
如果向朋友解释 “聊天-GPT”,你会怎么做?要讲的东西太多了,以至于很多人放弃了理解 LLM... 但是,如果我们不试图理解它,而是将其简化为以下 3 个想法呢?
核心架构是变压器网络。
它通过自我监督学习在整个互联网上进行训练,并可通过监督学习在数据集上进行微调
核心任务是在循环中预测下一个单词或标记。
这样我们就缩小了问题的范围,现在只需了解三件事: 变压器、自监督学习和下一个单词预测。在这之后,我们可能还需要更多的知识,但我们已经掌握了其中的要点。
许多概念起初看起来非常抽象,但一旦将它们拆解成几个部分,我们就会突然 “明白 ”了。
可视化 SLAM 也是一个类似的问题。起初,我们可能会觉得很难理解;有各种不同类型的 SLAM 算法,如卡尔曼滤波器、粒子滤波器、图,还有在线 SLAM 与离线 SLAM,以及循环闭合等等......
一旦我们将其拆分为更简单的概念,就能理解背后的工作原理,这 3 个概念遵循我在一篇关于深度学习的精彩研究论文中看到的地图:
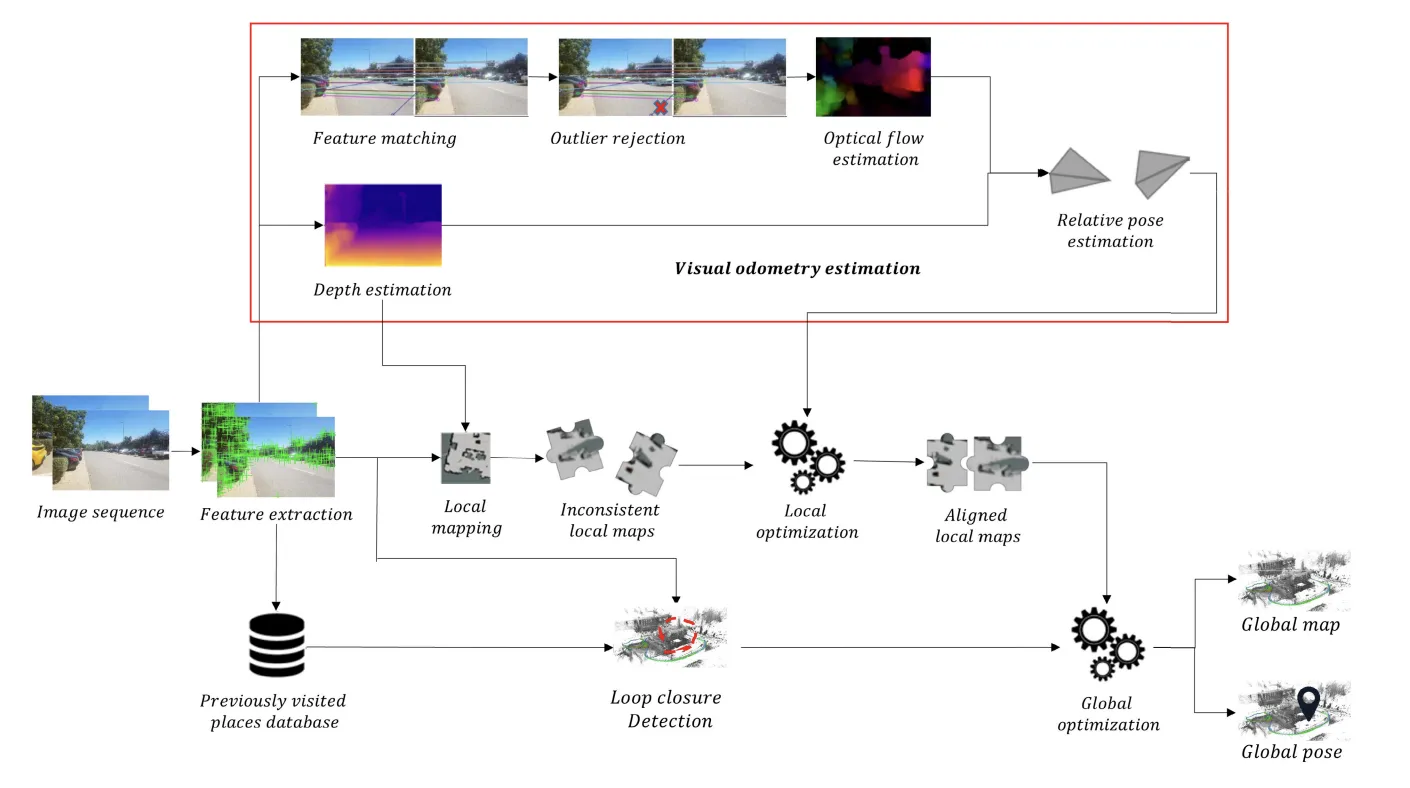
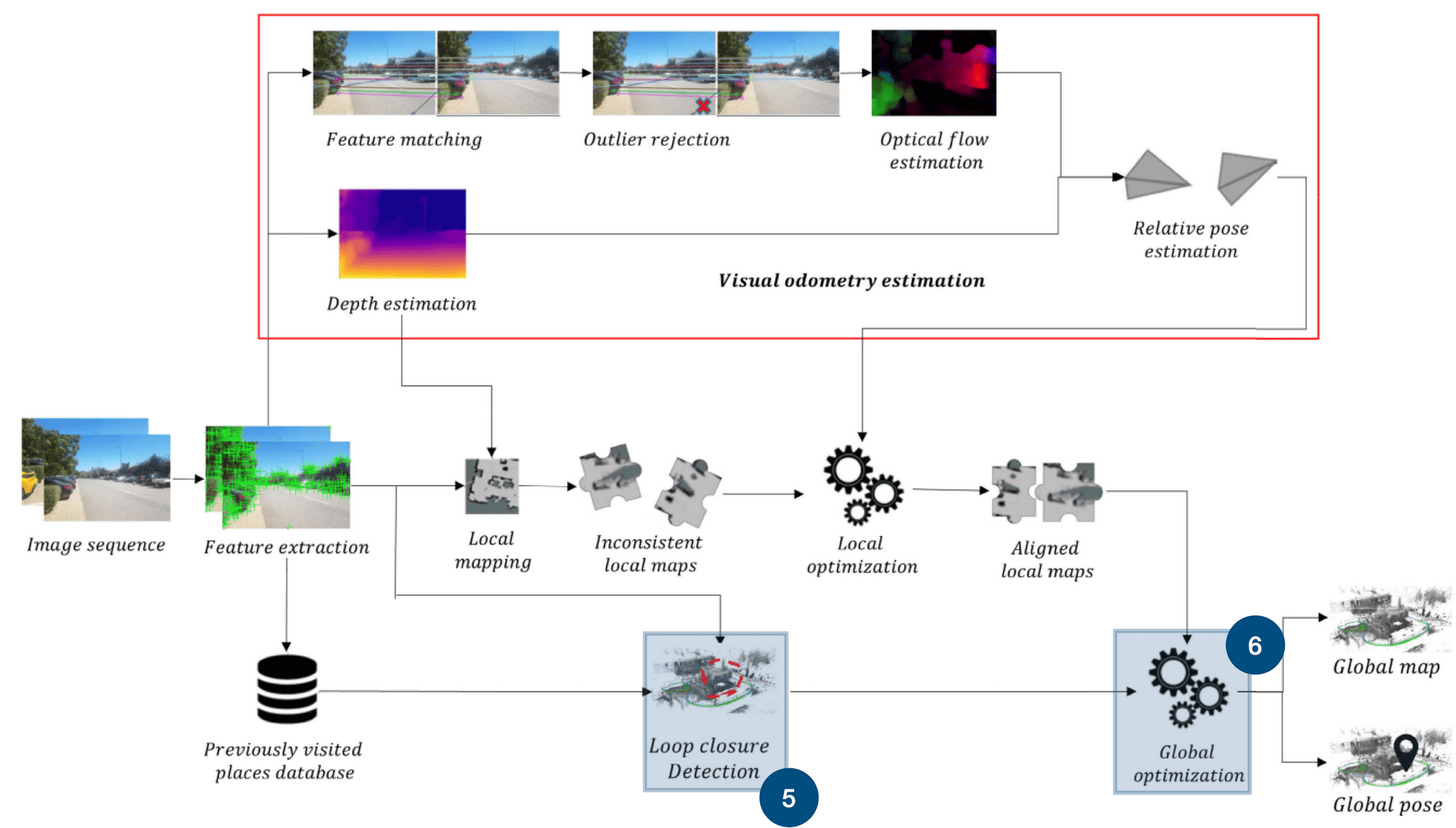
可视化 SLAM 工作流程
可以看到这个工作流程中有很多想法,但实际上我们可以简化为 3 个核心部分:
特征提取与视觉测距
局部映射与优化
闭环和全局优化
现在逐一查看这 3 个部分,我们将做两件事:
了解它们的 "作用
列出可能有效的算法,即 “怎么做”。
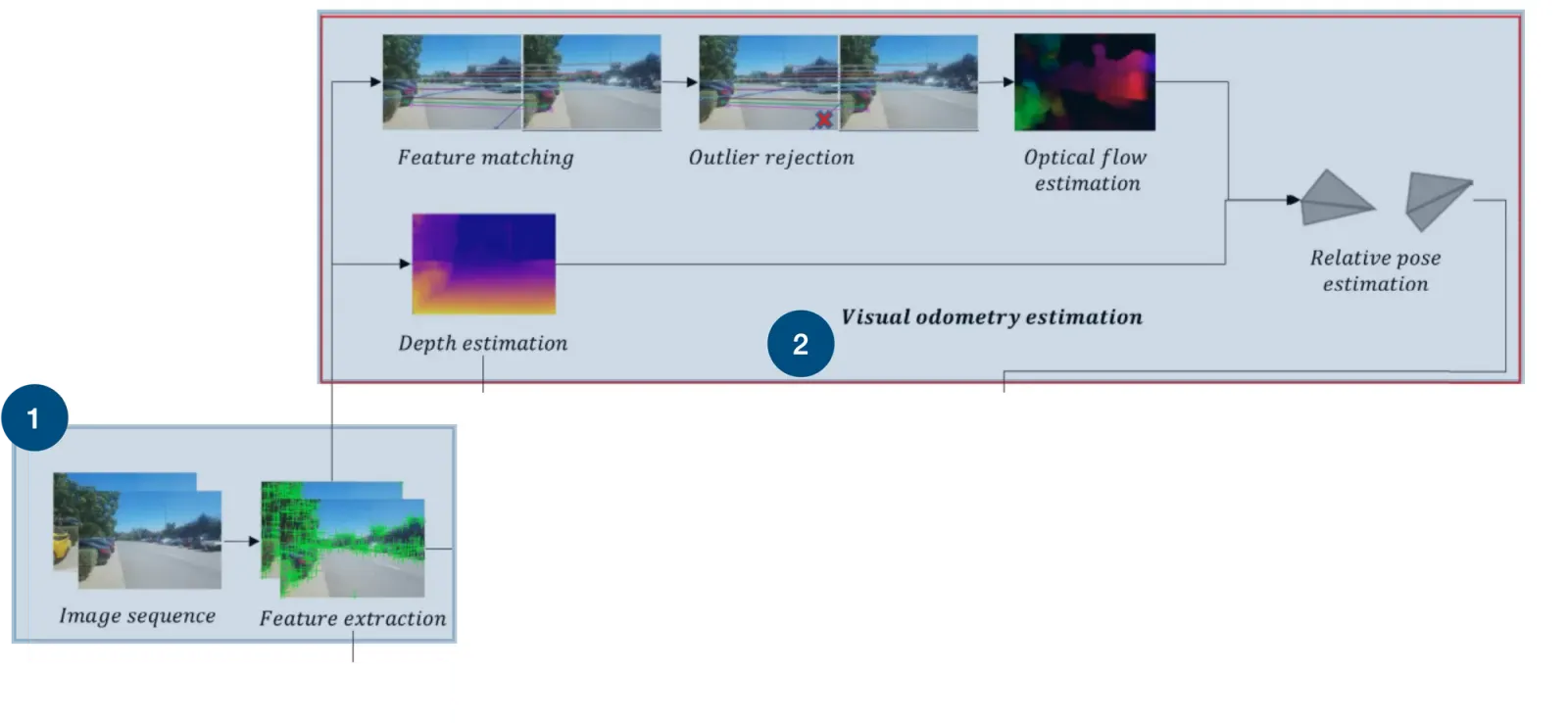
一、特征提取和视觉测距
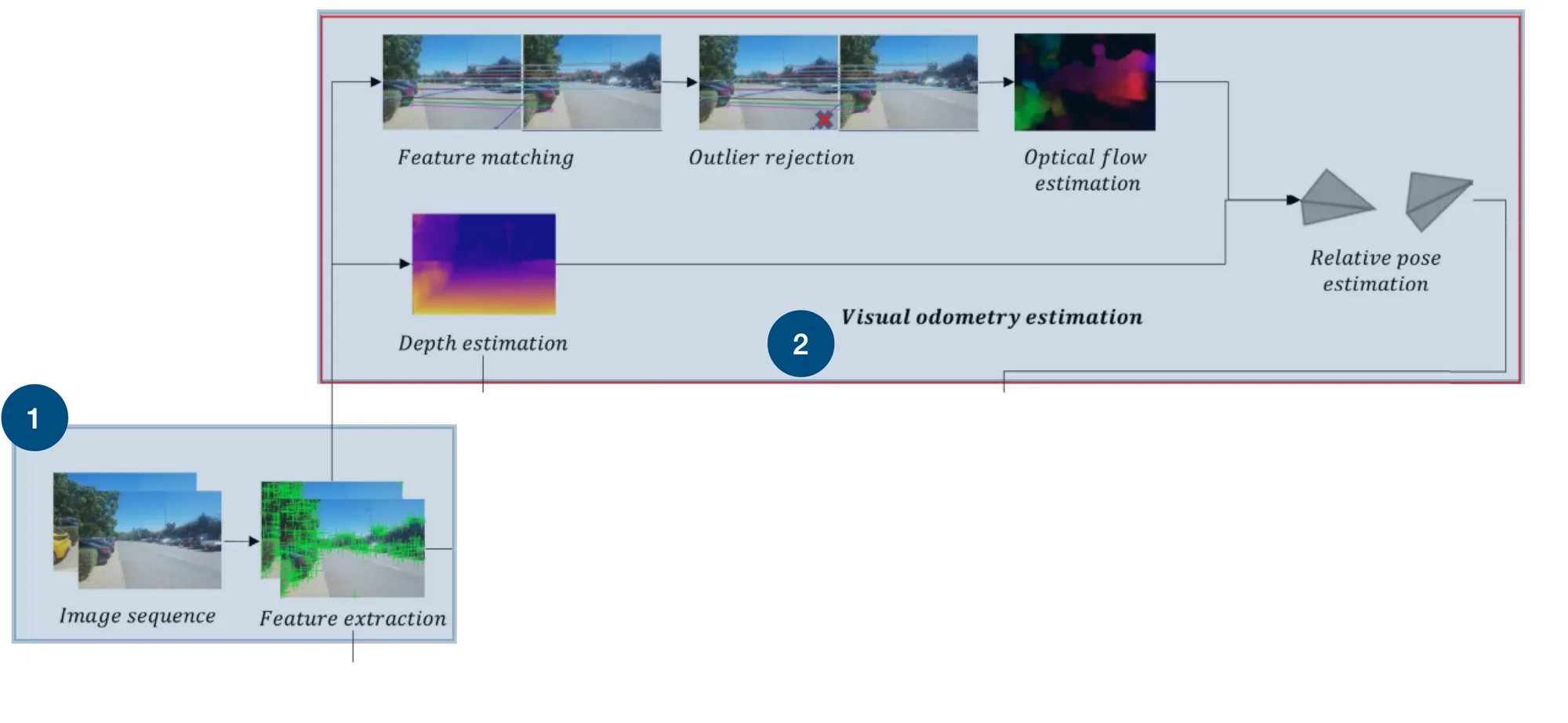
首先,我想谈谈这里的两个小模块。一个叫做 “特征提取”,另一个叫做 “视觉轨迹估计”。
1 - 特征提取
为什么要提取特征?这里说的是哪种特征?我们需要了解的是,可视化 SLAM 使用的是摄像头,因此没有激光雷达。那么如何用激光雷达来替代点云呢?我们可以计算图像上的特征,然后将其视为点!
这里将使用算法来计算视觉特征(边、角、梯度等)。下图显示了上图(视觉特征)和下图(点云)。
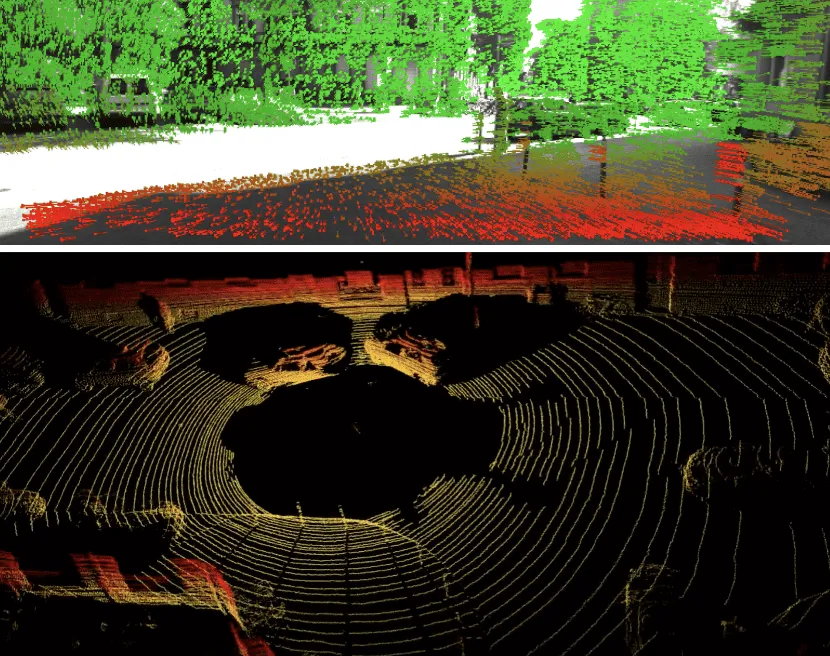
顶部:视觉特征(视觉 SLAM) | 底部: 点云(普通 SLAM)
工作原理
它是如何工作的?寻找特征点的要点如下:
边角检测器: FAST(Features from Accelerated Segment Test),哈里斯拐角检测器。
Blob 检测器: SIFT(尺度不变特征变换)、SURF(加速鲁棒特征)。
边缘检测器 Canny 边缘检测器
特征描述器 ORB(定向 FAST 和旋转 BRIEF)、BRIEF(二元鲁棒独立基本特征)、BRISK(二元鲁棒不变量可扩展关键点)。
深度学习: 使用卷积神经网络(CNN)进行特征检测和描述。我不得不说,每一位尝试用深度学习取代视觉特征的勇敢研究者都失败了!不要这样做
检查算法:ORB, FAST, Harris Corner Detector, SIFT, SURF, ...
2 - 视觉测距
第二部分是视觉轨迹测量。视觉轨迹测量学是一门根据视觉信息计算汽车移动幅度的科学。例如,点云在上一秒移动了多少?视觉特征移动了多少?
为此,我们建立了一个管道,通过分析一系列图像中特征的视运动变化来估计摄像头的运动。
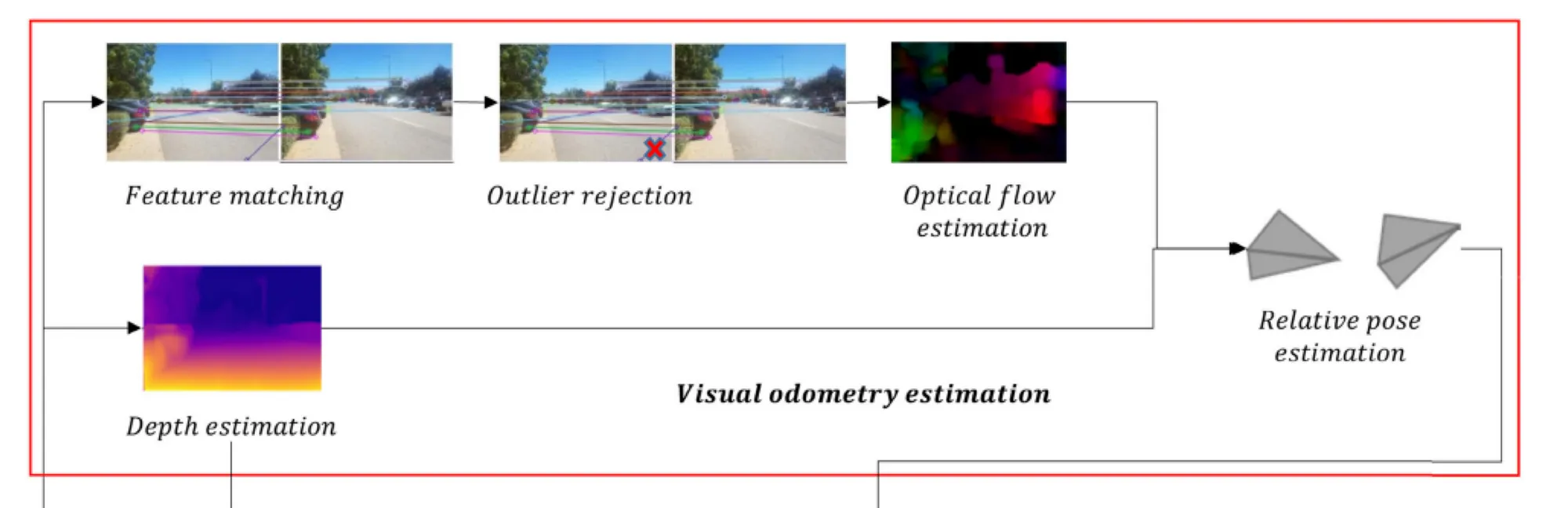
视觉检偏部分包括特征匹配、异常值剔除(通常使用 RANSAC),甚至还有光流!
现在能找出核心部分吗?它们是
特征匹配:匹配和跟踪帧与帧之间的特征
异常点剔除:剔除我们匹配错误的特征
光流估计: 计算每个特征随时间移动的程度
深度估计: 因为知道深度总是有帮助的;深度可以通过立体相机获得,这可能比使用单目相机更好。
输出结果?视觉里程计--摄像机的运动。请看下面的操作:
(资料)
工作原理
我们已经看到了单目视觉测距的工作原理,但这并不是唯一的方法。可以使用立体视觉,并以不同的方式进行计算。我们完全可以将这部分内容抽象化,有很多方法可以计算摄像头的运动,甚至可以使用 IMU(惯性测量单元),这样就可以得到视觉惯性运动轨迹测量法(VIO)。
检查算法: RANSAC、透视 N 点 (PnP)、5 点算法、特征匹配、直接稀疏测距 (DSO)
第 1 部分是关于提取特征并识别其运动。这将用于什么呢?让我们一探究竟。
第 2 部分:局部优化和映射
局部映射和优化是 SLAM 的核心
接下来的两个部分是局部映射和局部优化。
3 - 本地制图
还记得我说过可以用可视化特征代替点云吗?这个想法有一个缺陷:
点云是三维的
而视觉特征是图像上的二维像素
因此,当你观察机器人测绘以及机器人使用的地图类型时,会发现我们有点云地图、矢量地图、占位地图、特征地图等...... 但并没有真正使用视觉特征的方法。
如果我们能将这些二维像素 “投射 ”到三维空间,那就再好不过了。局部映射将深度图和提取的特征放入三维图中。这是一个真正的 “映射 ”步骤,我们将二维特征映射到三维中的相应位置。
论文: VIRAL SLAM:紧密耦合的相机-IMU-UWB-激光雷达 SLAM
如何操作?
有很多方法可以实现这一步,这正是 SLAM 的核心。我们可以使用稀疏地图或密集地图;可以使用三维重建技术,如多视图立体和运动结构;可以使用卡尔曼滤波器或粒子滤波器,因为在每一个步骤中,我们都需要:
预测和更新每个特征在 3D 中的位置
预测并更新摄像机在三维环境中的位置
检查算法: 三角测量、立体视觉、LSD-SLAM、EKF-SLAM、快速-SLAM
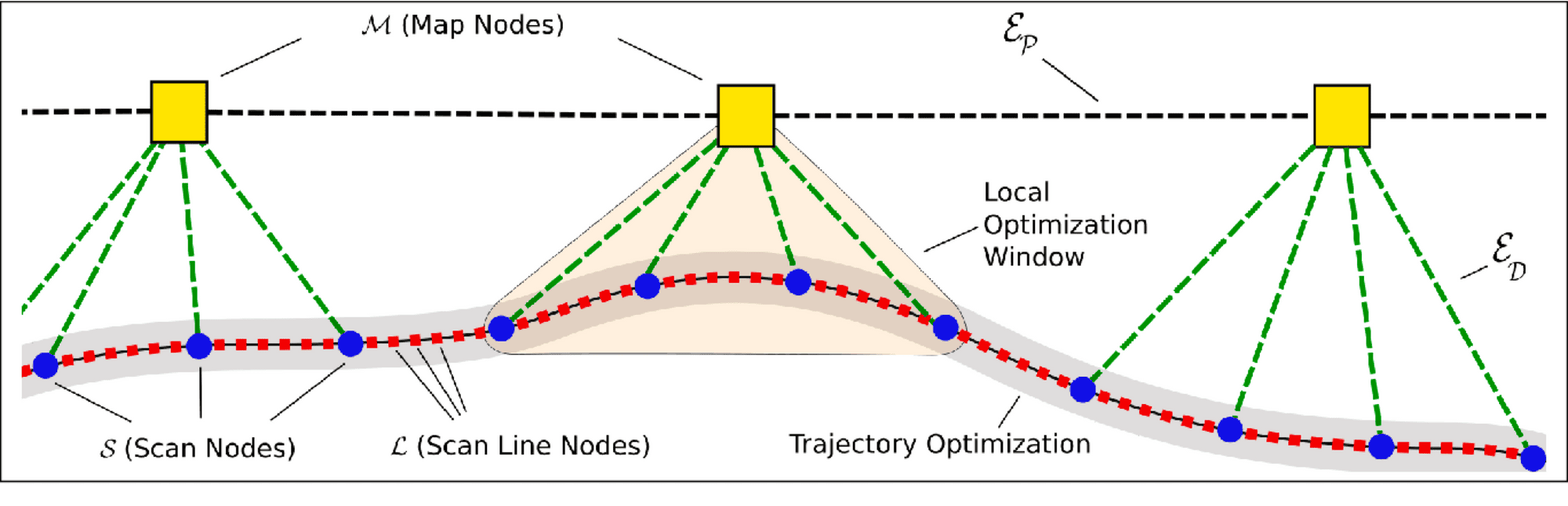
4 - 局部优化
在这一步中,每帧都有一个微型局部地图。这很酷,但有一个问题:容易造成误差累积。把它想象成卡尔曼滤波器,如果没有卡尔曼滤波器,我们就无法真正实现时间上的一致性,而在这里,我们也面临着同样的问题:我们希望对齐我们的地图,使其在帧与帧之间保持一致。
如果我们在每一步都将特征投影到三维空间,就会积累误差,因此这一步就是重新对齐连续的地图。
论文 基于激光雷达的三维在线测绘的高效连续时间 SLAM
工作原理
这一步取决于使用的核心 SLAM 算法:
如果使用卡尔曼滤波器,更新步骤将处理所有内容的对齐。
如果使用的是图-SLAM,则需要将每个地标的姿势和你的姿势保存在一个巨大的图中,这一步就变成了图优化。
像迭代最接近点这样的算法在这里也非常有用。
需要检查的算法: 迭代最接近点 (ICP)、捆绑调整、Ceres 解算器
在这一点上,我们拥有大量的本地地图,并通过时间同步和对齐,已经在本地完成了这一切,但从未真正在全球范围内完成过。因此,是时候调整全球地图了!
第 3 部分:环路闭合与全局优化
最后一步是全局优化,我们希望地图在大尺度上更有意义
前两个步骤是 “局部 ”的,我们处理的是连续地图。接下来的最后 2 个模块是全局性的,我们要为正在访问的世界绘制全局地图,这要用到两个想法:
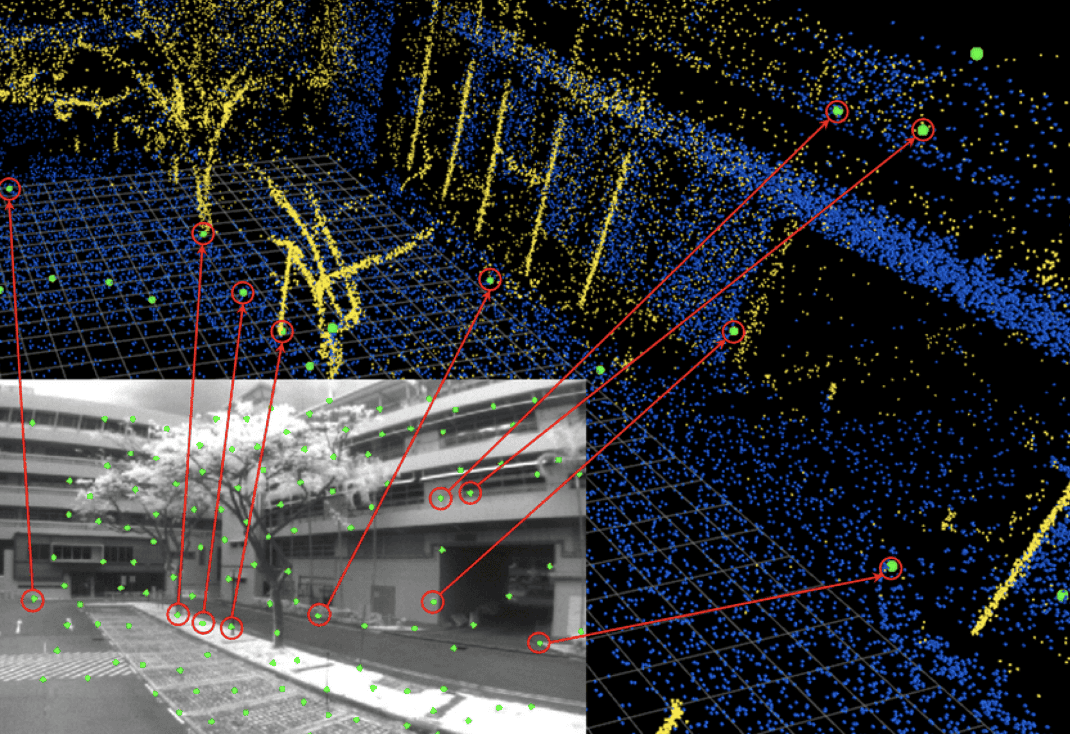
5 - 循环闭合检测
环路闭合是可视化 SLAM 和 SLAM 中最有趣的想法之一,是将很久以前已经访问过的点或特征对齐的想法。我的无人机经过帝国大厦,然后绕曼哈顿一圈,然后再次看到帝国大厦。嘭!关闭循环,对齐第一次和第二次访问的点云。
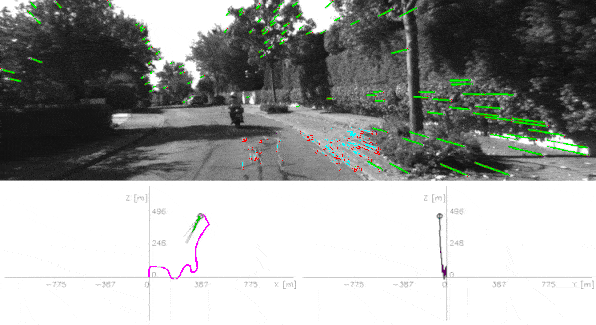
从这个可视化 SLAM 示例中,我们可以看到它是如何工作的:识别之前访问过的区域,纠正地图或轨迹随时间发生的漂移,更新整体地图和机器人在其中的姿态。
闭环检测示例(KITTI 数据集)
工作原理
“闭环检测 "步骤就是检测,最常见的方法是使用 “词袋”(Bag-Of-Words),也有基于图的方法。
检查算法: 词袋算法、FLANN、DBoW2
6 - 全局优化
最后,我们汇总来自局部地图的所有信息,运行捆绑调整并完全优化地图。这一步是对整个地图进行对齐!我们可以在全球范围内再次使用局部优化的技术。在许多方法中,我们都在使用图优化。
检查算法: 姿态图优化、ATLAS、捆绑调整
这就是视觉 SLAM 的 6 个组成部分!先做一个简单的总结,然后去看看 Visual SLAM 的一些常用算法。
总结
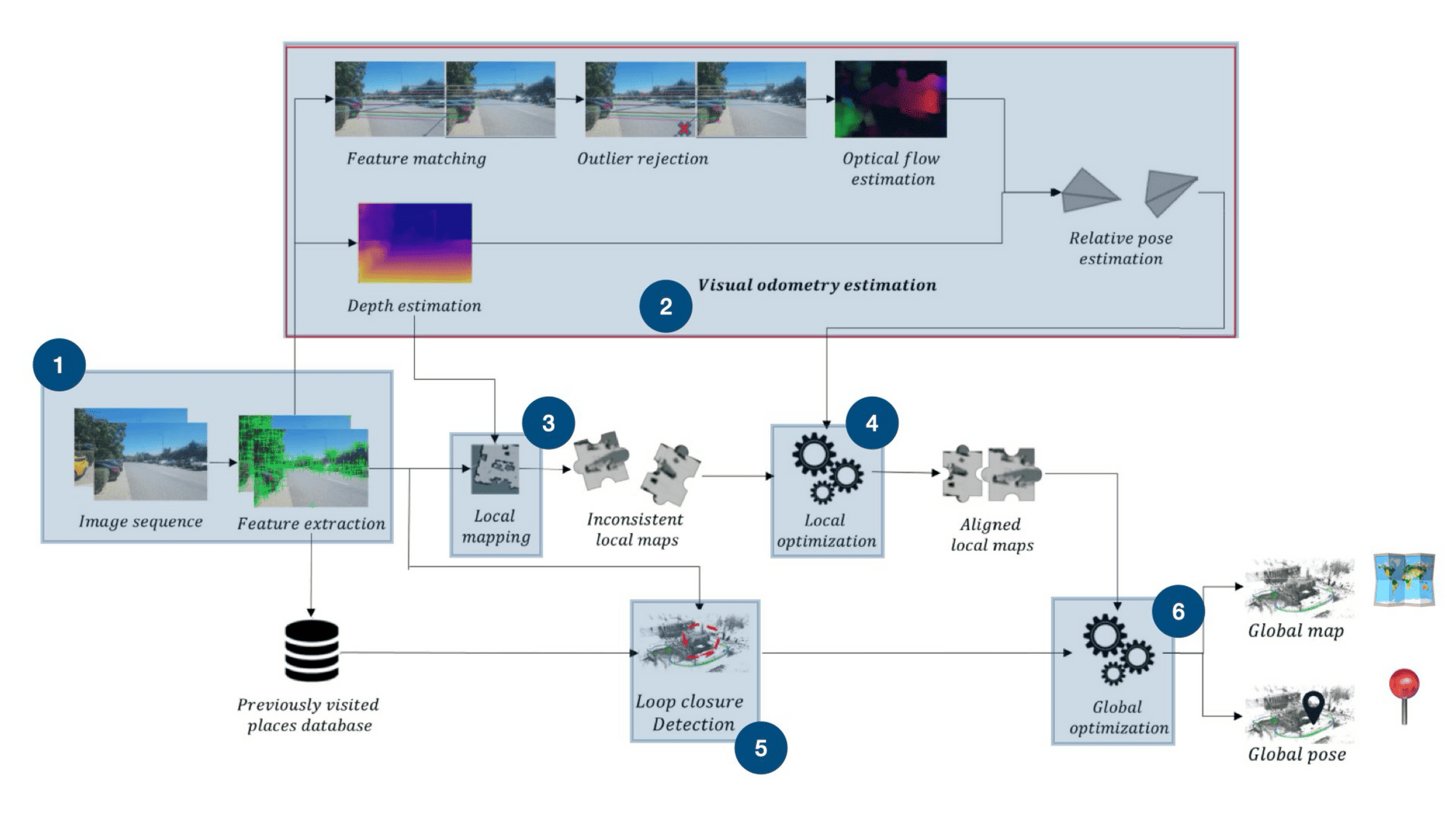
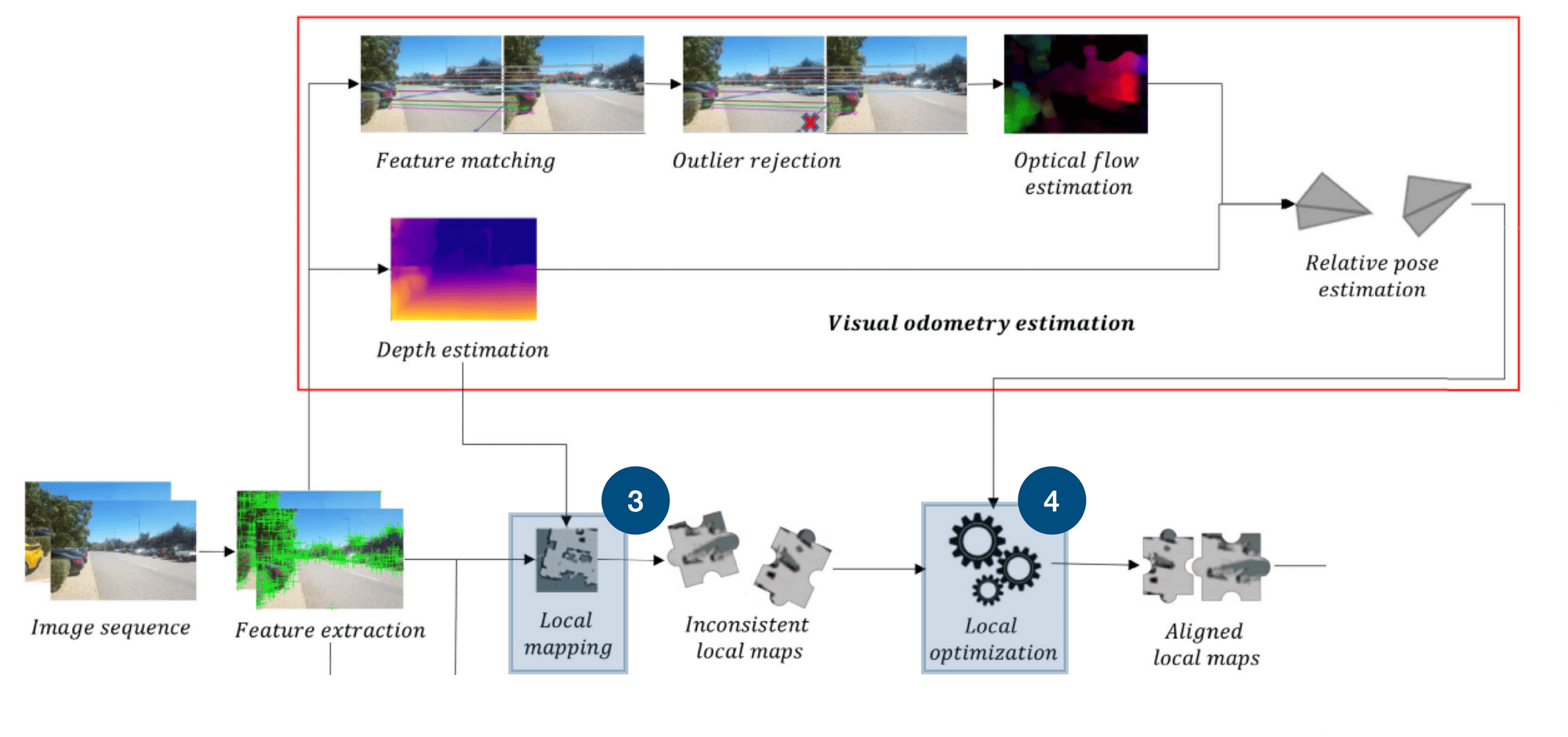
视觉 SLAM 算法的最终工作流程
以下是 6 个步骤,请注意我们是如何从图像自然流向地图和姿势的!让我们来做最后的分解:
特征提取是从图像中提取视觉特征的步骤。
视觉运动测量是紧接着的一步,我们通过计算帧与帧之间的特征运动来计算摄像机的运动。
在局部映射中,我们将特征投射到三维空间中。这一步是 SLAM 的核心步骤,我们在此创建地图,可以使用三角测量法、深度图或其他方法。
在局部优化中,我们要使用局部地图和里程计对帧与帧之间的连续地图进行对齐。
环路闭合检测的目标是识别出之前到过的地方。我们将通过比较当前特征和历史特征来实现这一目标。
最后,全局优化就是对齐整个地图并生成最终输出:地图和姿势。
现在,让我们来看个例子...
示例 1: ORB-SLAM
视觉 SLAM 中最著名的算法之一叫做 ORB-SLAM。
特征提取: 顾名思义,我们使用的是 ORB 特征。这些特征非常流行,在本例中也非常有效。
视觉测距: 接下来,我们将把这些特征与上一帧或本地映射中的特征进行匹配,根据这些匹配结果估算摄像机的运动轨迹,并通过 RANSAC 等优化技术对估算结果进行改进,以尽量减少重投影误差,从而确定摄像机相对于上一位置的姿态。
局部映射: 我们通过对匹配的 ORB 特征进行三角测量来创建局部映射,并使用局部束调整对其进行优化。3D "是通过特征的运动来计算的。
局部优化: 这一步使用名为 “捆绑调整 ”的方法完成。我不会在这里对它进行描述,但它是一种算法,可以最大限度地缩小图像中观察到的特征位置与根据摄像机模型和 3D 点估算得出的预测位置之间的差距。
闭环:这一步的工作原理是使用词袋(BoW)模型将当前帧与之前的所有关键帧进行有效比较。当发现具有高相似性得分的潜在匹配时,就会执行几何验证,以确保循环闭合有效,从而进行姿态图优化,以纠正累积漂移并确保地图的全局一致性。
全局优化: 这一步是最后的优化,在这种情况下,我们要更新一个图,所以是 GraphSLAM。
其实要更复杂一些,实际步骤如下:
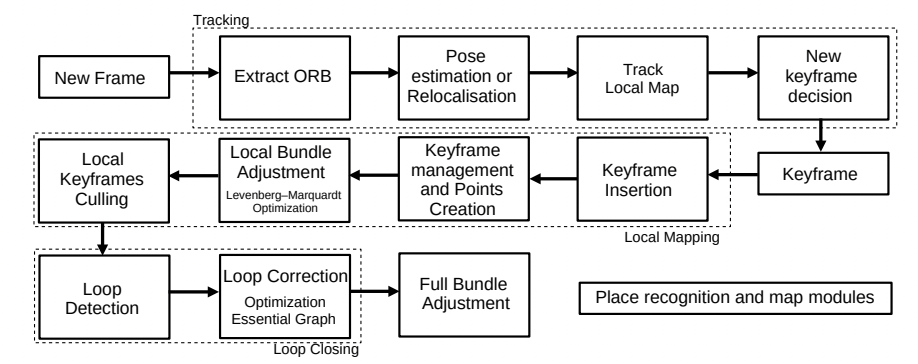
ORB SLAM 算法--你能找出这里的 6 个步骤吗?
结论
可视化同步定位与测绘(Visual Simultaneous Localization And Mapping)是指在用摄像头绘制世界地图的同时,对机器人进行可视化定位。如今,可视化 SLAM 系统已经变得非常出色,甚至可以用来绘制地图!最初,SLAM 是在没有地图的情况下使用的,属于边缘情况。如今,它可能是公司用来构建高清地图的主要方法之一。
在本文中,我向大家介绍了检测点特征的想法,但这是非常 “稀疏 ”的。事实上,我们甚至可以称之为 “稀疏 SLAM”。当我们有了激光雷达,或者至少有了 RGB-D 摄像头,我们也可以建立密集视觉 SLAM 算法。可以查看 “弹性融合 ”或 “LSD-SLAM”,了解在进行密集绘图时的不同之处,这也是构建更加精确的单目 SLAM 系统的一种方法。
我们已经讨论了自动驾驶中的 SLAM,但我们也意识到视觉 SLAM 还可以应用于许多其他领域...... 比如三维重建、计算机视觉、混合现实和增强现实。事实上,我很确定苹果的 Vision Pro 中就有这样的算法。
原文链接:https://www.thinkautonomous.ai/blog/visual-slam/

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)