
目前,越来越多的激光雷达厂家在最新的产品设计中应用SPAD-SoC。
做个不太恰当的比喻,这颗SPAD-SoC在激光雷达中的重要性,相当于“CPU+显卡+内存”对于一台电脑的重要性。
01
SPAD单体的基本原理
1. 基本定义
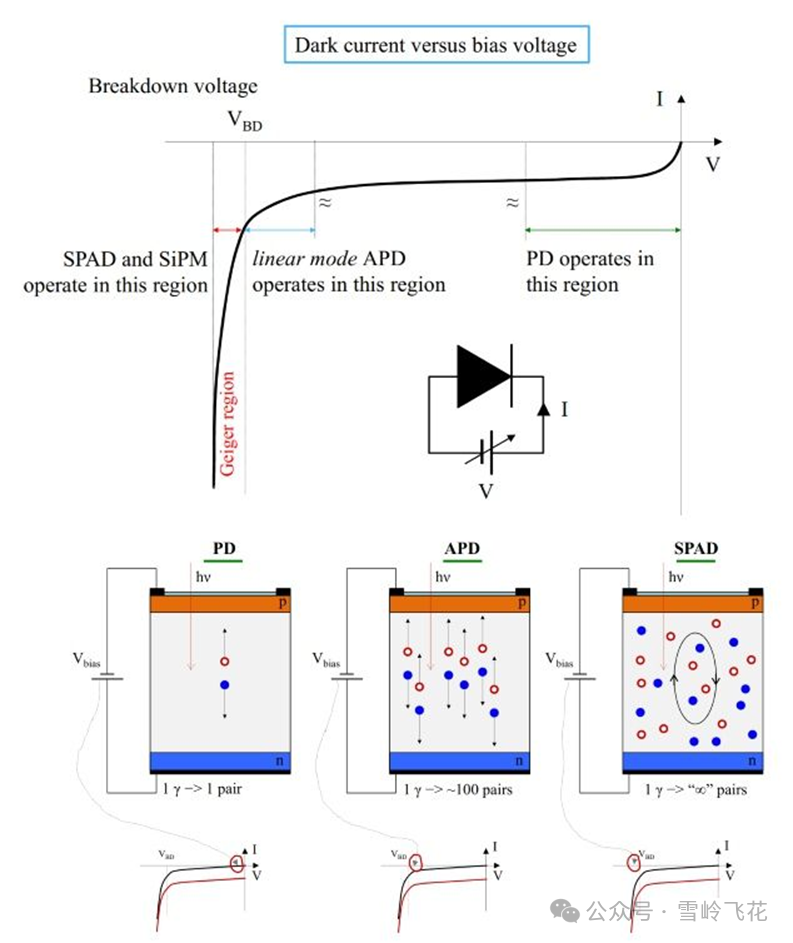
SPAD(Single Photon Avalanche Diode)是单个工作在盖革模式下的APD,SPAD的增益远高于APD和PD。
图片来源:阜时科技
2. 发展历史
SPAD的发展历史如下:
20世纪80年代,SPAD在实验室和科研机构中进行研究,在整个20世纪,SPAD以单个器件研究为主,没有能够进行大规模阵列化的制备;
2003年,CMOS工艺集成的SPAD器件首次出现,开始进入医疗、航天领域;
2005年以后,阵列化SPAD器件出现,如8x4和32x32的小型阵列;
2020年,苹果发布Lidar产品,激光雷达厂商宣布采用SPAD进行新产品的研发,大规模商用SPAD阵列开始流行;
2023年,Sony量产了全球首个车载大面阵SPAD芯片IMX459,SPAD像素尺寸10.08*10.08um,含有11万个SPAD像素(189/H x 600/V)。
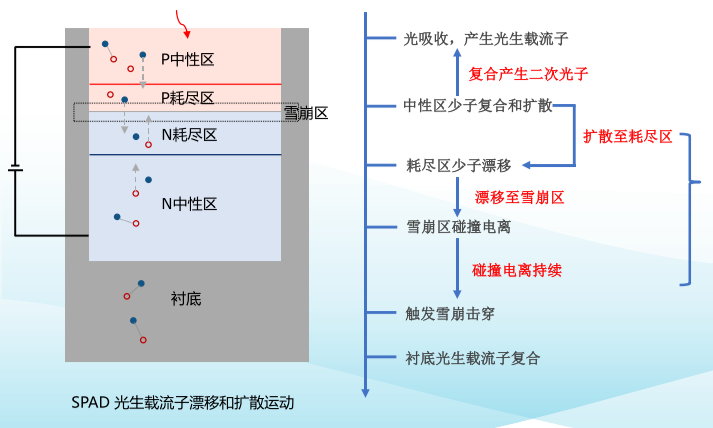
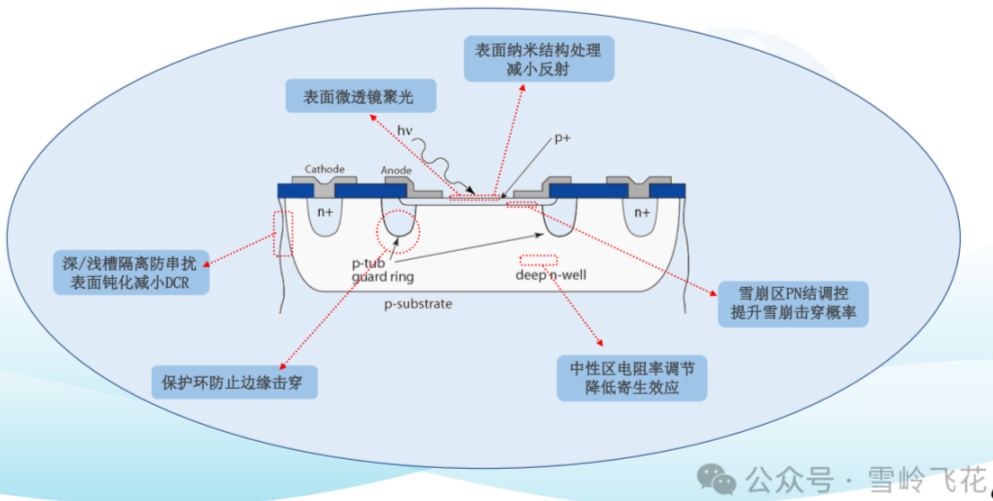
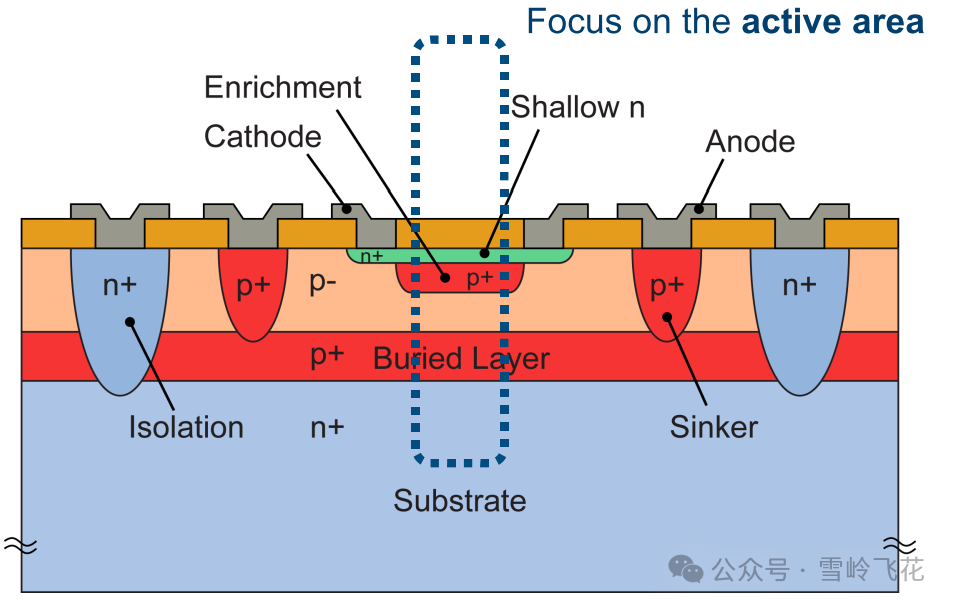
3. 结构和工作模式
SPAD单体的结构如下:
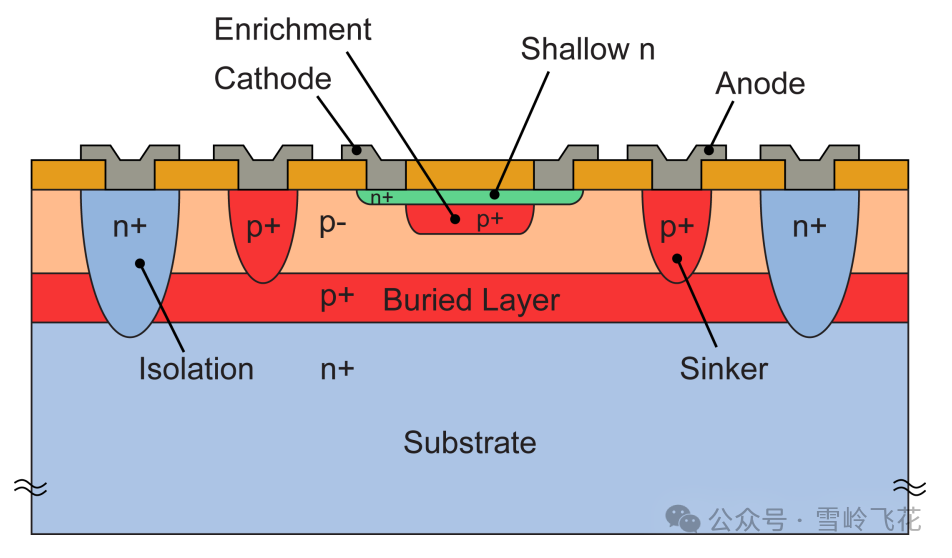
图片来源:ISSW2024,Gulinatti (Politecnico di Milano)
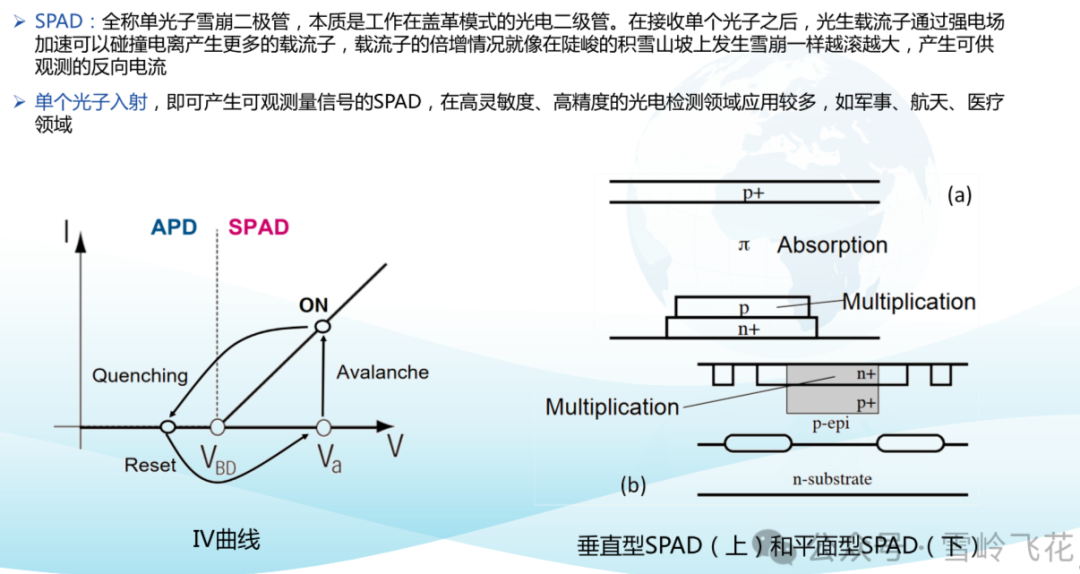
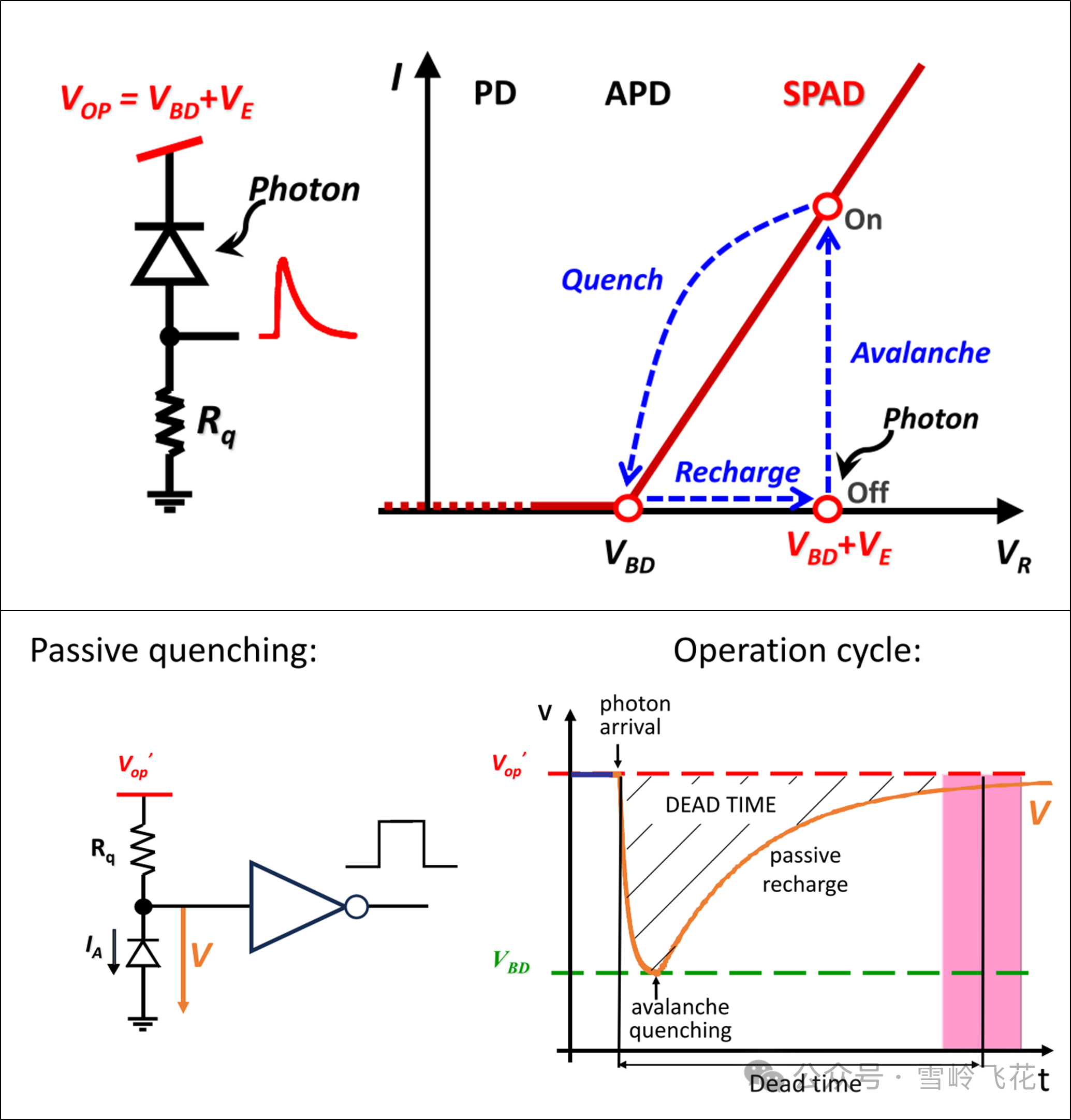
SPAD的工作模式:
工作电压>击穿电压,光子入射,触发雪崩,开始探测,产生一个可以被TDC捕捉的数字信号。
淬火,使得工作电压
复位,将工作电压拉回到大于击穿电压状态,重复步骤1。
SPAD通过猝灭状态恢复到原来偏置状态,输出信号的幅度不与入射光子数成正比。
图片来源:阜时科技
02
SPAD-SoC原理和集成方案
1. 系统原理
SPAD-SoC芯片将SPAD阵列(包含了十几万~数百万的SPAD单体)、TDC、时间门控电路集成集成在一起,实现“光转电”、“电转数”和“数据处理”。
APD、SiPM和SPAD-SoC面阵的架构差异:
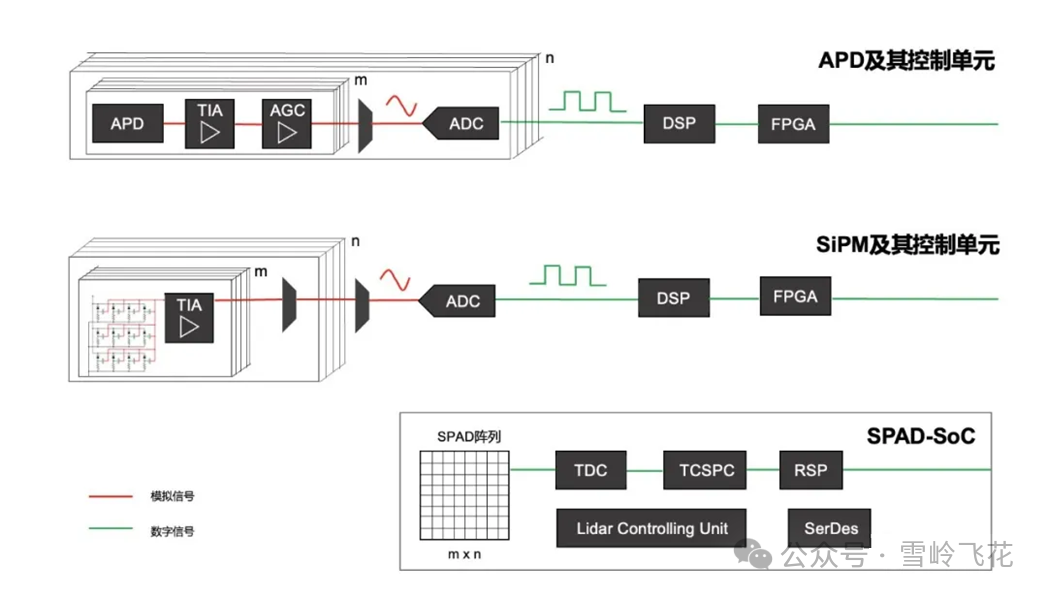
图片来源:九章智驾
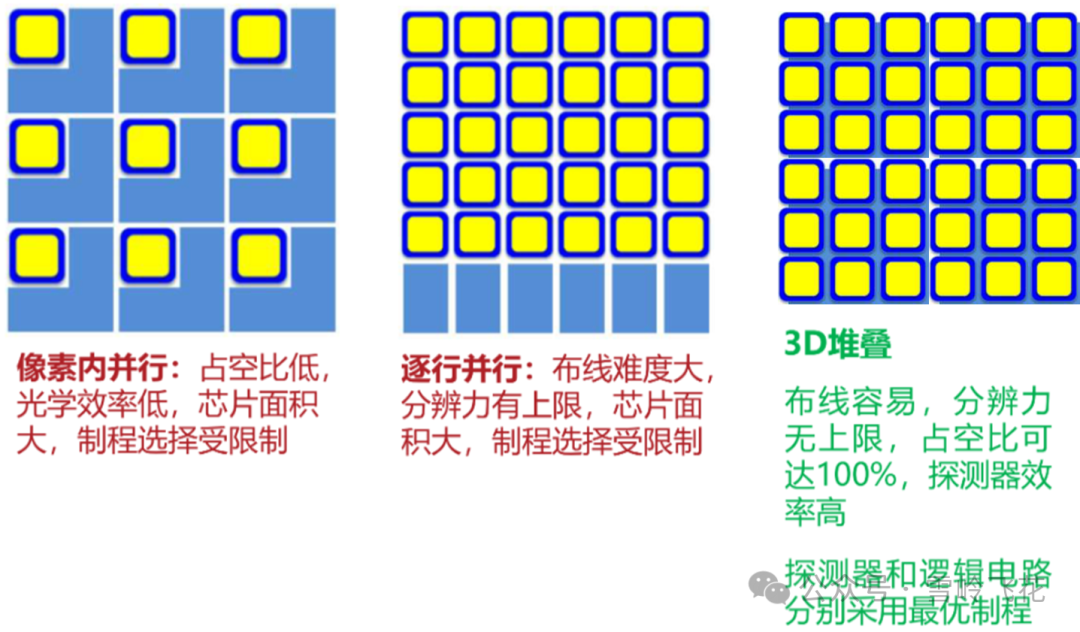
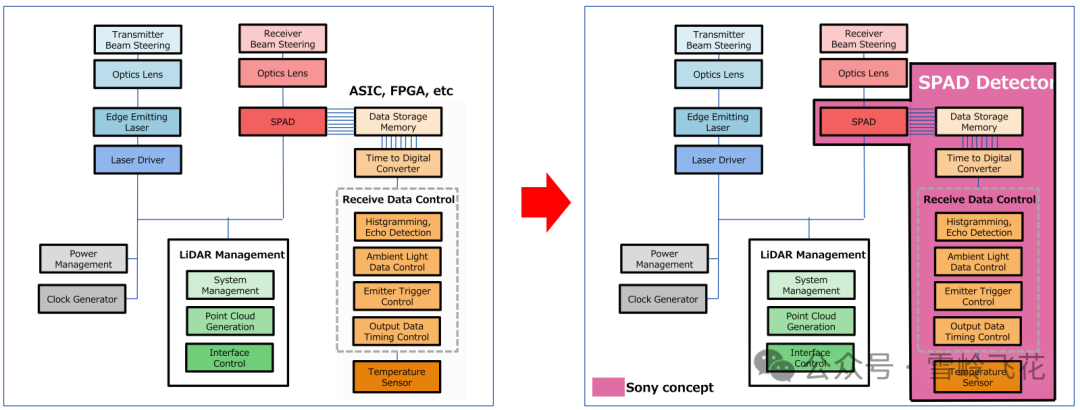
2. 架构方案
图片来源:阜时科技
图片参考:灵明光子
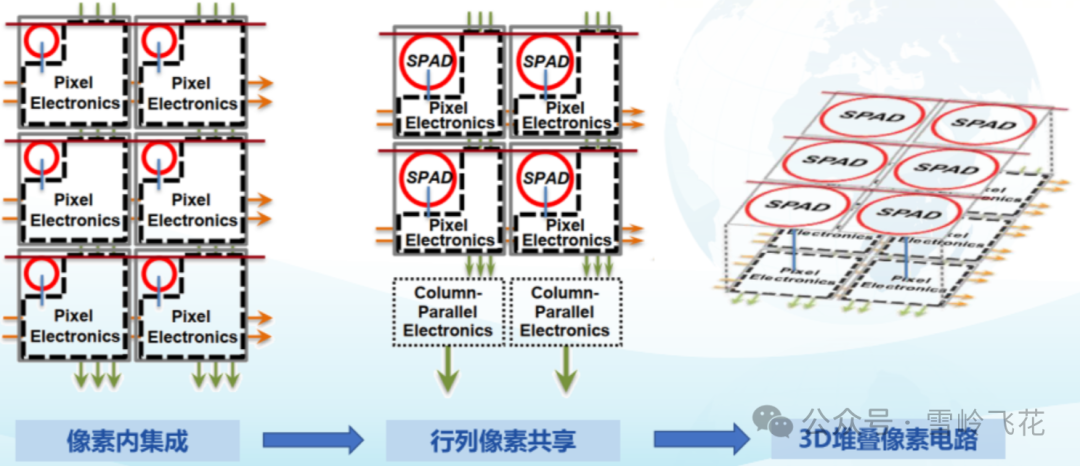
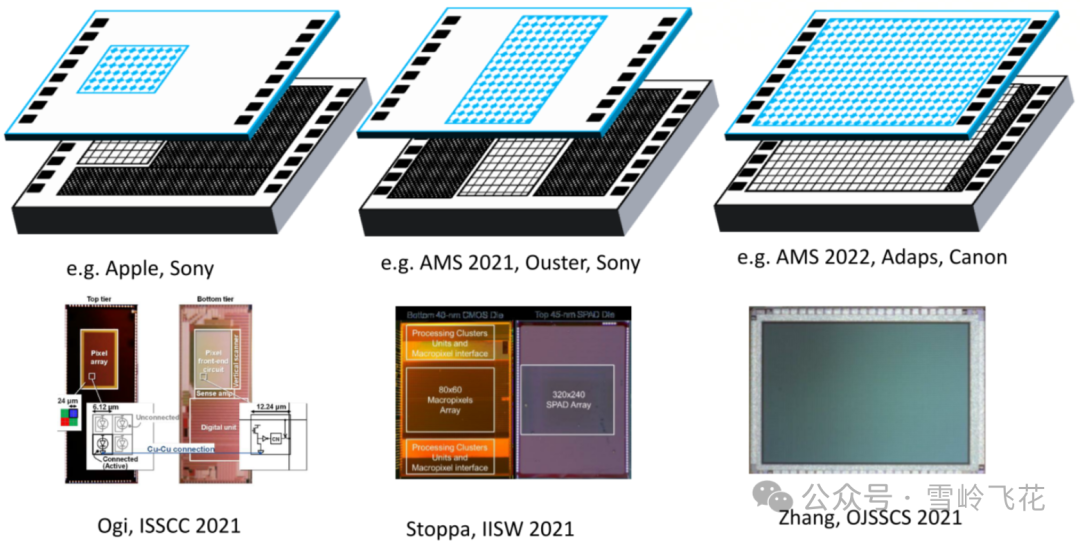
不过实际应用中,SPAD与处理电路集成的组合方式可能更为多样:
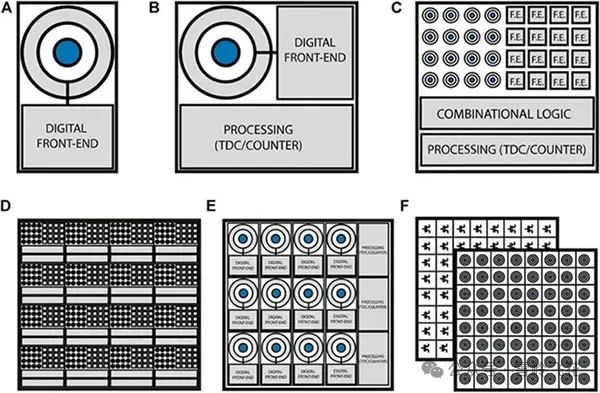
图片来源:DOI: 10.3389/fphy.2022.906671
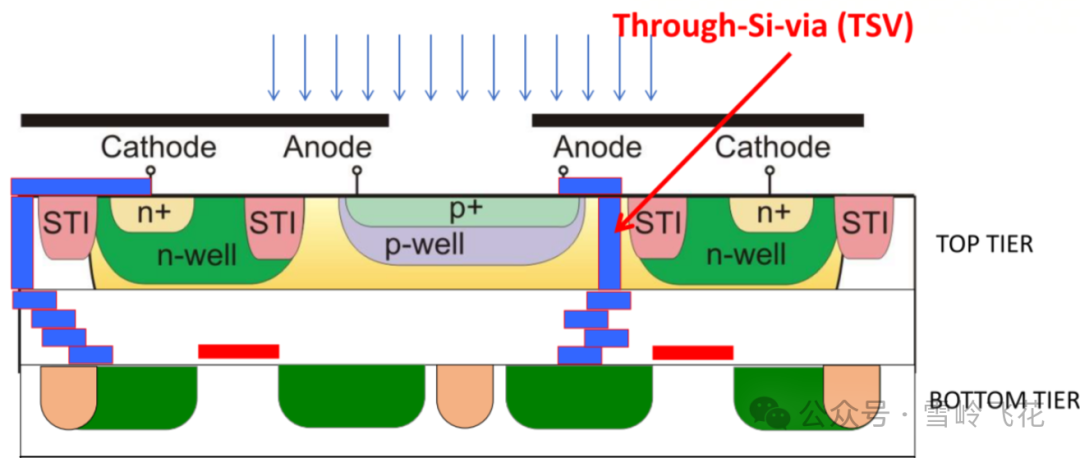
3. 3D堆叠工艺
1)前照式FSI+3D堆叠工艺:
2)背照式BSI+3D堆叠工艺:
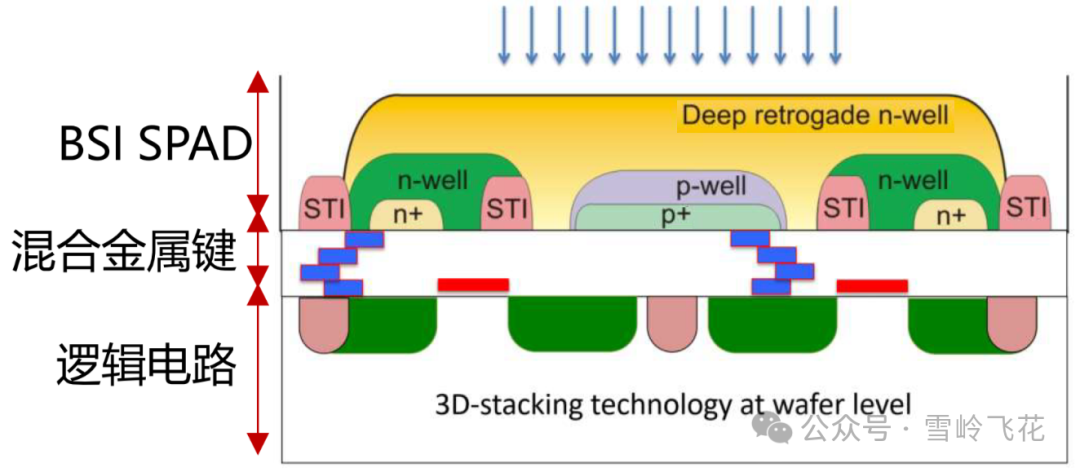
背照式BSI+3D堆叠工艺是目前最常用的方案,例如Sony的IMX459:
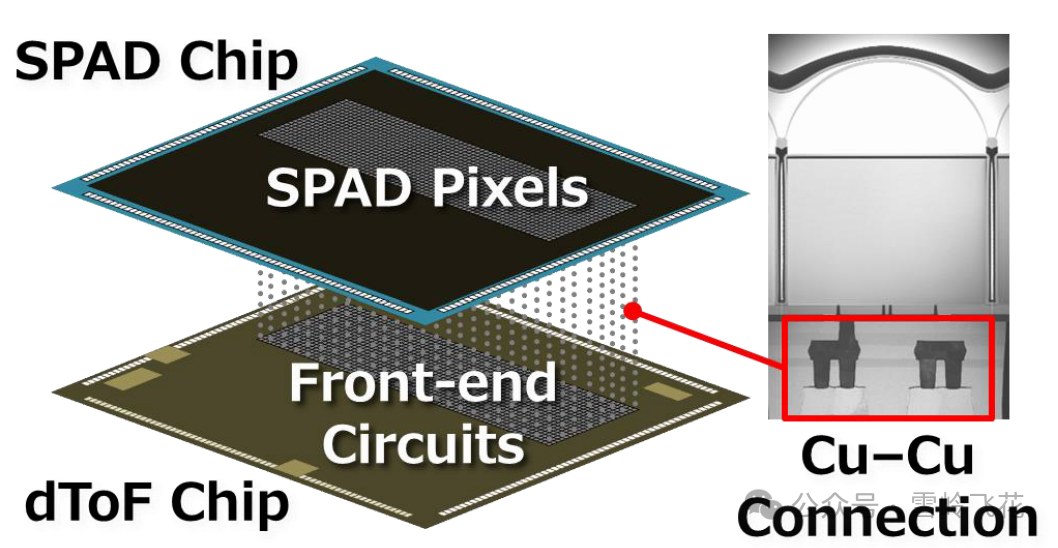
图片来源:Sony
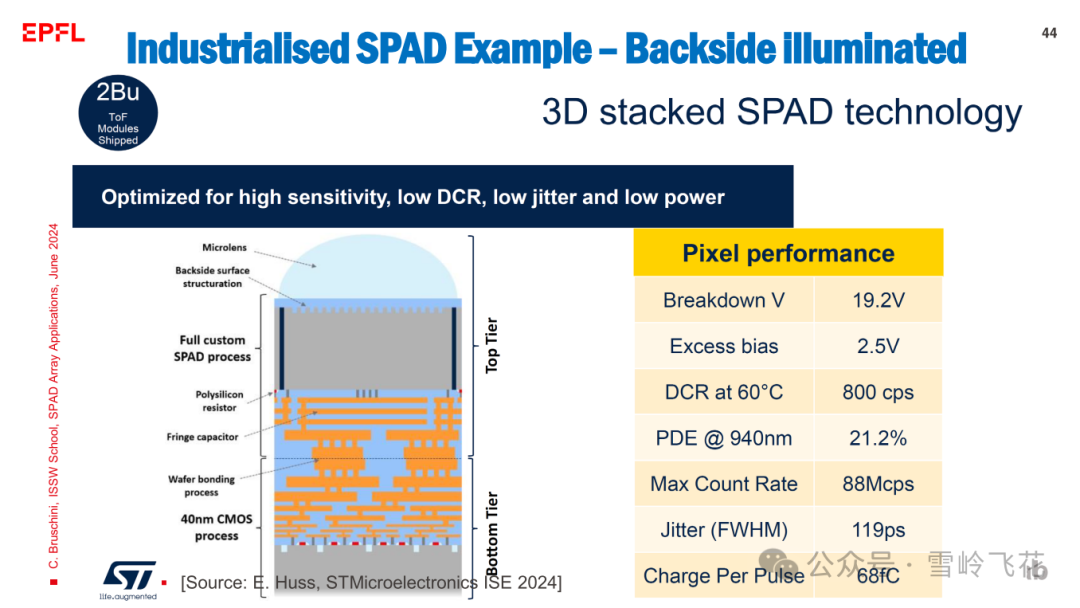
以及,ST产品的性能示例:
4. 类型
根据不同的面积需求,SPAD-SoC可以具有不同类型的阵列形式:
在车载领域,SPAD-SoC主要采用线阵和面阵这两种形态。
图片来源:Sony
03
SPAD-SoC优势和设计要点
SPAD-SoC的主要优势:
直接光子数字化,无需额外ADC,零读出噪声。灵敏度高,便于实现高速成像。
通过计数器的方式数光子,通过增加计数器的位数可以实现更高的计数值,动态范围大。
探测器和逻辑电路采用不同工艺节点,设计灵活,且功耗大幅降低。
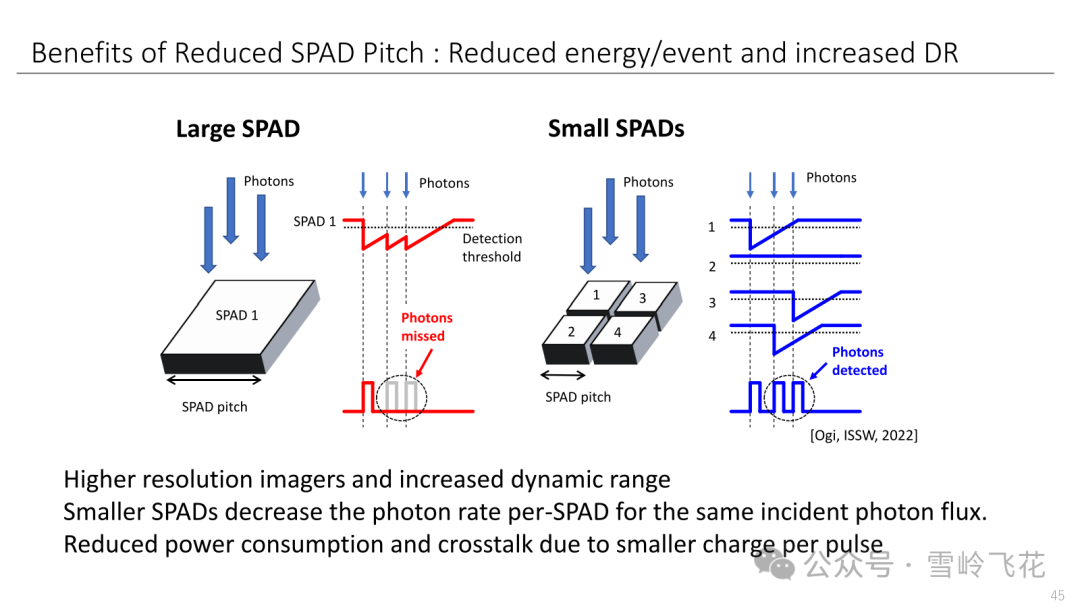
SPAD间距可以设置的很小(例如小于 10 µm,最低低至 2.2 µm),可以集成大量像素(十万~数百万像素),使得SPAD性能大幅提高,占空比高,面积小。
各模块间的数据传输不受分立芯片间的带宽和延迟限制。
集成度高,整机成本低。
不过,SPAD-SoC有较高的设计壁垒,其设计要点如下:
图片来源:阜时科技
关键的设计指标:
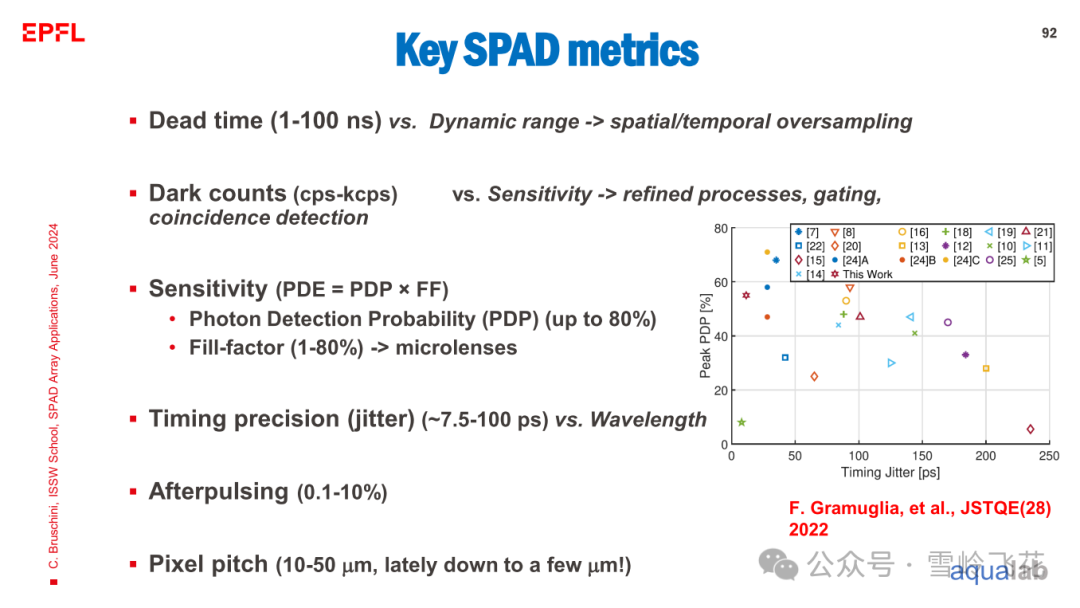
图片来源:EPFL
其中,PDE、DCR和串扰对于性能影响较大:
PDE:光子探测效率
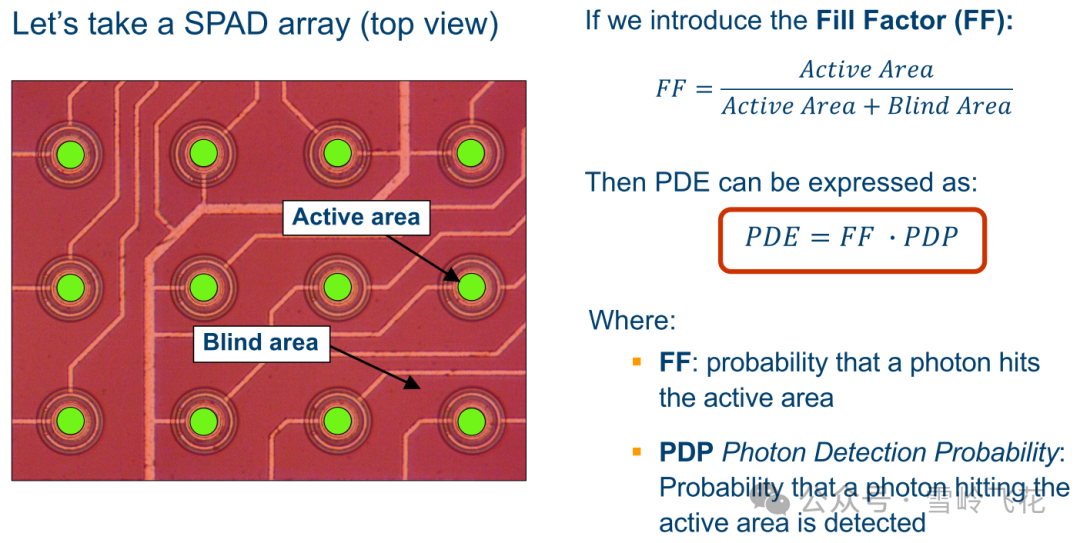
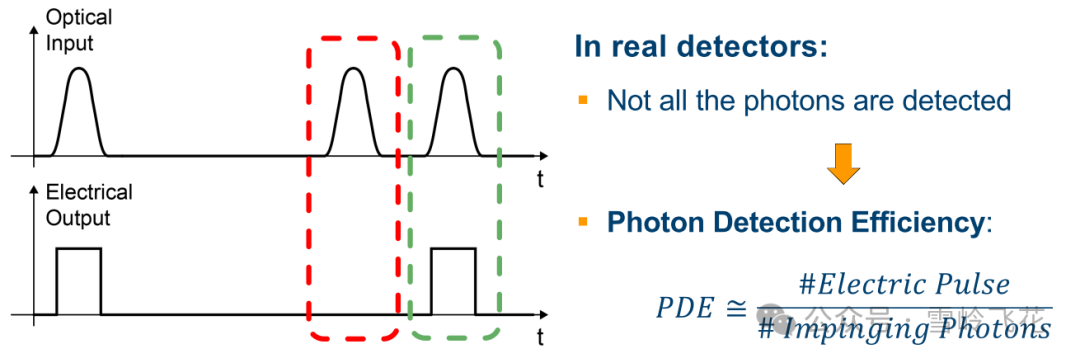
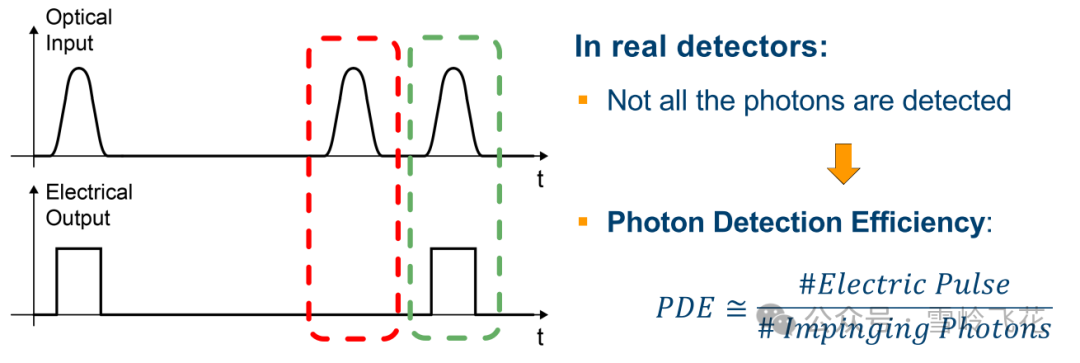
图片来源:ISSW2024,Gulinatti (Politecnico di Milano)
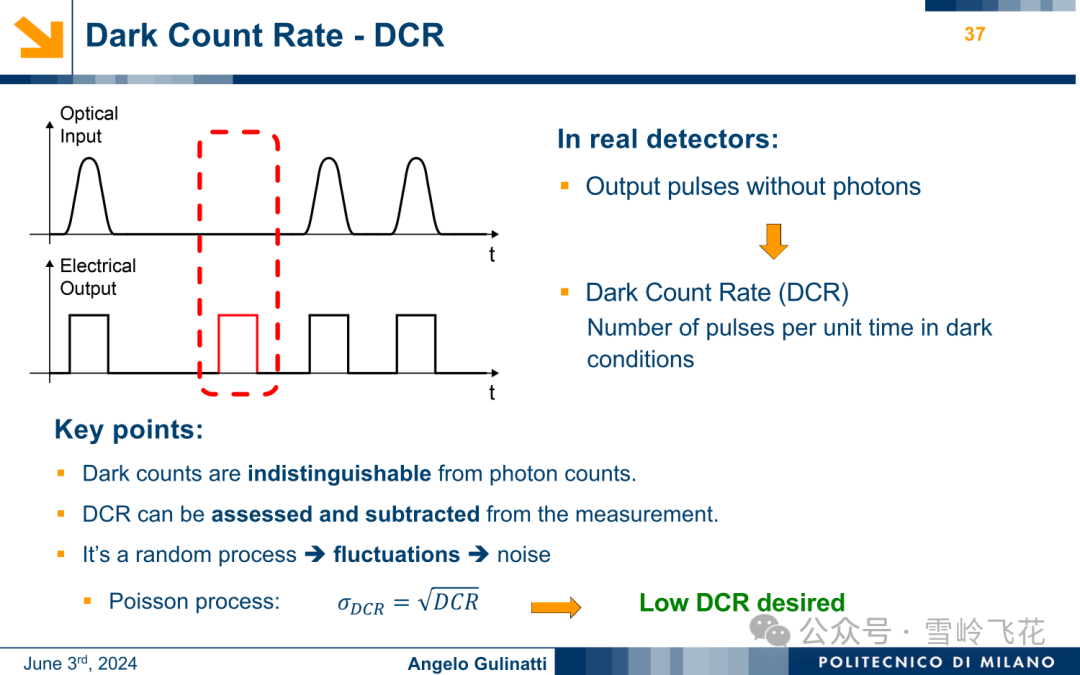
DCR:暗计数率
DCR是衡量在黑暗条件下,每秒触发 SPAD 事件数的指标(由于SPAD内部的热过程导致)。
串扰
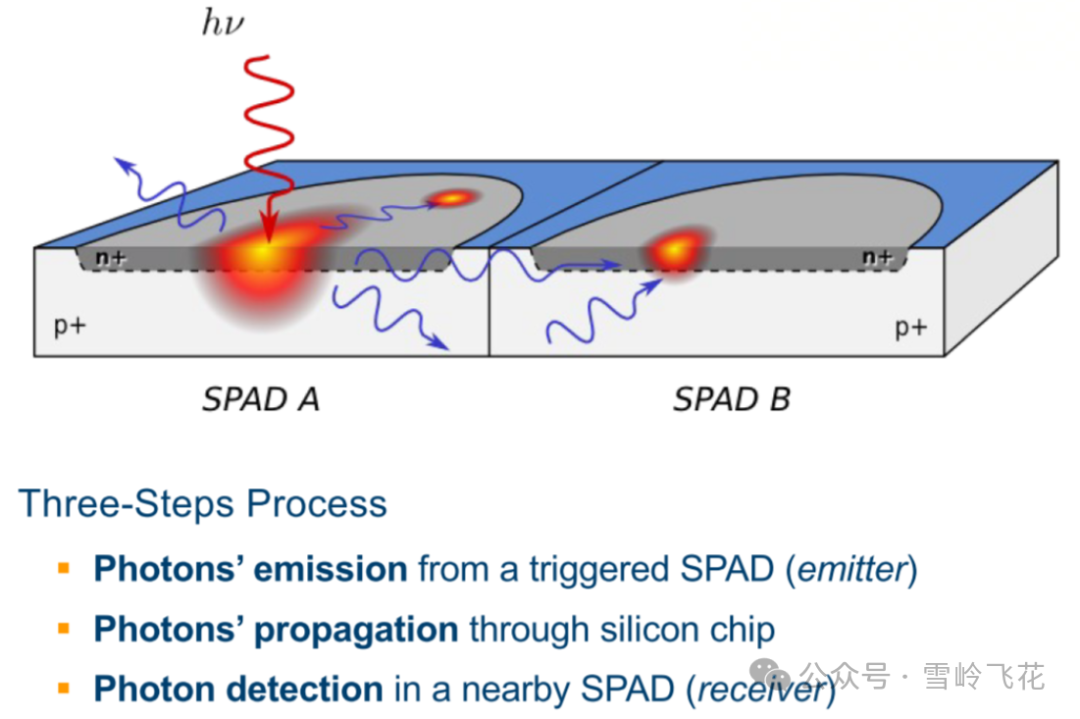
图片来源:Angelo Gulinatti
04
发展趋势
SPAD阵列的总体发展情况如下:
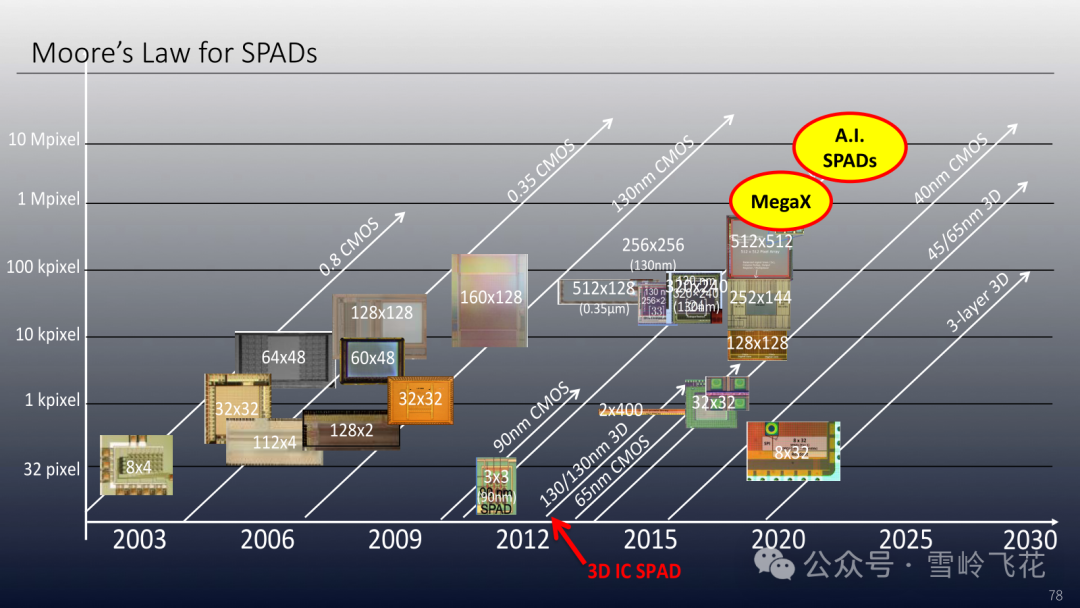
在激光雷达领域的发展趋势:
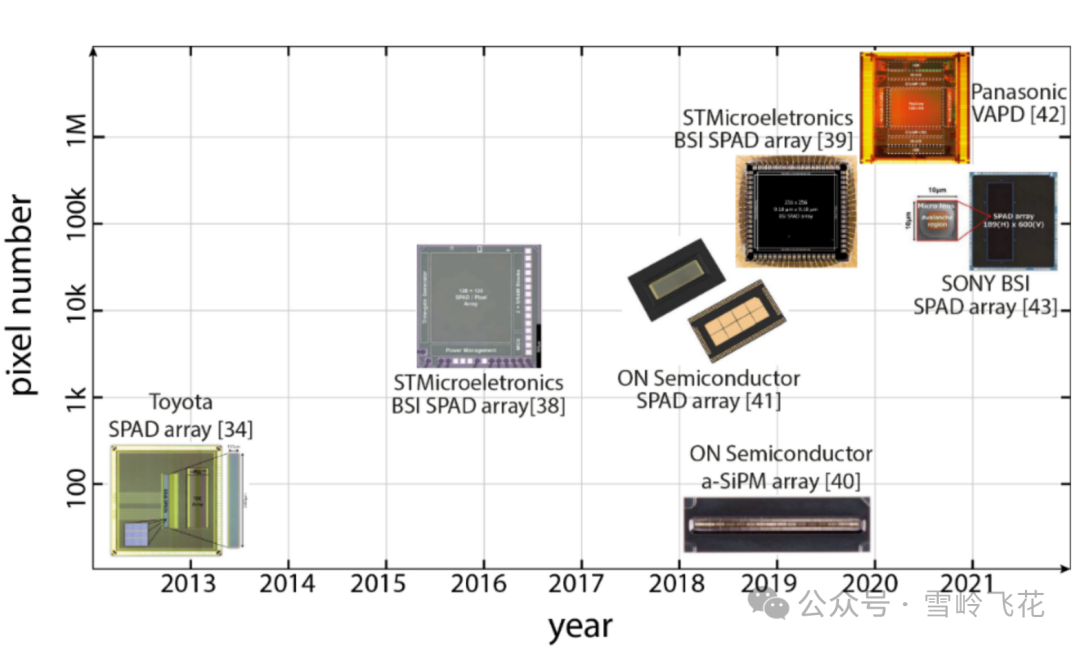
资料来源:《SPADs and SiPMs Arrays for Long-Range High-Speed Light Detection and Ranging (LiDAR)》
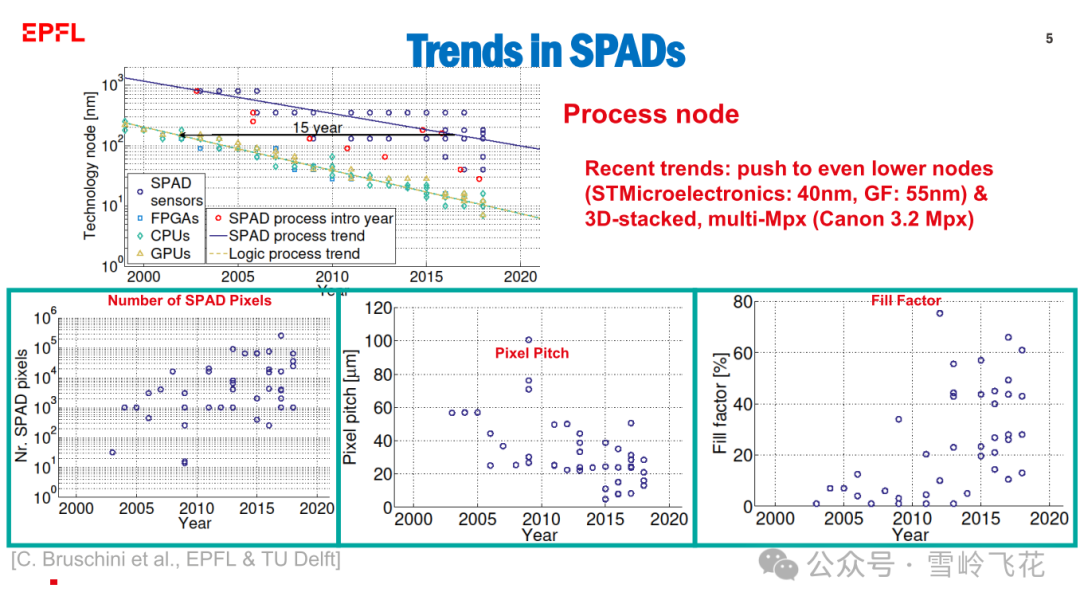
对于工艺节点、像素数、像素间距等的发展趋势:
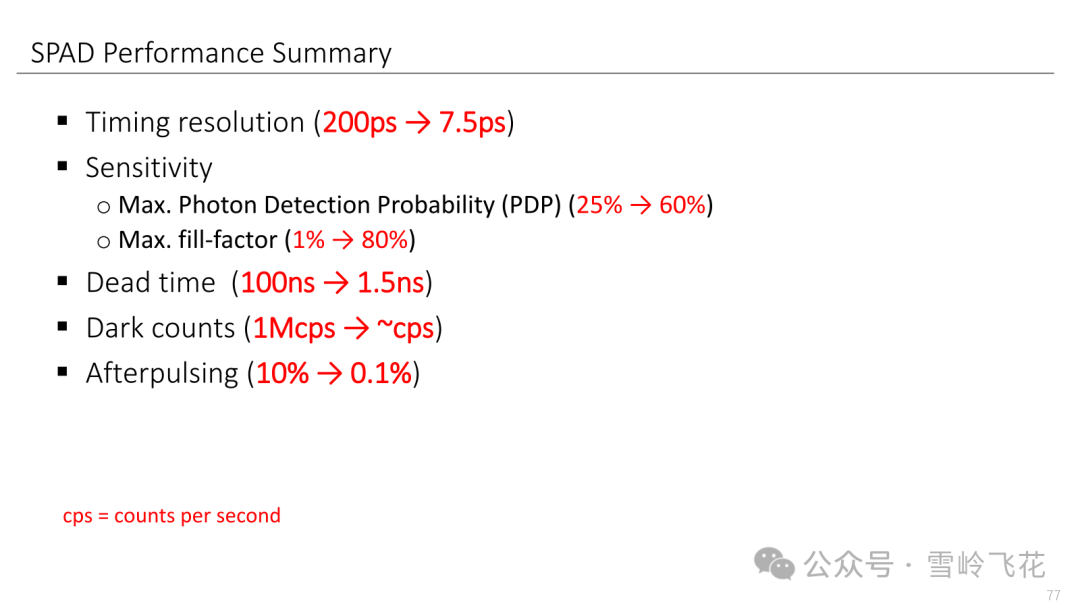
关键性能指标的发展趋势:
在车载领域,SPAD-SoC有如下几个发展方向。
1. 更小的像素尺寸,更大的阵列规模,提升性能
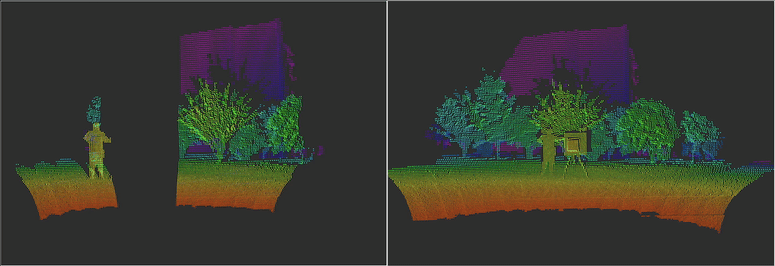
更大规模的SPAD阵列能够实现更好的探测效果:
不过,受制于器件设计和工艺,更小的像素尺寸和间距会使得串扰和抖动的挑战更大。
2. 集成度提升,降低成本
在SPAD-SoC芯片上完成数字化处理和高性能的片上算法,简化激光雷达的后端处理。
采用SPAD-SoC方案的车载高性能激光雷达,可以直接输出数字信号,后端仅需配备一颗超低算力的处理器即可完成激光雷达所有的信号处理。
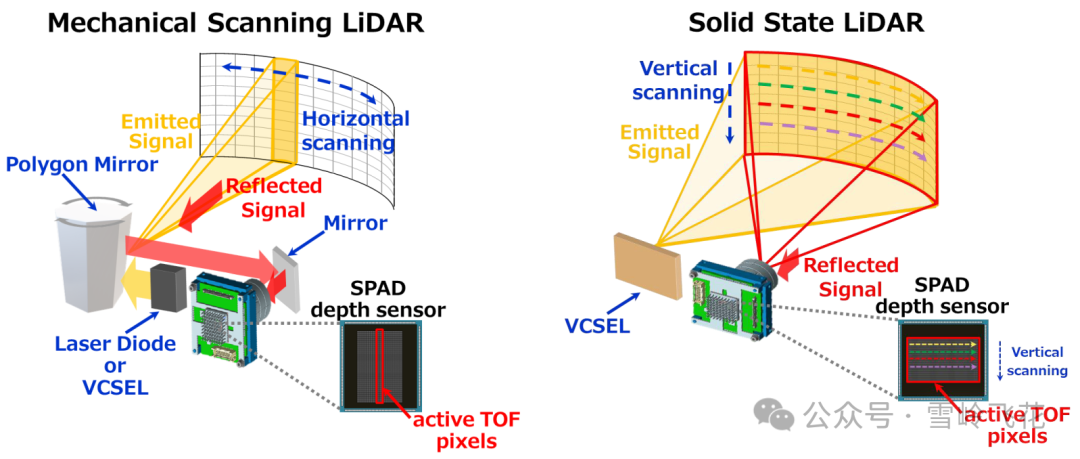
3. 通过2D寻址解决“高反污染”
对于全固态激光雷达来说,1D寻址只在一个轴方向上进行扫描,2D寻址可在X和Y两个方向上扫描。2D寻址扫描分区可以更小,同一分区内不同像素通道间的串扰影响更低,行业里公认2D寻址是解决激光雷达“高反污染”问题的最佳方案。
图片来源:识光科技
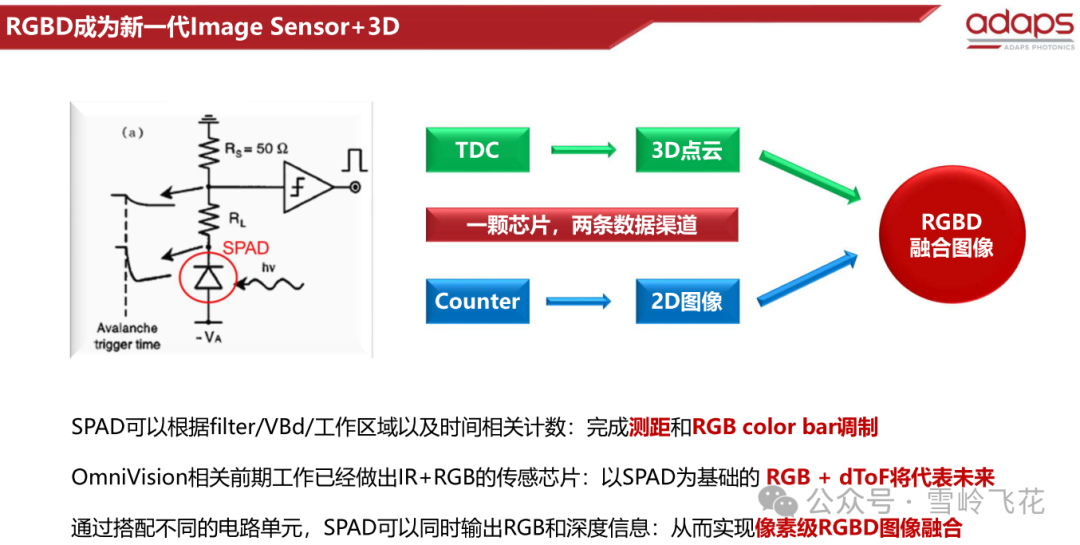
4. 多种数据模式输出(灰度+深度+RGB)
基于SPAD的无穷大增益和单光子检测能力,SPAD-SoC还将具备高速和暗光成像等特点,因而可对道路上快速移动、突然出现的物体进行实时探测,确保夜晚行驶的安全性。
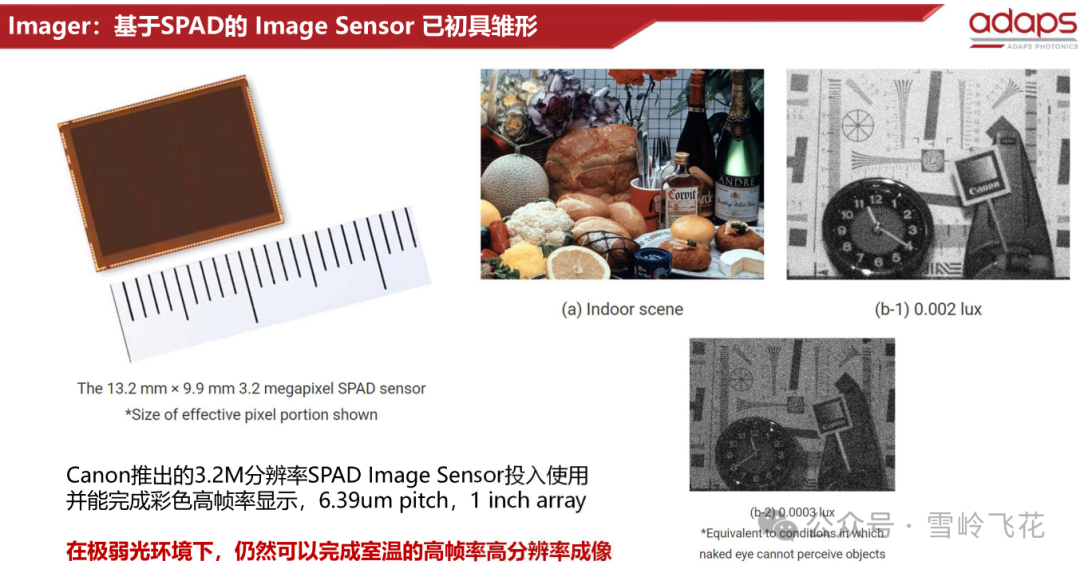
同时,SPAD芯片可以输出2D和3D数据,它无需搭配摄像头、无需对数据做后处理即可实时输出固定分辨率的深度图像、信号图像和环境图像,未来甚至可以替代部分低端摄像头。
如下是灵明光子对于SPAD-SoC的多数据模式方向的展望,供参考:


05
结语
本文是对SPAD-SoC的介绍较为简略,主要目的是抛砖引玉。
文章转载自公众号:雪岭飞花
作者:雪岭飞花
原文链接:https://mp.weixin.qq.com/s/rikZ3fGPdybsGVYgr3mc5A

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)