
功能概述
环视4V解串器直接接到main域,mcu访问main域i2c、gpio、lpwm,对camera sensor、serdes以及lpwm进行初始化,完成环视的快速出图。
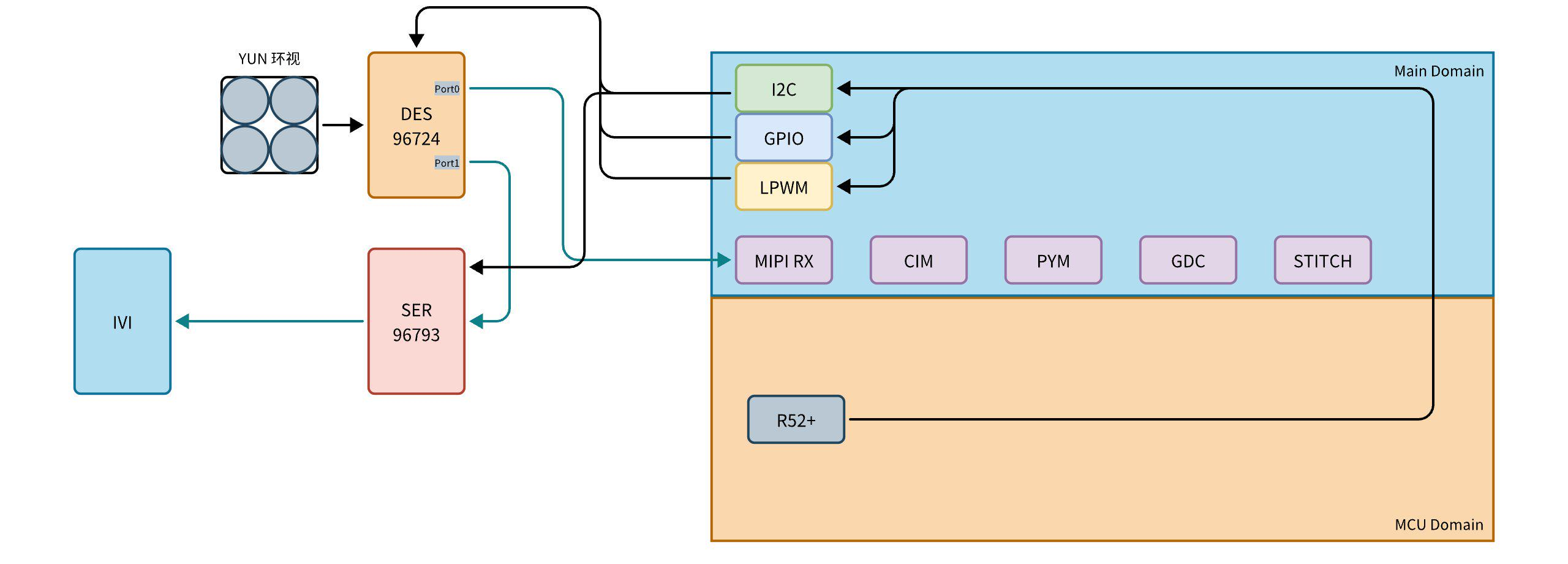
mcu启动后,会在mcu task中调用Camera_Init接口,完成camera sensor、serdes以及lpwm的配置,并使能数据流,数据会通过加串器bypass给IVI。
Camera_Init中会先检查AonSram中当前需要配置的camera通路是否working,如果working状态,接口将直接退出,当检查flag为非working状态时,会将需要使能通路flag设置为working,并开始初始化环视,并使能数据流bypass给IVI。
mcu编译
mcu camera bypass参考方案相关实现在mcu/Service/Camera目录下。
├── inc
│ ├── camera_common_gpio.h
│ ├── camera_common_i2c.h
│ ├── camera_common_lpwm.h
│ ├── Camera_PreInit.h
│ ├── Camera_Setting.h
│ └── Camera_Sub.h
├── SConscript
└── src
├── Camera_Autosar.c
├── camera_common_lpwm.c
├── Camera_PreInit.c
├── camsys_common_gpio.c
├── camsys_common_i2c.c
└── I2c_Operation.c
由于mcu调试环境不适合camera sensor & serdes的调试工作,所以camera sensor & serdes的调试需要在acore侧进行,由acore完成camera sensor & serdes调试,调试完成后通过libcam提供的setting dump命令得到setting文件,如camdump-hbn_camera_test-608660-639939578641.log.i2c。
在开发板执行如下命令,会在/log/camera目录下得到dump的setting文件:
# 创建默认dump目录:
mkdir -p /log/camera
# 关闭诊断功能:
export CAM_DIAG_DISABLE=1
# 关闭内参预读功能:
export CAM_IPARAM_MODE=1
# 打开debug功能,不打印,但正常初始化并(开流完)后dump到文件: 同时i2c源记录
export CAM_DEBUG_LEVEL=0x2201
# 打开debug功能,不打印,但正常初始化完(不开流)后dump到文件: 同时i2c源记录
export CAM_DEBUG_LEVEL=0xa01
# 运行相应的配置,如: RX4/96724 4V环视 HK ISX031
/app/testcase/S10_Camera/testsuite/scripts/hbn_camera_test.sh 4v_yuv_cim0_ddr_1536p_isx031 config_HK_F196P1_MAX96724 R4
# 或: RX4/96724 4V环视 SENSING ISX031
/app/testcase/S10_Camera/testsuite/scripts/hbn_camera_test.sh 4v_yuv_cim0_ddr_1536p_isx031 config_SENSING_F190S0T7_MAX96724 R4
在得到dump的setting文件后,地平线提供工具Camera_Setting_Tools对dump的setting文件进行解析,进而得到mcu侧可用的Camera_Setting.h文件。
./Camera_Setting_Tools camdump-hbn_camera_test-23984-48446987219.log.i2c

Camera_Setting.h文件中包含i2c bus、i2c寄存器、gpio操作、延时等,完全复用acore执行侧时序进行初始化。
Camera_Setting.h中的结构:
typedef struct {
uint8_t bus; // i2c bus num
uint8_t i2c_addr; // i2c addr, exception:(i2c_addr \| alen \| dlen) = 0 for gpio
uint8_t i2c_op; // read/write/sleep
uint8_t alen; // i2c reg addr length, exception:(i2c_addr \| alen \| dlen) = 0 for gpio
uint8_t dlen; // i2c reg val length, exception:(i2c_addr \| alen \| dlen) = 0 for gpio
uint32_t reg_addr; // i2c reg addr or gpio
uint32_t value; // i2c reg value or gpio val
uint32_t time_us; // i2c timestemp
uint32_t delay_us; // i2c timestemp
} cam_i2c_info_t;
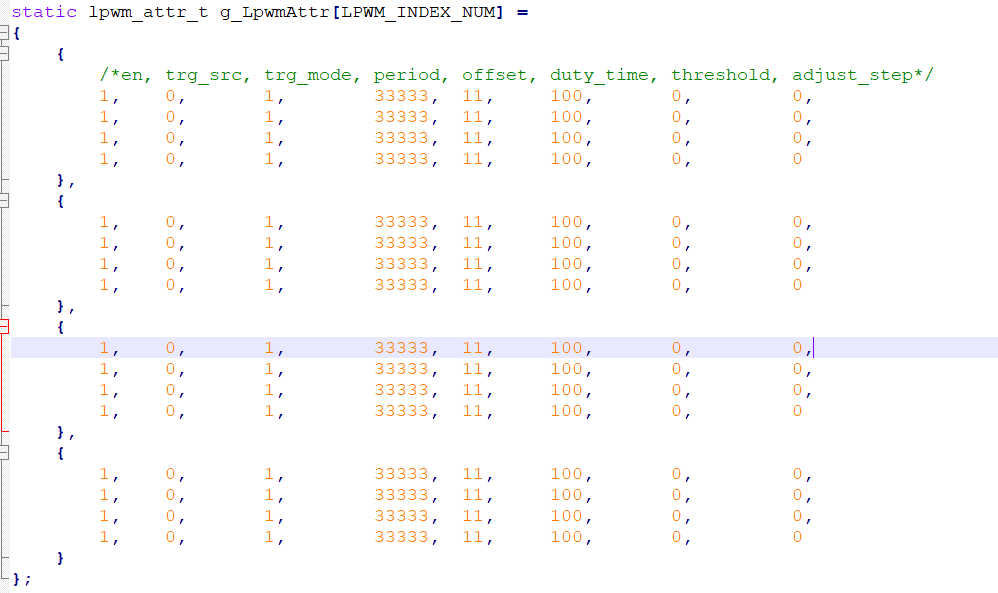
lpwm的配置在camera_common_lpwm.c文件中,根据需要配置lpwm参数,将参数填入g_LpwmAttr的初始化。
由于该参考方案需要mcu跨域访问i2c & ioext,而默认mcu侧不一定配置了main域的i2c & ioext,所以需要确认需要访问的i2c bus以及gpio是否需要额外配置,如果需要额外配置,需要对i2c以及ioext的Config进行修改,并在Camera_PreInit.c中增加适配,并在mcu HorizonTask.c中I2c_Init()之前调用Camera_PreInit.h中提供的Camera_PreInit()接口。
I2c配置matrix A参考修改:
mcu/Config/McalCdd/gen_matrix_A/I2c/inc/I2c_PBcfg.h
将#define I2C_CONFIG_CHANNEL (4U)定义修改为#define I2C_CONFIG_CHANNEL (10U)。
#define I2C_CONFIG_CHANNEL (10U)
mcu/Config/McalCdd/gen_matrix_A/I2c/src/I2c_PBcfg.c
将I2cConfig[4]初始化修改为I2cConfig[10],并进行初始化。
const I2c_ConfigType I2cConfig[10] =
{
{
I2cHwChannel0,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_FAST_MODE,
0
},
{
I2cHwChannel1,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_FAST_MODE,
0
},
{
I2cHwChannel2,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_FAST_MODE,
0
},
{
I2cHwChannel3,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_FAST_MODE,
0
},
{
I2cHwChannel4,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_FAST_MODE,
0
},
{
I2cHwChannel5,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_FAST_MODE,
0
},
{
I2cHwChannel6,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_STANDARD_MODE,
0
},
{
I2cHwChannel7,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_STANDARD_MODE,
0
},
{
I2cHwChannel8,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_STANDARD_MODE,
0
},
{
I2cHwChannel9,
MASTER_MODE,
ADDRESS_7_BITS,
I2C_STANDARD_MODE,
0
},
};
ioext配置matrix A参考修改:
mcu/Config/McalCdd/gen_matrix_A/IoExt/inc/TCA9539_Cfg.h
增加acore tca9539拓展io i2c bus定义
#define TCA9539_ACORE_I2C_CHANNEL 5U
TCA9539_DEVICE中增加参数TCA9539_DEVICE2
typedef enum
{
TCA9539_DEVICE0 = 0,
TCA9539_DEVICE1 = 1,
TCA9539_DEVICE2, // add for acore TCA9539
TCA9539_DEVICE_MAX
} TCA9539_DEVICE;
mcu/Config/McalCdd/gen_matrix_A/IoExt/src/TCA9539_Cfg.c
TCA9539_DeviceMapping增加{TCA9539_ACORE_I2C_CHANNEL, 0x74u}参数
const TCA9539_DeviceMappingType TCA9539_DeviceMapping[TCA9539_DEVICE_MAX] =
{
{TCA9539_0_I2C_CHANNEL, 0x74u}, /* Device 0 */
{TCA9539_0_I2C_CHANNEL, 0x75u}, /* Device 1 */
{TCA9539_ACORE_I2C_CHANNEL, 0x74u}, /* Device acore */
};
TCA9539_RegRecord增加{{0u, 0u}, {0xFFu, 0xFFu}, {0u, 0u}, {0xFFu, 0xFFu}参数
TCA9539_RegRecordType TCA9539_RegRecord[TCA9539_DEVICE_MAX] =
{
{
{0u, 0u},
{TCA9539_0_OUTPUT_LEVEL_0, TCA9539_0_OUTPUT_LEVEL_1},
{TCA9539_0_POLORITY_INVERSION_0, TCA9539_0_POLORITY_INVERSION_1},
{TCA9539_0_CONFIGURATION_0, TCA9539_0_CONFIGURATION_1}
},
{
{0u, 0u},
{TCA9539_1_OUTPUT_LEVEL_0, TCA9539_1_OUTPUT_LEVEL_1},
{TCA9539_1_POLORITY_INVERSION_0, TCA9539_1_POLORITY_INVERSION_1},
{TCA9539_1_CONFIGURATION_0, TCA9539_1_CONFIGURATION_1}
},
{
{0u, 0u},
{0xFFu, 0xFFu},
{0u, 0u},
{0xFFu, 0xFFu}
},
};
在生成完Camera_Setting.h并配置好g_LpwmAttr后以及适配完i2c&ioext后,
将Camera_PreInit()函数放在mcu初始化任务中,注意要在I2c_Init(NULL_PTR)之前。
将Lpwm_Ops(0, 0)和Camera_Init()放在task中只执行一次,就可以编译mcu镜像了。
注:
1.如果是解串器接到switch并分别接到mcu侧i2c bus和acore i2c bus,需要将解析后的Camera_Setting.h文件中bus替换成mcu侧对应bus,且不需要对I2c_PBcfg以及IoExt_PBcfg进行额外适配修改。
2.Camera_Setting_Tools工具可在mcu工程mcu/Tools/mcu_camsys_tools目录找到。
soc侧配置修改
soc侧在环视4V快起时,需要在hb_j6dev.json中deserial的配置添加"flags":"0x20",表示打开环视4V快起功能。
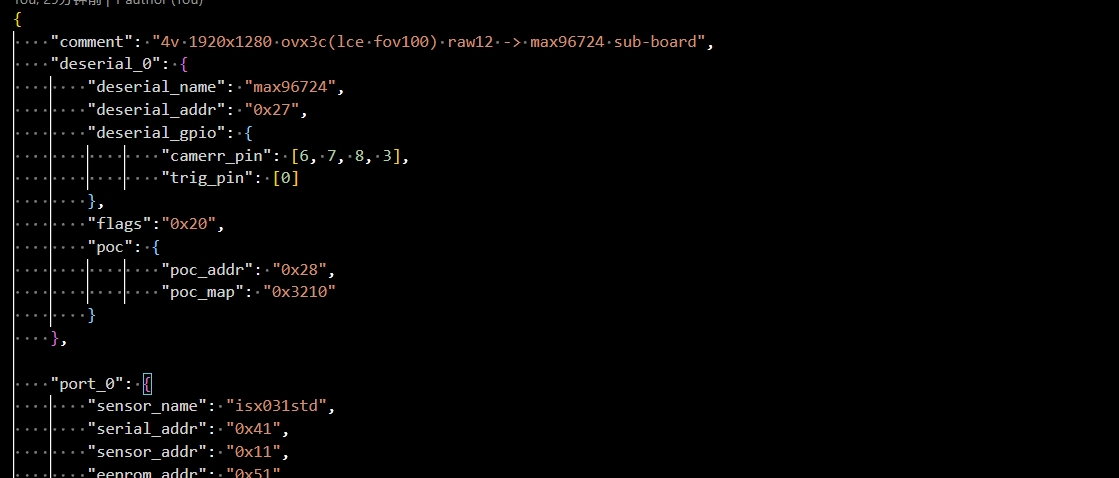
打开该功能后,soc在初始化时,会通过i2c读取deserial的0x108寄存器判断是否mcu已经开流。
如果mcu已经开流,soc侧会跳过deserial、sensor的上电及初始化配置。
如果mcu未开流,soc侧会对deserial、sensor进行正常的上电及初始化配置。
mcu侧运行
mcu启动后,通过i2cdetect确认检查camera 设备被扫到。
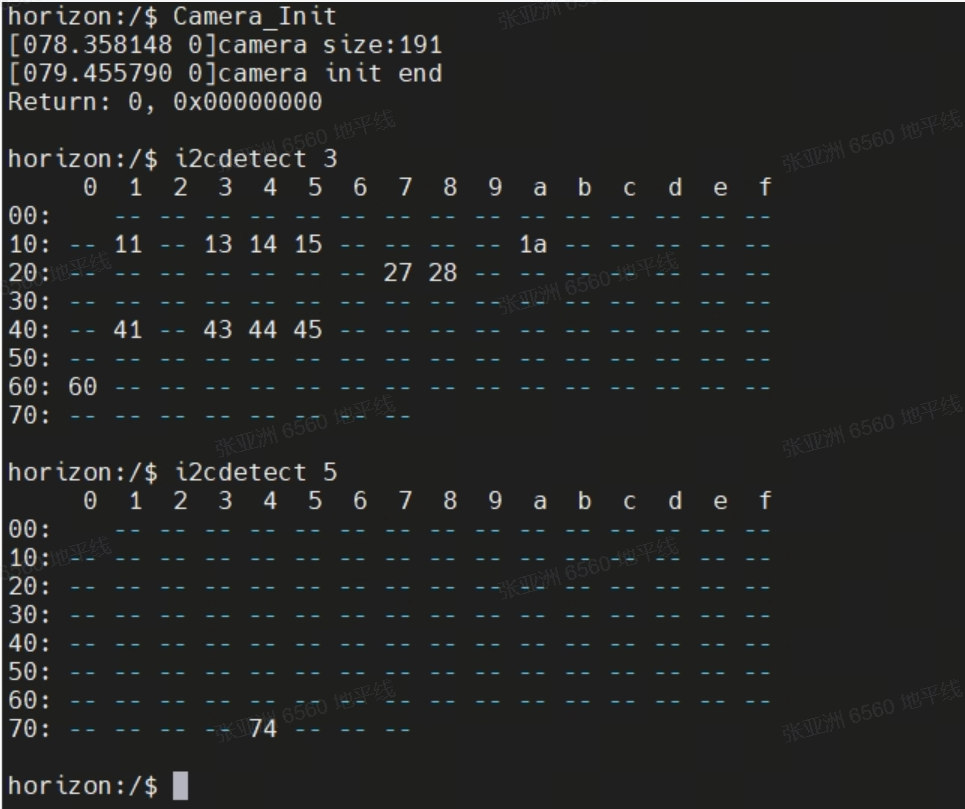
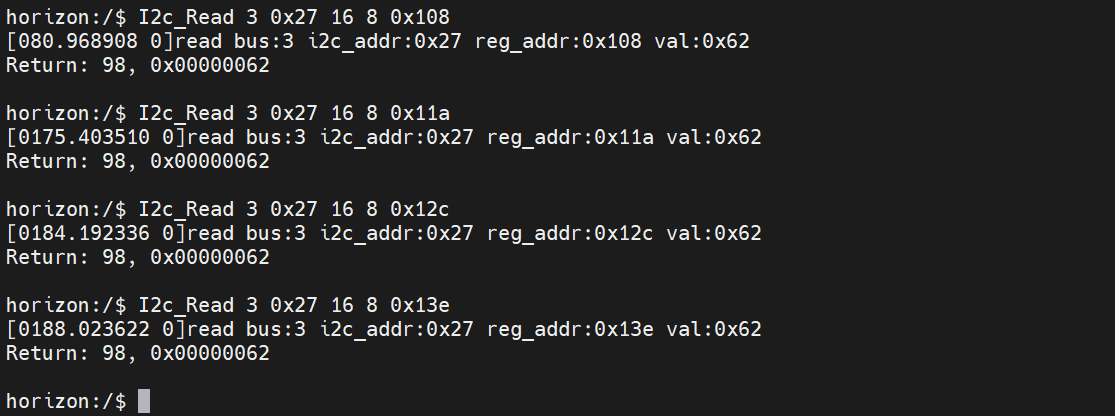
确认是否出流可以通过加串器出流寄存查看:I2c_Read 3 0x27 16 8 0x108
soc侧运行
soc侧可通过以下命令打开环视4V,进行测试验证。
/app/sample/S83_Sample/S83E04_Module/camera_sample/scripts/camera_sample.sh matrix 4V_4xISX031_RX4_HK_SYNC t33554432
deserial判断mcu是否已经初始化:

sensor判断mcu是否已经初始化:

soc侧也可通过以下命令打开3V,进行测试验证。
/app/sample/S83_Sample/S83E04_Module/camera_sample/scripts/camera_sample.sh matrix 3V_2xOVX8B_1xOVX3C_RX0

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)