写在前面:
关于OE包内参考算法的使用,地平线已经释放了大量文档指导用户完成各类模型的训练、校准、量化、定点过程,但其中有些细节可能会对不是特别熟悉算法工具链的客户造成困扰,本文档致力于消除参考算法使用过程中所有可能存在的模糊操作,引导初学者快速上手参考算法,在实操中树立信心、激发学习兴趣。
1 环境部署
1.1 开发机准备
为了顺利地使用工具链,地平线建议您选择的开发机应满足以下要求:
硬件/操作系统要求CPUCPU I3以上或者同级别E3/E5的处理器内存16G或以上级别GPUCUDA11.8、驱动版本Linux:>= 510.39.01*
(推荐驱动版本Linux:520.61.05)
适配显卡包括但不限于:
1. GeForce RTX 3090
2. GeForce RTX 2080 Ti
3. NVIDIA TITAN V
4. Tesla V100S-PCIE-32GB
5. A100系统原生Ubuntu 22.04
1.2 Docker容器部署
地平线要求的Docker基础环境如下,请提前在您的宿主机上完成安装:
- Docker(20.10.10或更高版本,建议安装20.10.10版本),详见 Docker安装手册 。
- NVIDIA Container Toolkit(1.13.5或更高版本,建议安装1.15.0),详见 NVIDIA Container Toolkit安装手册。
完成Docker基础环境安装后,还需要将无root权限的用户添加到Docker用户组中。参考命令如下:
拉取docker镜像,并下载OE开发包,将OE开发包和Nuscenes数据集挂载到docker容器中。参考命令如下:
注意,“--gpus”参数一定要设置为all,代表着在容器内能使用开发机所有的GPU,“--shm-size”一定要修改,不然默认共享内存仅为64MB。
2 数据集准备
2.1 数据集下载
Full dataset(v1.0)包含多个子数据集,如果不需要进行v1.0-trainval数据集的浮点训练和精度验证,可以只下载v1.0-mini数据集进行小场景的训练和验证。
2.2 Full dataset版本数据集打包和meta文件夹构建
2.2.1 数据集打包
将下载完成的v1.0-trainval01_blobs.tar~v1.0-trainval10_blobs.tar、nuScenes-lidarseg-all-v1.0.tar.bz2、v1.0-trainval_meta.tar、nuScenes-map-expansion-v1.3.zip和can_bus.zip进行解压,解压后的目录如下所示:
打包结束生成目录如下所示。
--src-data-dir为解压后的nuscenes数据集目录;
--target-data-dir为打包后数据集的存储目录;
--version 选项为["v1.0-trainval", "v1.0-test", "v1.0-mini"],如果进行全量训练和验证设置为v1.0-trainval,如果仅想了解模型的训练和验证过程,则可以使用v1.0-mini数据集;v1.0-test数据集仅为测试场景,未提供注释。
全量的nuscenes数据集较大,打包时间巨长,如果仅仅作为学习使用mini版就好。
2.2.2 meta文件夹构建
- 在tmp_data/nuscenes 下创建meta文件夹,如果使用--version = "v1.0-mini",将解压后的v1.0-mini文件夹拷贝到tmp_data/nuscenes/meta 文件夹内,如果使用--version = "v1.0-trainval",将解压后的v1.0-trainval文件夹拷贝到tmp_data/nuscenes/meta 文件夹内;
- 将解压后的maps文件夹拷贝到tmp_data/nuscenes/meta 文件夹内;
- 将解压后的lidarseg文件夹拷贝到tmp_data/nuscenes/meta 文件夹内。
如果使用--version = "v1.0-trainval",此时tmp_data的目录结构为:
2.3 Mini dataset版本数据集打包和meta文件夹构建
如果需要使用mini数据集,在BEVFormer对应的config文件"bevformer_tiny_resnet50_detection_nuscenes"中,需要更改以下配置:
float_trainer/predictor、calibration_trainer/predictor、qat_trainer/predictor、int_infer_predictor/int_infer_trainer的version:数据集的版本,选项为["v1.0-trainval", "v1.0-test", "v1.0-mini"],选择"v1.0-mini"。
2.3.1 数据集打包
如果下载的是Full dataset(v1.0)中的Mini、CAN bus expansion和Map expansion(v1.3)、nuScenes-lidarseg这四个项目下的文件,将下载完成的v1.0-mini.tgz、nuScenes-lidarseg-all-v1.0.tar.bz2、nuScenes-map-expansion-v1.3.zip和can_bus.zip进行解压,解压后的目录如下所示:
打包结束生成目录如下所示。
--src-data-dir为解压后的nuscenes数据集目录;
--target-data-dir为打包后数据集的存储目录;
--version 选项为["v1.0-trainval", "v1.0-test", "v1.0-mini"],如果进行全量训练和验证设置为v1.0-trainval,如果仅想了解模型的训练和验证过程,则可以使用v1.0-mini数据集;v1.0-test数据集仅为测试场景,未提供注释。
全量的nuscenes数据集较大,打包时间巨长,如果仅仅作为学习使用mini版就好。
2.3.2 meta文件夹构建
- 在tmp_data/nuscenes 下创建meta文件夹,如果使用--version = "v1.0-mini",将解压后的v1.0-mini文件夹拷贝到tmp_data/nuscenes/meta 文件夹内,如果使用--version = "v1.0-trainval",将解压后的v1.0-trainval文件夹拷贝到tmp_data/nuscenes/meta
- 将解压后的maps文件夹拷贝到tmp_data/nuscenes/meta 文件夹内;
- 将解压后的lidarseg文件夹拷贝到tmp_data/nuscenes/meta 文件夹内。
如果使用--version = "v1.0-mini",此时tmp_data的目录结构为:
3 权重文件准备
如果想完整复现BEVFormer模型的训练、校准、量化、定点过程,可在数据集和Config文件配置完成后,按照第4、5、6部分的指导进行。
4 Config文件配置
config内容较多,对于用户来说,需要关注的主要有以下参数:
device_ids:配置为本机支持的GPU,根据开发环境进行配置;
ckpt_dir:权重路径配置;
data_rootdir:打包数据集路径配置;
meta_rootdir:meta文件所在的路径;
float_trainer/predictor、calibration_trainer/predictor、qat_trainer/predictor、int_infer_trainer/int_infer_predictor的checkpoint_path:权重路径配置;
float_trainer/predictor、calibration_trainer/predictor、qat_trainer/predictor、int_infer_predictor/int_infer_trainer的version:数据集的版本,选项为["v1.0-trainval", "v1.0-test", "v1.0-mini"]。
上述checkpoint_path和version需要根据数据集的版本和使用需求修改。
5 浮点模型训练和精度验证
5.1 浮点模型训练
config文件中的参数配置完成后,使用以下命令训练浮点模型(如果训练浮点模型,需要使用完整数据集而非mini):
float训练后模型ckpt的保存路径为config配置的ckpt_callback中save_dir的值,默认为ckpt_dir。
5.2 浮点模型精度验证
浮点模型训练完成以后,可以使用以下命令验证已经训练好的浮点模型精度:
验证完成后,会在终端打印浮点模型在验证集上检测精度,如下所示:
6 模型量化和编译
6.1 Calibration
模型完成浮点训练后,便可进行 Calibration。calibration在forward过程中通过统计各处的数据分布情况,从而计算出合理的量化参数。 通过运行下面的脚本就可以开启模型的Calibration过程:
6.2 Calibration 模型精度验证
Calibration完成以后,可以使用以下命令验证经过calib后模型的精度:
验证完成后,会在终端输出calib模型在验证集上检测精度。
6.3 量化模型训练
Calibration完成后,就可以加载calib权重开启模型的量化训练。 量化训练其实是在浮点训练基础上的finetue,具体配置信息在config的qat_trainer中定义。量化训练的时候,初始学习率设置为浮点训练的十分之一,训练的epoch次数也大大减少。和浮点训练的方式一样,将checkpoint_path指定为训好的calibration权重路径。
通过运行下面的脚本就可以开启模型的qat训练:
6.4 量化模型精度验证
Calibration完成以后,可以使用以下命令验证经过calib后模型的精度:
验证完成后,会在终端输出calib模型在验证集上检测精度,格式见2.3。
6.5 导出定点模型
完成量化训练后,便可以开始导出定点模型。可以通过下面命令来导出:
6.6 定点模型精度验证
指定calibration-checkpoint后,通过运行以下命令进行量化模型的精度验证:
qat模型的精度验证对象为插入伪量化节点后的模型(float32);quantize模型的精度验证对象为定点模型(int8),验证的精度是最终的int8模型的真正精度,这两个精度应该是十分接近的。
6.7 量化模型编译
opt为优化等级,取值范围为0~3,数字越大优化等级越高,编译时间更长,但部署性能更好。
compile_perf脚本将生成.html文件和.hbm文件(compile文件目录下),.html文件为BPU上的运行性能,.hbm文件为上板实测文件。
运行后,ckpt_dir的compile目录下会产出以下文件:
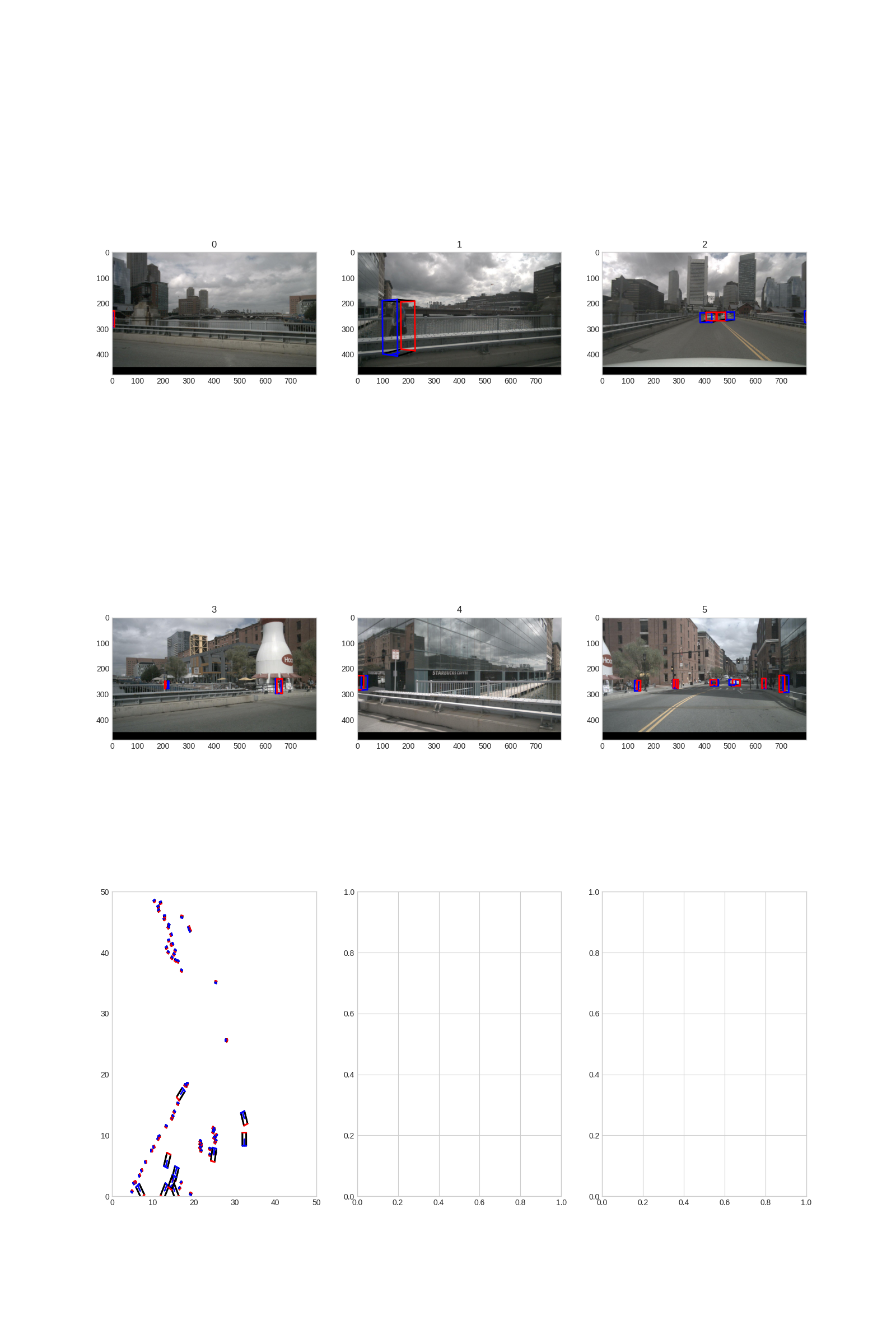
7 模型推理效果可视化
如果你希望可以看到训练出来的模型对于单帧的检测效果,我们的tools文件夹下面同样提供了预测及可视化的脚本,你只需要运行以下脚本即可,可视化结果将会在save-path路径下输出。
imgs为同一时刻下6个相机输出的图片;
其中homo文件夹内的ego2global.npy、ego2img.npy分别是上述图像对应的自车坐标系到世界坐标系、自车坐标系到像素坐标系的homo矩阵,尺寸分别为(4,4)和(6,4,4)。
上述信息可通过一下脚本生成:
可视化示例如下:


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)