
1. 引言
在 3D 标注场景中,我们经常需要从 2D 图片中找到目标物,对应在 3D 点云中的位置。这可以帮助我们更准确地标注 3D 点云中的物体、场景等信息,从而为后续的 3D 识别、重建等任务提供更多的信息,同时降低标注成本,提高标注准确率和效率。
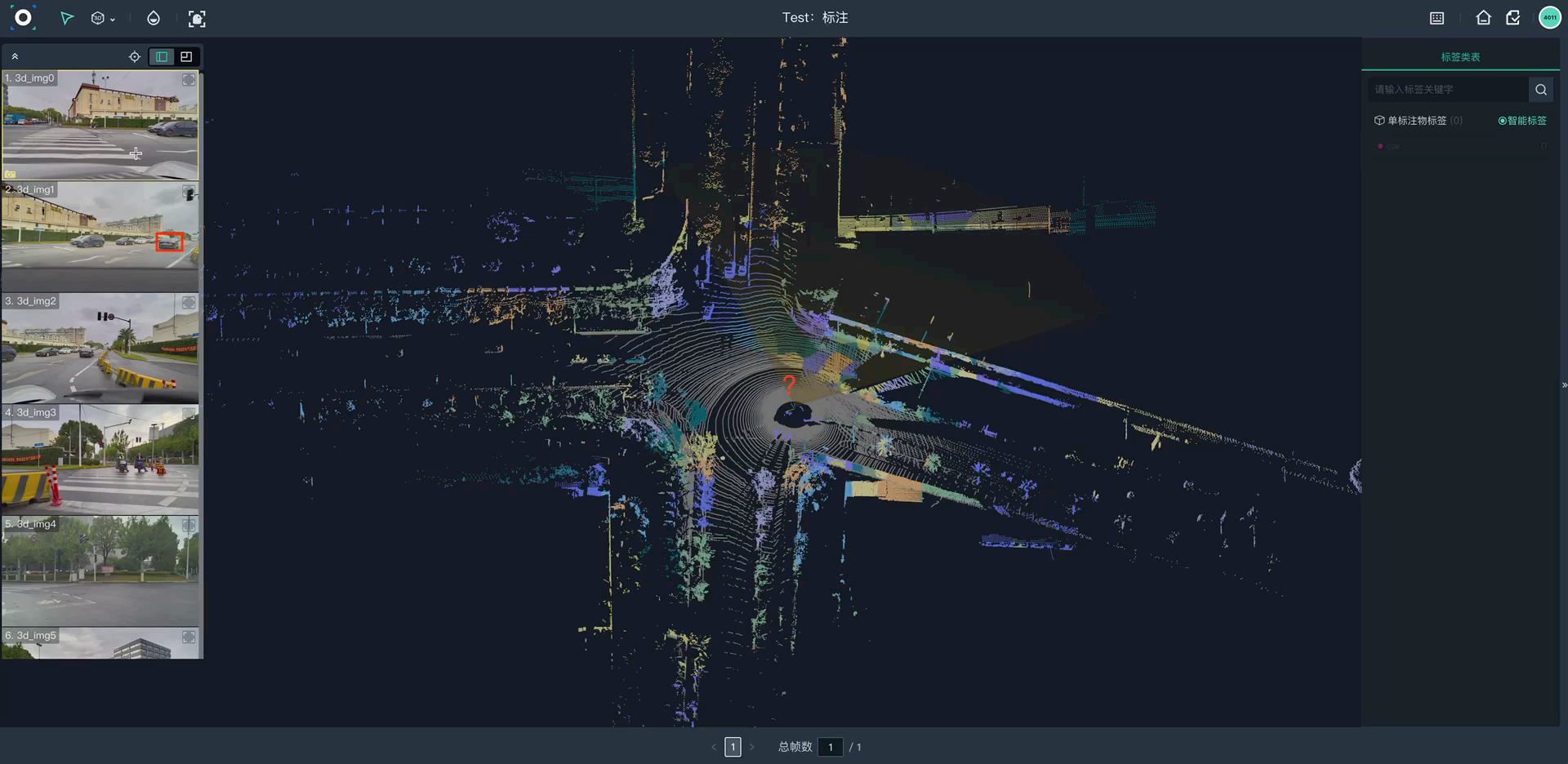
本文档将介绍如何从 2D 图片中找到在 3D 点云中的位置,包括确定图片在3D点云中的照射范围和在2D图片中找到的像素点在3D点云中的位置,这两个部分。
2. 从2D图片找到3D点云中位置的数学背景
在理解从2D图片找到3D点云中的位置的过程中,我们需要了解一些基本的数学背景知识。
首先,我们需要明确2D和3D的概念。2D(二维)指的是具有两个维度的空间,通常是指平面上的点,可以用x和y坐标来表示。而3D(三维)指的是具有三个维度的空间,通常是指现实世界中的点,可以用x、y和z坐标来表示。
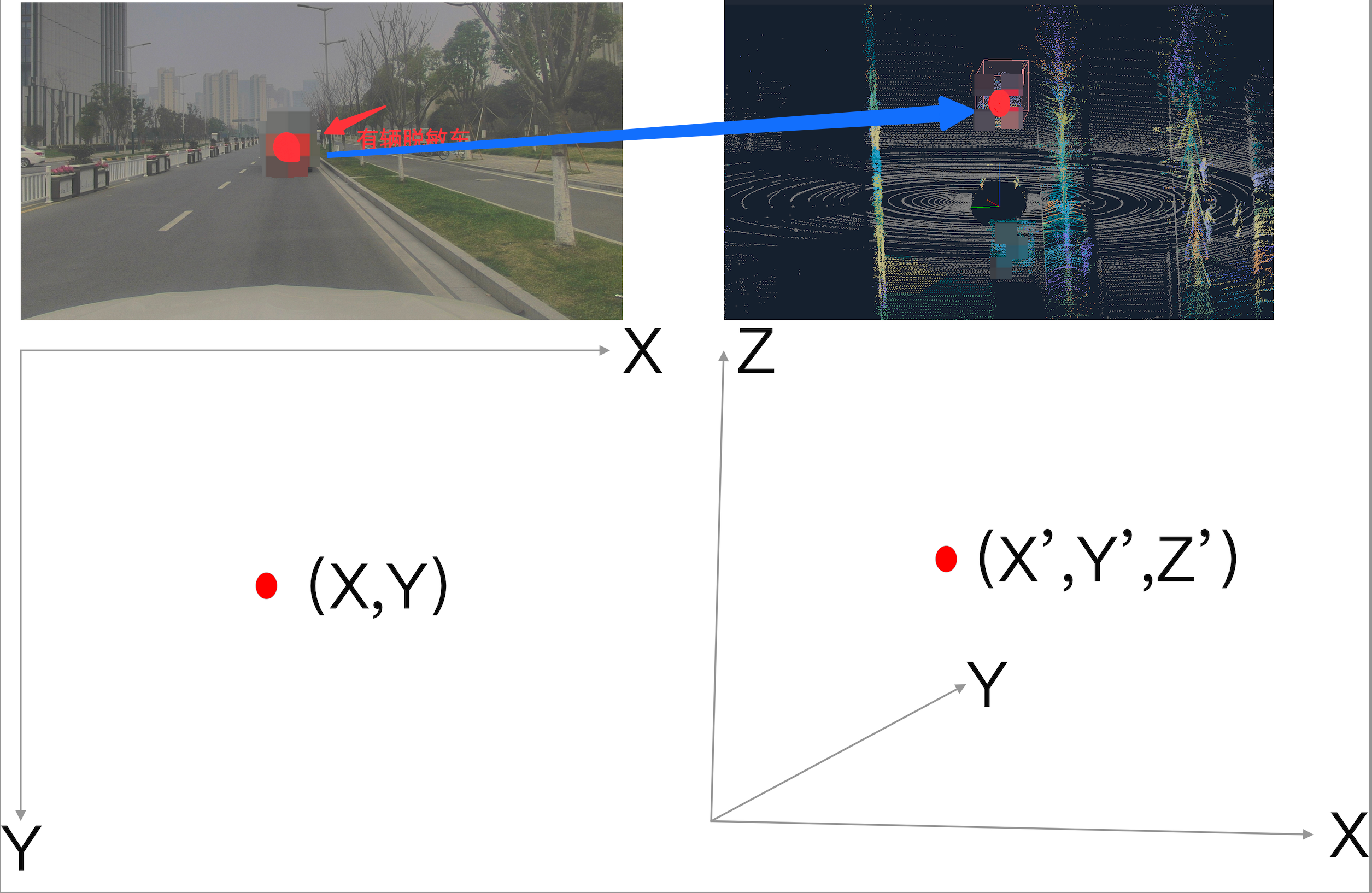
当我们从2D图片中寻找对应在3D点云中的位置时,我们实际上是在进行一个从二维到三维的映射。这种映射具有一定的局限性,因为2D图片只能提供平面上的信息,而无法提供深度信息。这意味着,从2D图片得到的关于3D点云的位置信息只能是若干射线,而非真正的实际范围。
具体来说,当我们观察一个3D场景时,每个像素点实际上对应于一条从相机位置出发的射线。这条射线在3D空间中的位置可以通过相机的内参和外参来确定。然而,由于2D图片无法提供深度信息,我们无法确定这条射线在3D空间中的确切位置。因此,我们只能得到一系列从相机位置出发的射线,这些射线代表了2D图片中的像素点在3D点云中的可能位置。
通过上述数学背景的介绍,我们可以更好地理解从2D图片找到3D点云中的位置的原理和限制。下面具体情况的介绍是假设 3D 点云是基于世界坐标系标定的数据。
3. 确定图片在3D点云中的照射范围
为了更好地理解这一过程,我们可以想象一下在现实生活中的拍照场景。当我们用相机拍摄一个物体时,相机的位置和角度会影响照片的内容和范围。同样地,在3D标注场景中,我们需要确定相机的参数,从而确定2D图片在3D点云中的照射范围。 首先,我们需要了解相机的内参和外参。内参包括相机的焦距、中心坐标等,外参包括相机的位置和姿态。这些参数可以通过相机标定得到。 接下来,我们需要根据相机的内参和外参,计算出图片在世界坐标系下的照射范围。具体步骤如下:
在图像处理中,图片通常被表示为一个像素矩阵,其中每个像素的位置可以通过其所在的行(高度)和列(宽度)来索引。左上角的像素是矩阵的起始点,通常用坐标(1,1)表示,而右下角的像素是矩阵的结束点,其坐标取决于图片的分辨率。例如,一个1024x768分辨率的图片,右下角的像素坐标将是(1023,767)。
相机的内参矩阵包含了相机的焦距、主点坐标等信息,这些参数描述了图像是如何通过相机镜头和传感器转换成数字图像的。当我们有了像素坐标后,可以使用内参矩阵将其转换为相机坐标系中的坐标。这个过程是通过将像素坐标与内参矩阵相乘并考虑像素的深度(通常设为1,因为在2D图像中没有深度信息)来完成的。
相机的外参矩阵包含了相机的位置和姿态信息,这些信息描述了相机相对于某个全局参考坐标系(世界坐标系)的位置和方向。外参矩阵通常包括旋转和平移两部分。一旦我们有了相机坐标系中的坐标,我们可以使用外参矩阵将其转换到世界坐标系中。这个过程是通过将相机坐标系的点与旋转矩阵相乘,然后加上平移向量来完成的。
自此就得到相机在世界坐标系的最大映射的水平范围了。
4. 在2D点云中找到像素点在3D点云中的位置
通过上述的描述,其实已经知道了如何从 2D 图片上的一个具体位置到 3D 点云上的映射射线了。那么如何通过普通技术手段得到这个在这个射线上的具体位置呢?
我们可以通过以下步骤实现:
首先,我们需要根据2D图片上的像素点和相机的内参和外参矩阵,计算出一条从相机位置出发的射线。这条射线代表了该像素点在3D空间中的视线方向。
接下来,我们可以沿着这条射线创建一个圆柱形的过滤器。这个过滤器的形状和大小可以根据需要调整,通常它的长度会设定为点云的最大可能深度,而直径则取决于我们希望定位的精度。
使用这个圆柱形过滤器,我们可以在3D点云中筛选出所有位于射线上的点。这意味着只有那些位于圆柱内部或与圆柱相交的点会被考虑。
一旦我们得到了射线上的点云数据,我们可以计算这些点的分布。这通常涉及到统计每个小段圆柱内点的数量,或者计算点的密度。
在圆柱形过滤器中,点的分布可能不是均匀的。在某些区域,点的密度可能会更高,这表明这些区域在3D点云中更有可能对应于2D图片上的像素点。我们可以通过找到点云分布中的峰值来确定最可能的位置。
通过这种方法,我们可以从2D图片上的一个具体位置得到3D点云中的大致位置。然而,需要注意的是,这种方法有其局限性,例如在点云密度不均匀或者存在遮挡的情况下,可能无法精确确定位置。此外,点云的分辨率和质量也会影响定位的准确性。
5. 总结
从2D图片找到3D点云中的位置是一个复杂的过程,涉及到多个坐标系和参数。通过仔细计算和调试,我们可以实现这一目标,从而为3D点云的应用提供更多可能性。
当然实际应用中,还要考虑 3D 点云的具体渲染情况,要根据实际情况来进行具体分析和应用。
总之,从2D图片找到3D点云中的位置是3D标注场景中的一个重要任务。通过深入研究和不断改进,我们可以为3D点云的应用提供更多的可能性,并为用户带来更好的体验和便利。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)