
功能概述
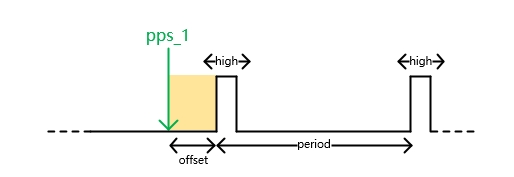
lpwm为信号源用于camsys系统中触发sensor。lpwm本身也需要外界触发,在收到trigger信号后,按照所配置的period、high-time、offset等参数输出1~500KHz、有效电平0~4095us、默认精度为1us的方波给到sensor,驱动sensor进行同步出图,下图展示了sensor出图的完整过程。
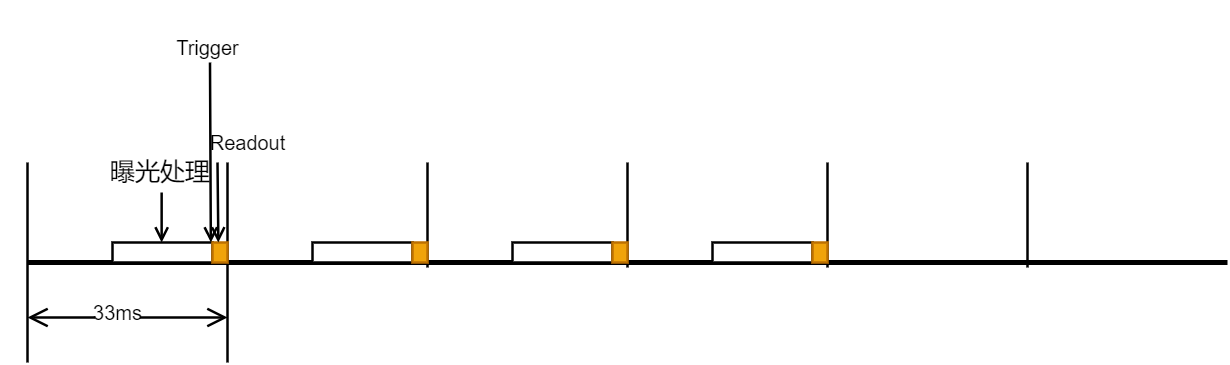
sensor在收到lpwm的trigger信号后,开始曝光出图,这并不代表着曝光时刻与trigger时刻是一致的,具体还需要看sensor的触发机制。
readout同步是出图的时间戳一致,即frame start中断的时间戳和tv值是一致的,但是由于不同型号sensor的曝光处理时间不一致会导致每张图片的内容不是完全一样。
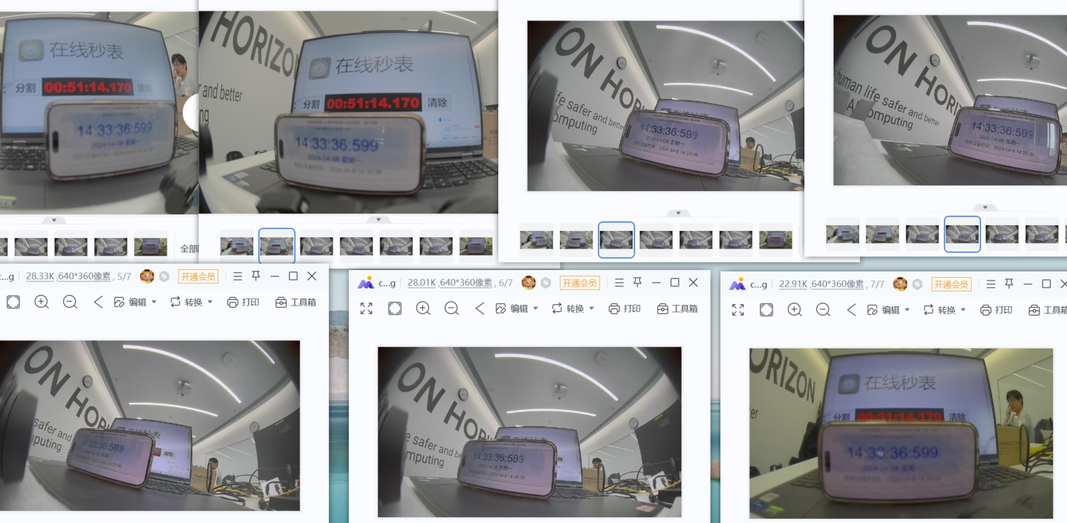
曝光同步是sensor拍屏一致,sensor出图显示的秒表时间是一致的如下图示:
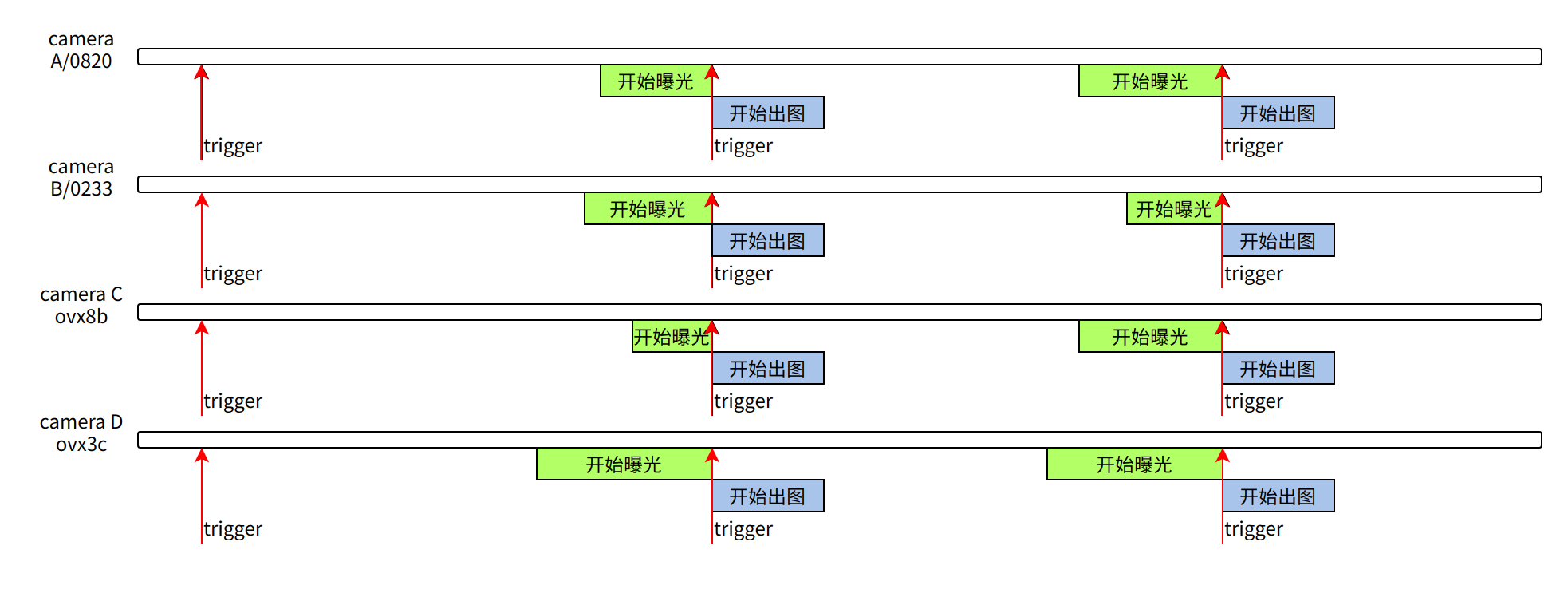
sensor曝光相位差存在两种不同的形式:静态相位差和动态相位差,两种相位差的处理方案是不一致的。
方案实现
静态相位差,表现在不同模组的差别,比如x8b跟x3c的曝光处理时间就不一致,因此这两类模组需要曝光同步时,只需进行静态的偏移即可。
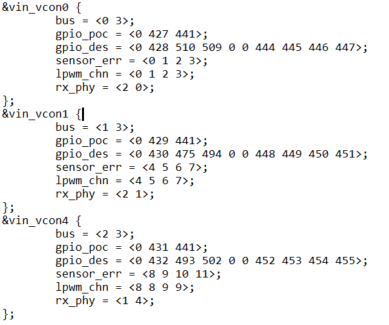
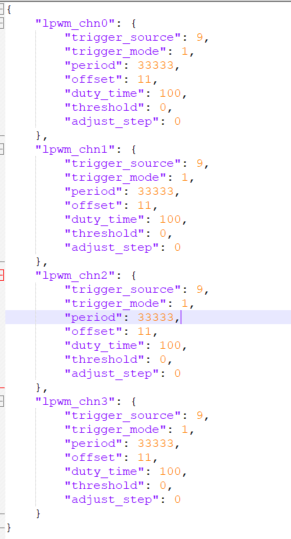
lpwm的配置支持修改每个通道的offset参数,前提该通道硬件支持多lpwm channel,具体的硬件信息可以查看camera dts vcon属性中的lpwm channel信息,如果是不同的channel号,则代表的是独立通道可支持独立配置。
硬件为独立通道时,则可通过调整offset的参数修改不同sensor的readout时间,从而使得不同类型sensor的曝光时间一致。

最后通过修改lpwm.json的offset值进行统一配置即可。
动态相位差,表现为同一组模组之间存在一定的相位偏移,而这个偏移值一般存储在sensor的eeprom中,需要通过接口的方式来实现。
实现方案:
1.sensor驱动获取相位差信息,与默认配置的default值进行相加处理。
2.通过对应的api传递给lpwm进行动态配置。
3.api接口参数:port代表的实际的camera通道,lpwn chn是对应的camera通道,lpwm_dynamic_t则是对应的lpwm属性参数。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)