
本文梳理了车载摄像头、毫米波雷达、超声波雷达、激光雷达、V2X,含当前现状、上车情况等,基础科普性质。
环境感知是一个复杂的系统,它需要多种车载传感器实时获取周边环境的信息,通过算法分析处理原始数据,给出合理的判定结果。一般而言,原始数据的质量越高,后续数据分析处理的难度就越低,而获取高质量的数据离不开性能优异的车载传感器。由于不同传感器的原理属性不同,功能也各有分别,通过多传感器来获取目标物不同维度的信息,融合互补,能够有效提高感知系统的准确性。
01.摄像头
摄像头的缺点也是显而易见的。与人类视觉一样,它很难全天候工作,在黑夜、雨雪、大雾等能见度低的情况下,识别率将大幅降低。
车载摄像头方案可分为单目、双目和多目,对目标物的感知维度也逐次增加,感知判断也更加精准。
一辆 L2 的车一般会配备高达 11 个摄像头:2 个前向 + 4 个侧向 +1 个后向+ 4 个环视。从整车功能需求和成本考虑,目前车辆的前视摄像头多采用多目方案,主要服务于 LDW、FCW、TSR、LKA、PCW 等功能,成本约在 300-500 元之间;侧视和后视的摄像头可采用较为简单的单目方案,主要服务于辅助泊车功能,价格在 150 元左右。国内摄像头技术已经相对成熟,基本实现了国产化替代。
从各车企发布的新车配置可以看出,800W 像素摄像头是目前市场顶配,分辨率可以达到 4K,这意味着智驾系统可以看的更清、更远,整体效果相较双目或三目摄像头都更优一些。8MP 摄像头巨大的数据采集量,除了硬件层面需要搭配大算力芯片,算法层面也是一个技术核心。新势力 TOP 车企更倾向于自研算法,不会开放给行业使用。目前已发布的车型,如蔚来 ET7 配有 7 颗 8MP 摄像头、理想 L9 AD MAX 版配有 6 个....

蔚来 ET7 车顶,激光雷达(中)和 2 个 800 万像素摄像头形成了一个瞭望塔式结构
02.超声波雷达
海洋中的鲸鱼、夜间飞行的蝙蝠都是通过高灵敏度回声进行测距,它们发出超声波,超声波遇到障碍物就会反射回来,形成回声,然后根据超声波往返时间来准确判断自己与障碍物之间的距离。
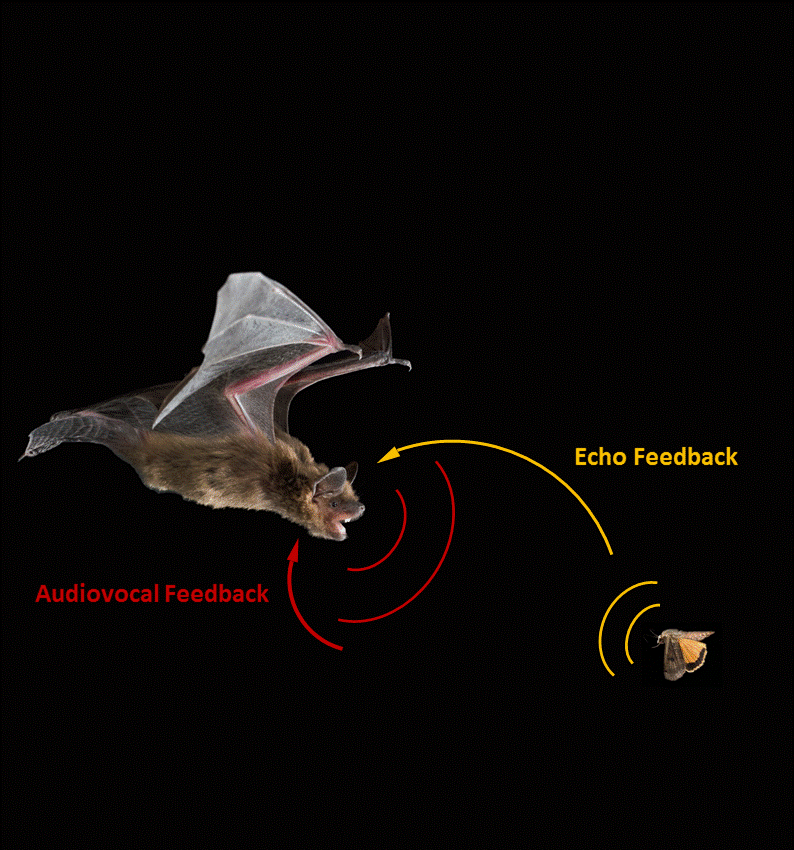
蝙蝠夜间飞行的秘密

极氪 001 配置有前后各 6 共 12 颗超声波雷达
用于车载前装的超声波雷达的主要生产生有国外的 BOSCH、Valeo、Denso、Murata 等,国内厂商主要有通知电子、航盛电子、德赛西威等。
03.激光雷达
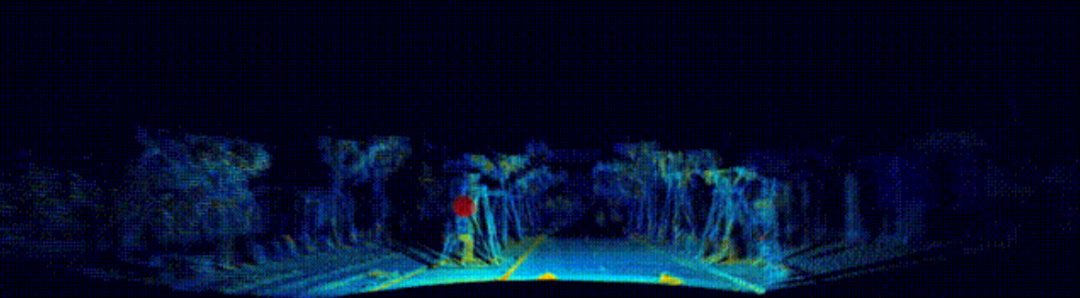
激光雷达成像
根据扫描方式的不同,激光雷达可以分为机械式、半固态、固态三种。

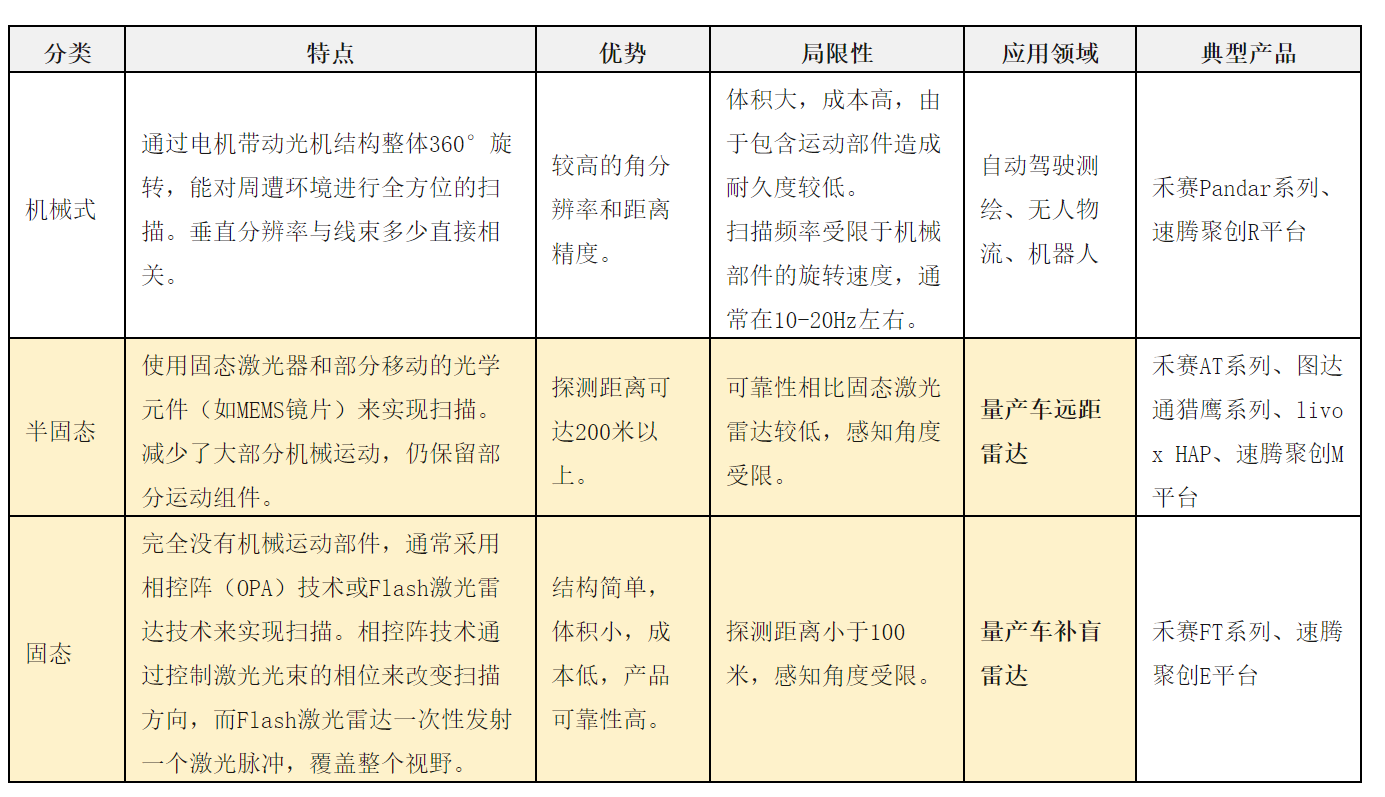
在乘用车领域,机械式激光雷达综合考虑成本、体积、耐用性、量产能力等因素,并不是前装搭载的良品。通常车企会采用半固态激光雷达作为远距主雷达+固态雷达作为补盲雷达的组合方案来实现全景感知。中高端车型平均单车搭载 1 至 3 颗激光雷达。激光雷达的搭载数量也成了智能车型进行装备竞赛的排头兵。
近年来,搭载国产激光雷达的车型爆发式发布,打破了以往由 Velodyne()、Valeo、Luminar、Innoviz 等国外厂商主导的市场格局,国产厂商市场份额迅速飙升。目前何赛科技、速腾聚创、华为、图达通四家国产厂商合计市占率已超过 97%。但其实激光雷达的上游部件,如发射模块、扫描模块、接收模块、光学元件等仍由海外厂商主导地位。
04.毫米波雷达
车载毫米波雷达当前主要以工作频率进行分类,主要集中在 24GHz、60GHz、77GHz、79GHz,这些工作频段并非单纯的由 OEM 或者零部件供应商控制,而是由专门对应的国家法规。一般来说,前向雷达会采用频段为 77GHz 的产品,这种雷达波长更短,探测范围可达近 200m,因此特别适合装在前保险杠内,实现前向跟车、碰撞预警。而角雷达则通常采用波长相对较长的 24GHz 雷达,它的探测距离相对较短,主要用于感知车辆周围的障碍物,监测视觉盲区内的移动物体。

前向毫米波雷达
目前,从整个毫米波雷达的市场来看,大陆、博世、电装、安波福等国外厂商占据着绝大部分市场份额,特别是前向雷达这种对功能安全等级要求很高的产品,其射频芯片目前业内主要由英飞凌、NXP、TI 主导,DSP 主要由飞思卡尔、英飞凌、意法半导体等厂商主导,国产化进程缓慢。
05.V2X
V2X(Vehicle to Everything)是依靠无线通信技术进行驾驶环境感知的一种手段,类似于给道路和车辆都安装了一套对讲系统,让所有的交通参与者都可以实时进行对话。根据实现场景的不同,现在主要应用了广播、多播、单播这三种途径进行 V2X 通信:
广播——目前主要的通信模式。道路和车辆均通过无线广播的方式以不 10Hz 左右的频率(具体频率根据不同的消息类型略有区别)向周围 500 米范围内的所有交通参与者广播自己的状态信息,车辆接收到这些海量信息以后,经过分类筛选,只保留与本车相关的关键信息,经过算法运算后,可以判断出更佳的行驶方式和潜在的安全风险;
多播——是指发送终端有确定的目标接受终端组,明确知道哪些车辆属于组内成员,这种通信模式典型的应用场景是车辆编队行驶;
单播——工作流程类似于我们打电话的过程,包括单播链路建立、链路更新和链路释放过程。
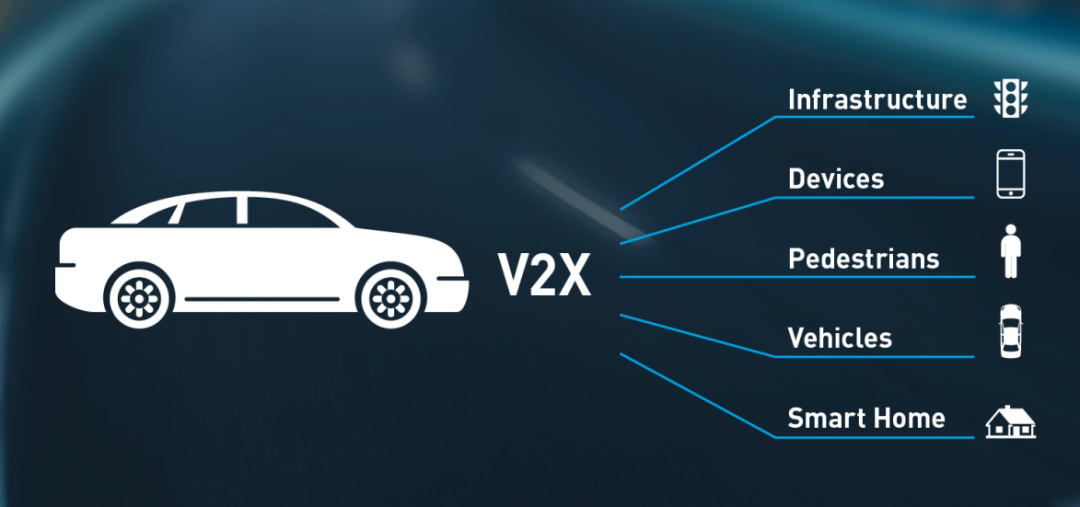
V2X:车联万物
V2X 最大的优势在于,它可以让车辆提前感知到被遮挡的潜在危险,这是无论哪种雷达和摄像头都无法实现的功能。不过,局限性也是显而易见的,V2X 技术价值的体现强依赖于终端安装渗透率,只有当绝大多数道路和车辆都装有终端设备时,各种预想的场景才能够实现。就好比,只有家家户户都装了电话,电话的存在才有意义。
现在中国的 V2X 技术的成熟度和应用水平已经走到了世界的最前列,国内产业生态环境也愈发完善,华为、中信科智联、中兴、星云互联等大厂作为业内主导企业已经开始深度参与到全球产业推动的工作中。
总结
多源感知融合的前提是各个传感器之间的标定,保证不同传感器识别的数据可以映射到同一个时空参考坐标系中。在标定准确之后,融合一般有两种方式:前融合和后融合。
前融合,是指各个传感器直接将采集到的包括图像、点云、无线消息等原始数据全部集中到一个大算力核心处理上,由处理器进行原始数据匹配综合、分析提取,最终输出融合感知结果。但这样的方式计算量巨大,对原始数据格式和数据质量也有着非常高的要求。而后融合则是更多的把大量的原始数据处理过程分散在感知设备端,由设备供应商自带的算法进行本数据源的分析处理,将多个传感器对同一目标的最终感知结果在整车域控制器的核心处理器中进行匹配决策。
举例来说,蔚来汽车的 AQUILA 超感系统,配置了 33 个感知硬件,包括 1 个超远距高精度激光雷达、7 颗 800 万像素高清摄像头、4 颗 300 万像素高感光环视专用摄像头、1 个增强主驾感知、5 个毫米波雷达、12 个超声波传感器、2 个高精度定位单元和 1 套 V2X 系统。极狐阿尔法 S() HI 先行版 PRO 则配置了 3 颗激光雷达,感知设备总量达到了 34 颗,宣称可以实现 99.9%的障碍物识别率。
转载自公众号:焉知汽车
原文链接:https://mp.weixin.qq.com/s/7LztMO33D0CT2jZfhLoR1w

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)