的目标,分别测试目标与自车的重叠度为-50%~+50%的场景,要求功能能够正常触发,TTC≥2.1s(中等灵敏度)。
CCRB场景
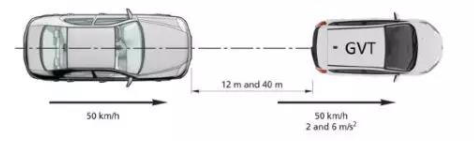
CCRB场景要求自车与前车车速均为50km/h,分别测试在距离12m和40m时,前车分别以-2和-6m/s2的减速度刹停,要求前车需要在1s内达到期望减速度,且误差不超过±0.25 m/s2,要求自车能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
(2)AEB-Ped
AEB对行人的控制主要分为横穿场景,鬼探头场景,纵向场景三大部分。
横穿场景
近端25%,75%场景测试:
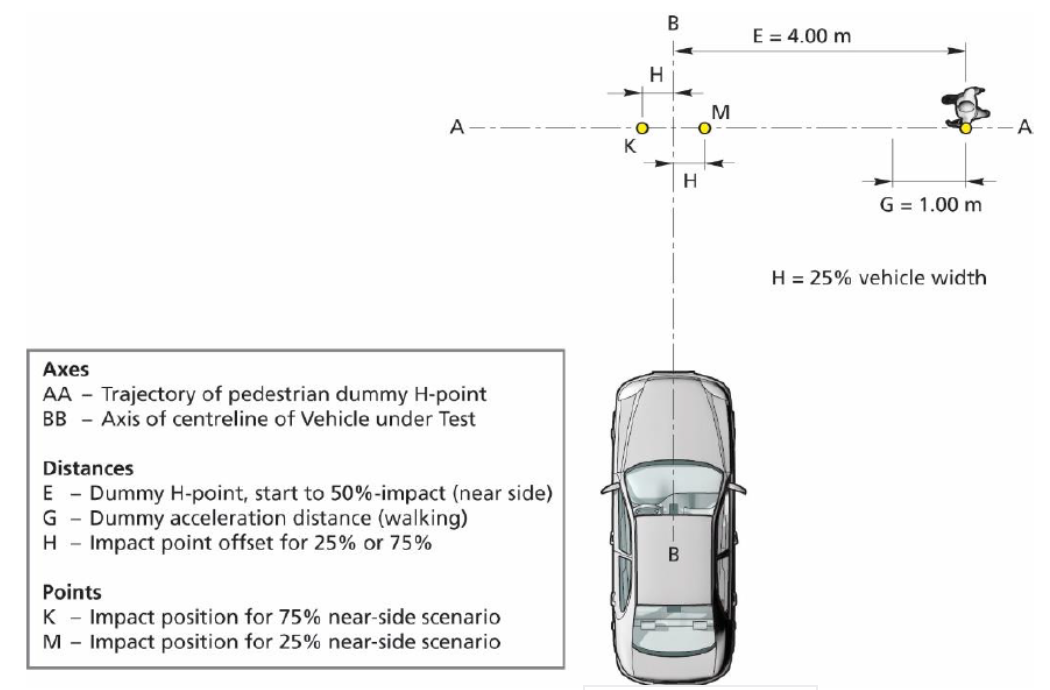
要求自车分别以10-60km/h在白天/夜间场景下,目标行人从距车辆中心4m处开始加速,经过1m加速至5km/h,分别测试行人与自车重叠率25%,75%的场景,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
远端50%场景测试:
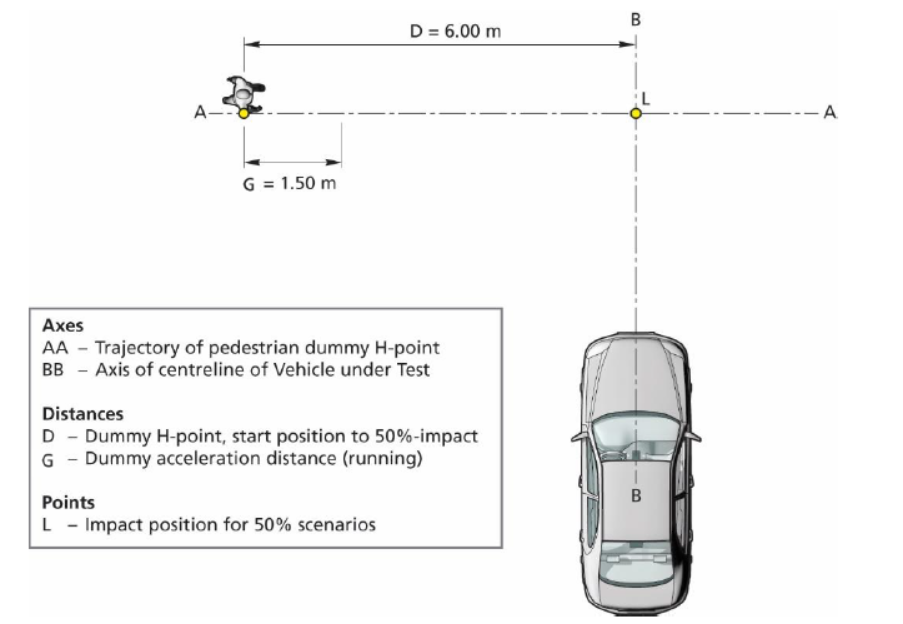
要求自车分别以10-60km/h在白天场景下,目标行人从距车辆中心6m处开始加速,经过1.5m加速至8km/h,测试行人与自车重叠率50%的场景,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
鬼探头场景
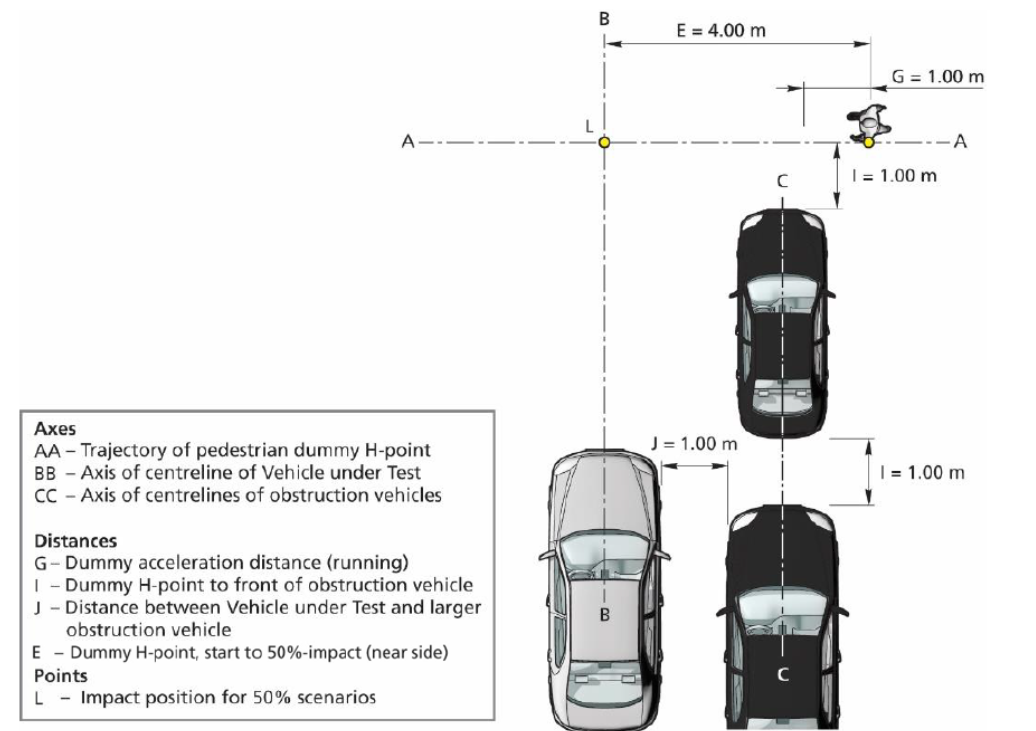
要求白天状态下(夜晚要有路灯且开启近光灯),目标儿童从前方障碍物后面距车辆中心4m处开始加速,经过1m加速至5km/h,此时车辆以速度10-60km/h[步长为5km/h]速度行驶,与行人在50%处发生碰撞,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
纵向场景
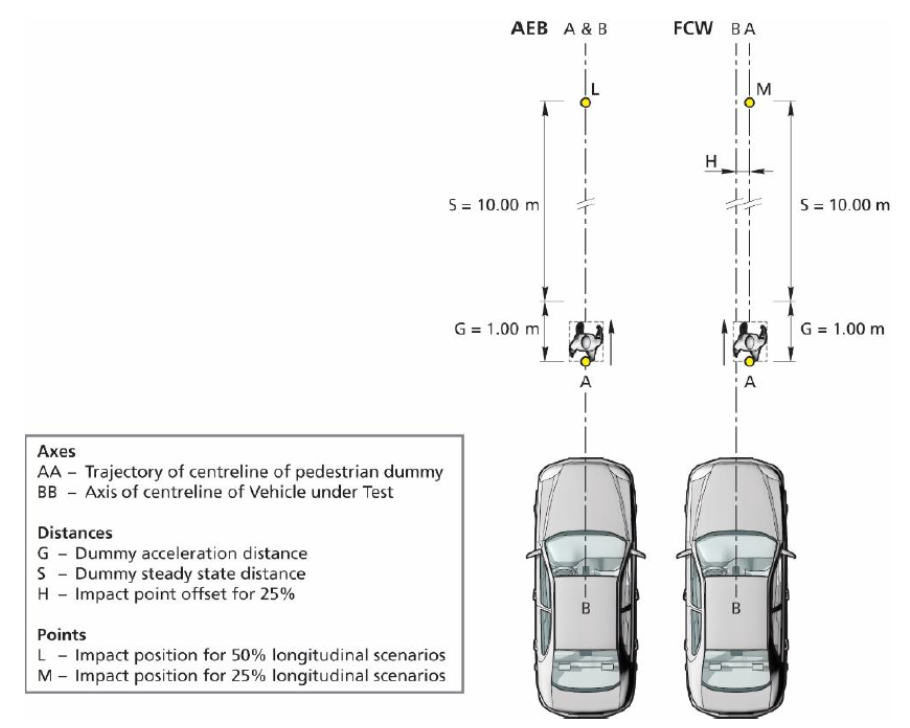
要求白天状态下(夜晚要无路灯且开启远光灯),车辆前方有目标行人以相同方向行走,行人经过1m加速至5km/h,之后再行走10m后,此时车辆以速度20-60km/h[步长为5km/h]速度行驶靠近,与行人在50%处发生碰撞,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
要求白天状态下(夜晚要无路灯且开启远光灯),车辆前方有目标行人以相同方向行走,行人经过1m加速至5km/h,之后再行走10m后,此时车辆以速度50-80km/h[步长为5km/h]速度行驶靠近,与行人在25%处发生碰撞,要求功能能够正常触发,TTC≥2.1s(中等灵敏度)。
(3)AEB-Cyc
横穿场景
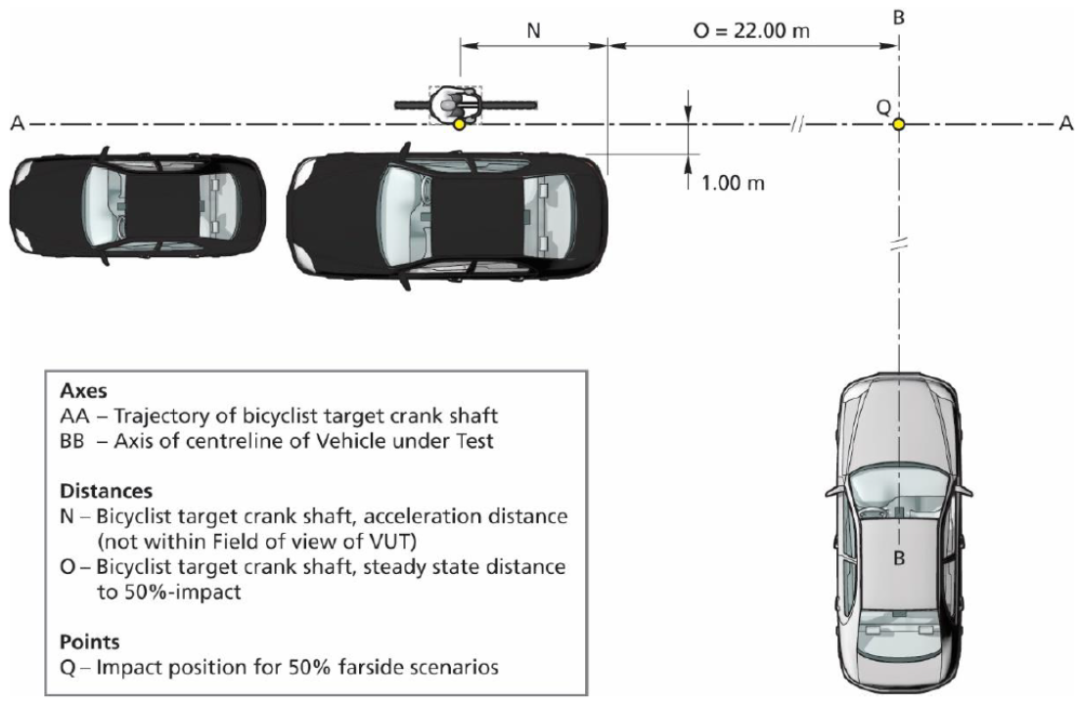
要求白天状态下,车辆以10-60km/h速度行驶[步长为5km/h],此时前方盲区内存在骑行者,通过距离N加速至20km/h出现在车辆视角内,在行驶22m后,与车辆在50%处发生碰撞,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
近端50%场景测试:
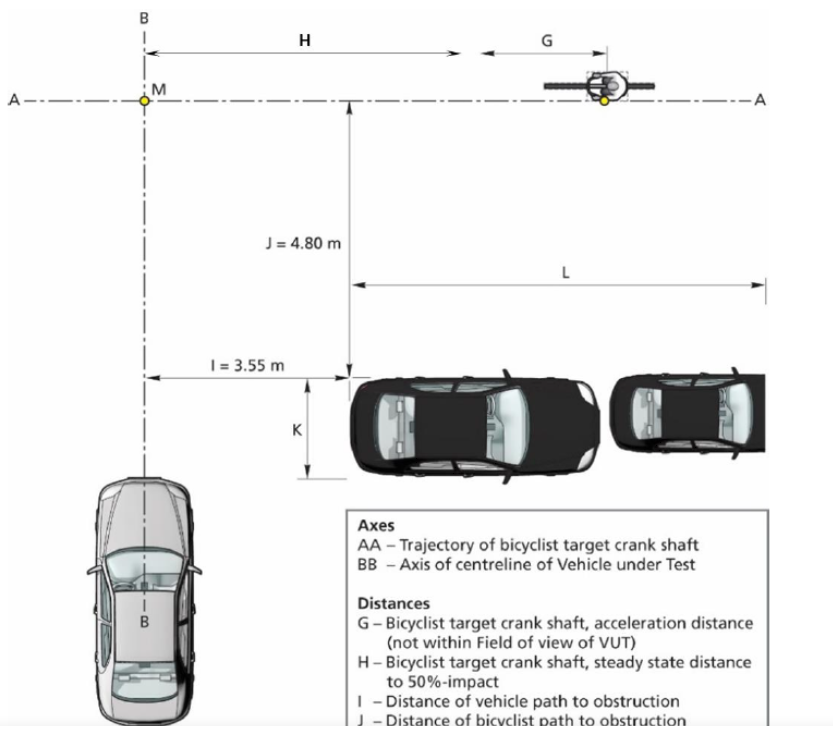
要求白天状态下,车辆以10-60km/h速度行驶[步长为5km/h],此时前方盲区内存在骑行者,通过距离G加速至10km/h出现在车辆视角内,在行驶H后,与车辆在50%处发生碰撞,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
纵向场景
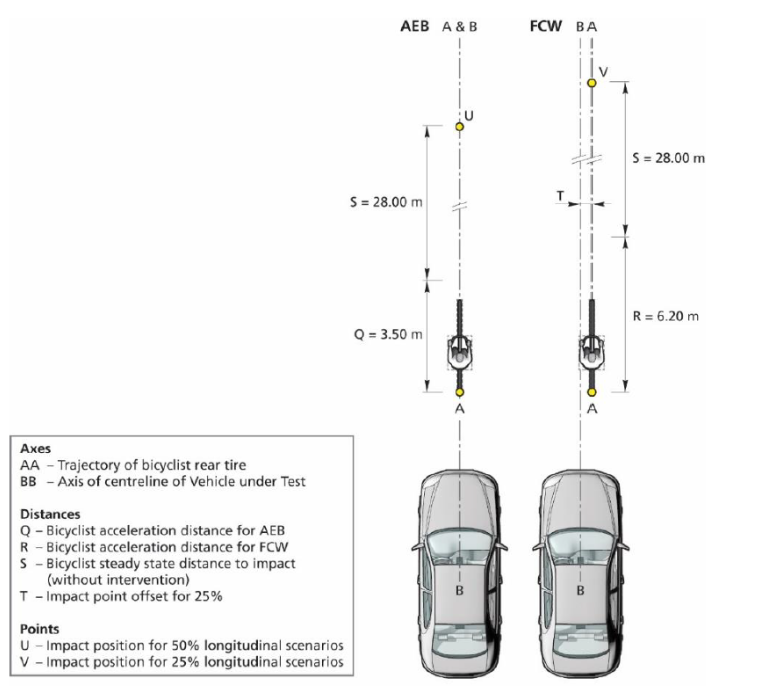
要求白天状态下,车辆以25-60km/h速度行驶[步长为5km/h],此时前方存在骑行者,通过距离3.5m加速至15km/h,在行驶28m后,与车辆在50%处发生碰撞,要求能够完全避免碰撞,制动过程平顺(无二次制动),刹停距离1.5±0.5m。
纵向场景对FCW的要求:
要求白天状态下,车辆以50-80km/h速度行驶[步长为5km/h],此时前方存在骑行者,通过距离6.2m加速至20km/h,在行驶28m后,与车辆在25%处发生碰撞,要求功能能够正常触发,TTC≥2.1s(中等灵敏度)。
3.横向性能评价标准介绍
横向性能主要从LDW报警的稳定性,LKA控制的稳定性,LCK/LBS控制的稳定性,换道控制的稳定性,ELK控制的稳定性几大方面介绍。
(1)LDW报警的稳定性
需要分别以0.2m/s~0.5m/s的横向速度,分别测试直道与弯道场景,要求报警及时连续,报警时车轮未越过车道线。
(2)LKA控制稳定性
需要分别以0.1m/s~0.8m/s的横向速度,分别测试直道与弯道场景,要求功能介入平顺,不存在卡顿,车辆未偏出车道,功能退出时车辆在车道中心附近。
(3)LCK控制稳定性
直道场景
需要分别测试30-120km/h下的直道场景,要求控制平稳,方向盘无高频抖动问题,无明显画龙问题,自车轴线与车道中心线的横向间距保持在±0.1m 之内。
弯道场景
需要分别测试不同速度下在半径40-5000m的弯道场景,进弯和出弯过程中车辆不能有明显偏离车道中心线的现象,整个弯道过程中车辆控制平稳,无明显画龙问题,整个弯道过程中方向盘无高频抖动问题,整个弯道过程中横向加速度≤2m/s2,整个弯道过程中车辆自车轴线与车道中心线的横向间距保持在±0.2m之内。
车道多变少,少变多场景
比如车道突然从三车道变为两车道,或者从两车道变为三车道的场景下,整个过程横向控制平稳,无明显画龙,无大幅摆动、无高频抖动、无横向控制退出等问题。
tja跟车与跟线切换
要求车道线控制和tja控制切换过程中横向控制平稳,无大幅摆动,无明显画龙、无横向控制退出等问题。
通过路口能力-人行横道、十字路口、高速汇入口、匝道分叉口
要求能够正常通过路口,过程中横向控制平稳,无明显画龙,无大幅摆动、无高频抖动、无横向控制退出等问题
特殊场景-市区待转线、高速干扰线、鱼骨线、隧道、应急停车带、超窄或超宽车道、龙门架拍照灯(夜间)
要求车辆通过特殊场景时,横向控制平稳,方向盘无高频抖动、无大幅摆动、无横向控制退出问题
(4)LC控制的稳定性
拨杆换道
不同速度、不同灵敏度下,在直道,弯道下拨杆换道,要求转向灯开启后1s内触发换道动作,换道过程控制平顺,无明显突兀或机械感,无超调,无高频抖动或大幅摆动问题,车辆在需求时间内完成换道且换道完成后车辆维持在车道中心行驶。
压速换道
不同速度、不同灵敏度下,在直道,弯道下触发压速换道,要求压速条件满足1.5s后内触发换道动作,换道过程控制平顺,无明显突兀或机械感,无超调,无高频抖动或大幅摆动问题,车辆在需求时间内完成换道且换道完成后车辆维持在车道中心行驶。
换道取消
换道取消工况主要分为驾驶员主动关闭转向灯取消换道,换道车道有目标侵入取消换道,车道线由虚线突然变为实线时取消换道,车道线消亡取消换道,触发取消换道的条件时,要求车辆如果没有越过目标车道的车道线时,立即终止变道,拉回本车道,如果越过目标车道的车道线时,持续完成换道动作,在此过程中不论拉回还是持续换道,要求过程控制平缓,无明显突兀或机械感,无超调,无高频抖动或大幅摆动。
(5)LBS控制的稳定性
LBS为大车智慧避让功能,要求在避让过程中横向偏移量控制在40cm±5cm范围内,功能介入和退出时机合理,无频繁介入或退出问题。
(6)ELK控制的稳定性
ELK对车道线,道路边界的控制
要求不同横向速度的直道,弯道场景,要求车辆不能偏出车道,功能介入平顺,无卡顿及超调,退出时车辆维持在车道中心。
ELK-OnComing场景
要求以不同的横向速度针对OnComing的目标触发ELK功能,要求车辆不能偏出车道,功能介入平顺,无卡顿及超调,退出时车辆维持在车道中心。
ELK-OverTaking场景
要求以不同的横向速度针对OverTaking的目标触发ELK功能,要求车辆不能偏出车道,功能介入平顺,无卡顿及超调,退出时车辆维持在车道中心。
文章转载自公众号:智驾人在路上
作者:Yang00168
原文链接:https://mp.weixin.qq.com/s/fEH7nRuN9uCIr8T7Ffgf5w

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)