
一. Ultra-Fast-Lane-Detection-v2 简要介绍
车道线检测是自动驾驶和高级驾驶辅助系统(ADAS)的基本组成部分,用于识别和定位道路上的车道标记。虽然深度学习模型已经取得了巨大的成功,但仍有一些重要和具有挑战性的问题有待解决。
第一个是效率问题。在实际应用中,由于下游任务对检测速度要求较高,在车辆计算设备有限的情况下,车道检测算法被快速执行来提供实时的感知结果。此外,以往的车道检测方法主要基于分割,采用密集的自底向上的学习范式,这导致难以取得较快的运行速度。此外,以往的车道检测方法主要基于分割,采用密集的自底向上的学习范式,这导致难以取得较快的运行速度。
除了效率问题,另一个挑战是无视觉线索问题,车道检测任务是寻找车道的位置,不管车道是否可见。因此,如何处理严重遮挡和极端光照条件下没有可见信息的场景是车道检测任务中的一个主要难点。为了缓解这个问题,能够潜在影响检测结果的额外线索是至关重要的。例如,道路形状、车辆行驶方向趋势、不被遮挡的车道线端点等都有利于检测。为了利用额外线索,通过扩大感受野来利用更多信息对车道检测是可取的。这就提出了一个自然的问题:我们能否找到一种具有大感受野快速且全局的范式用于车道检测任务?基于上述动机,Ultra-Fast-Lane-Detection-v2提出了一个稀疏的自顶向下的范式来解决效率问题和无视觉线索问题。
二. 训练环境安装,验证
请参考链接:https://github.com/cfzd/Ultra-Fast-Lane-Detection-v2/blob/master/INSTALL.md
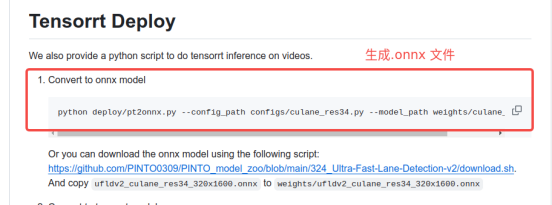
将.pt 模型型转换为ONNX格式
请参考链接: https://github.com/cfzd/Ultra-Fast-Lane-Detection-v2
四. 用地平线工具链完成PTQ量化
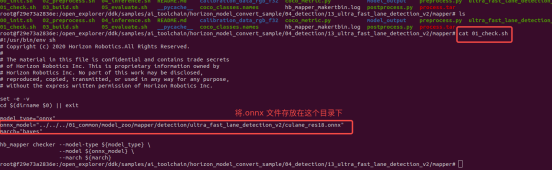
1. 浮点模型准备
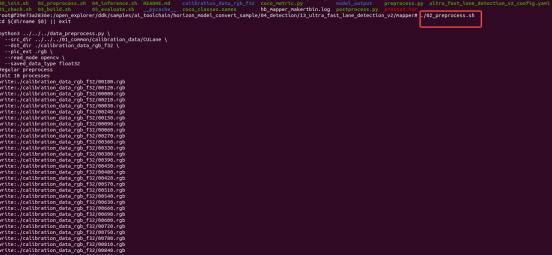
2. 校准数据集准备
从CULane车道线数据集中(数据集百度网盘链接: https://pan.baidu.com/s/1k0VdpN-0lZ4MPlSAuP6zJw?pwd=au8m)选取100份照片作为校准数据:
校准数据存放位置:

运行校准数据预处理脚本:02_preprocess.sh
3. 模型PTQ量化
模型PTQ量化理论:
模型量化就是将浮点存储(运算)转换为整型存储(运算)的一种模型压缩技术。训练深度神经网络时,往往都会使用FP32的数据精度来表示权值、偏置、激活值等。在深度学习模型性能提高的同时,计算也越来越复杂,计算开销和内存需求逐渐增加。 庞大的网络参数意味着更大的内存存储,这极大地限制了在资源受限设备,例如智能手机、智能汽车等上的部署。
训练后量化(Post-Training Quantization,PTQ),PTQ不需要再训练,因此是一种轻量级的量化方法。在大多数情况下,PTQ足以实现接近FP32性能的INT8量化。
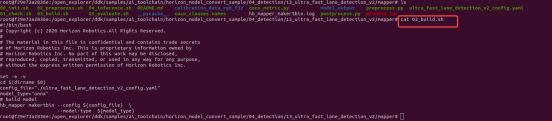
运行脚本完成模型转换:
查看脚本: cat 03_build.sh
 =
= 查看yaml 文件:
运行脚本:./03_build.sh

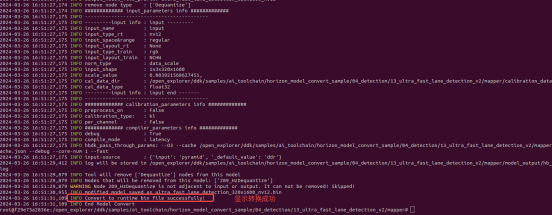
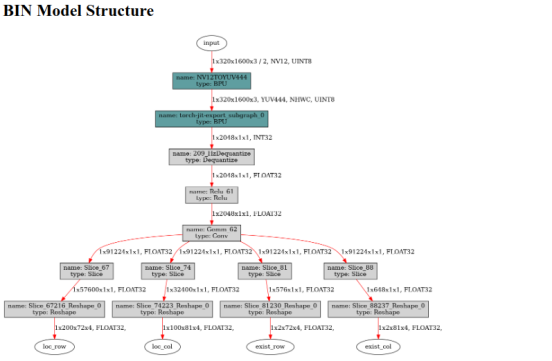
模型转换后产物:

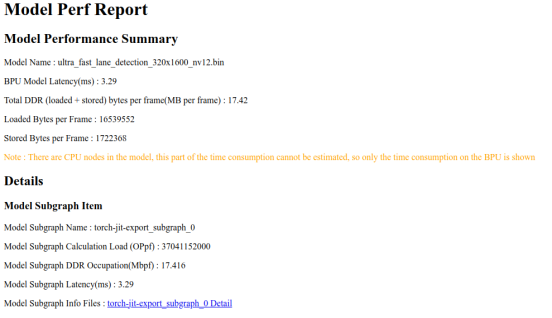
五. 性能分析
静态性能验证,使用hb_perf工具:
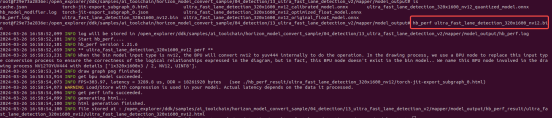
性能分析后产物:

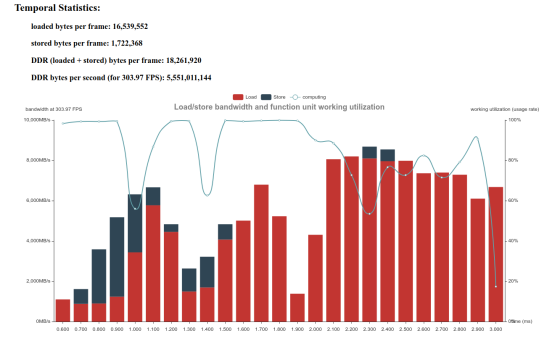
用浏览器打开html文件,可视化性能参数:




'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)