
yolov8_obb模型转换和部署
1.yolov8_obb pth转换onnx
1.1将yolov8_obb pth转换onnx,并且设置opset=11
1.2将onnx模型转置,例如我的模型输出是1x9x2100转换成1x2100x9,
2.将onnx转换成地平线J5的bin文件
2.1 制作校准集
由于python的yolov8_obb预处理代码如下
我们将03_yolov5x直接拷贝一份重新命名为yolov8_obb,由于03_yolov5x预处理代码和yolov8_obb一样,所以只需要将
改成训练的尺寸就可以,我训练的尺寸是320,所以改成
将02_preprocess.sh中 --src_dir 路径改成训练图片路径,大概100张左右
2.2 获取节点量化敏感度
上一步骤的基础上需要将先执行03_build.sh,需要在yaml配置文件中加入
获取节点示例如下:
2.3 模型转换
将yaml配置文件中model_parameters参数后面加上
yaml配置文件中model_parameters参数后面加上
yaml配置其他参数
运行03_build.sh,上面由于Softmax运行在cpu上,我将该算子运行在BPU上,并且使用了int16量化。
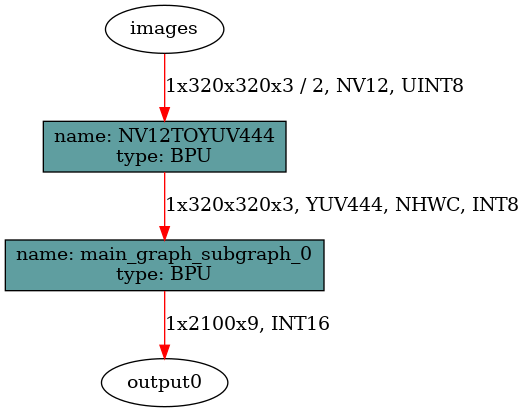
2.4 转换模型结果解析
使用hb_perf yolov8x_320x320_nv12.bin
3. yolov8_obb c++代码的预处理和后处理
3.1 yolov8_obb预处理代码如下:
3.2 yolov8_obb 后处理代码如下:
1.使用int16获取数据
2.使用下面命令查看模型信息
可以看出模型从9补齐到16了。
后处理代码如下,其中输出9含义是cx,cy,width,height,(旋转框中心点x,y,宽、高),类别1置信度,类别2置信度,类别3置信度,类别4置信度,角度。
对齐输出含义就是9后面补齐7个零。
相应的后处理代码如下:
上面的result是经过将旋转框置信度大于0.5的框(中心点x,y,宽、高、角度、置信度)过滤剩下框,接下来就是需要将result经过nms,得到最终的结果,nms代码有很多公开的,我就不提供了。
4.pth推理结果与bin文件推理结果进行对比
pth推理一个旋转框的结果如下:
bin文件旋转框推理结果如下:



'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)