
使用Yolov5训练手势检测
1.手势数据
1.1手势数据集介绍
- hagrid数据集既可以做手的检测任务,还可以做手的图像分类任务。该数据集总大小为716GB,包含552992张rgb图像,图像的分辨率1920x1080,总共有18类静态手势,类别如下:

1.2 手势数据集下载地址
- 下载hagrid数据集,下载地址:
https://github.com/hukenovs/hagrid
1.3 hagrid数据集格式转换
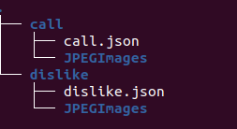
将hagrid里的标签json数据转换成xml标签数据,使用json_xml.py这个脚本代码进行转换。该脚本需要将目录变成下面这种格式存放,call.json是标签,JPEGImages是存放call的图像文件。
2.yolov5环境搭建
- 源码下载地址:https://github.com/ultralytics/yolov5.git
Pytorch:1.6.0
Cuda:10.1
Python:3.7
官方要求Python>=3.8 and PyTorch>=1.6.
通过git clone https://github.com/ultralytics/yolov5.git将YOLOv5源码下载到本地,创建好虚拟环境,并通过pip install -r requirements.txt安装依赖包。配置环境可能遇到Arial字体下载问题,我已经下载了
3.yolov5数据集准备
3.1 将 hagrid数据集转换成voc数据集格式
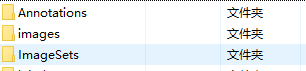
在yolov5目录下创建paper_data文件夹(名字可以自定义),目录结构如下,
示例如下:
- paper_data文件夹下内容如下
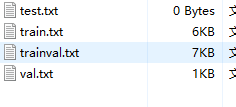
ImageSets文件夹下面有个Main子文件夹,其下面存放训练集、验证集、测试集的划分,通过脚本生成,可以使用split_train_val.py脚本生成。运行代码后,在Main文件夹下生成下面四个txt文档:
将数据集格式转换成yolo_txt格式
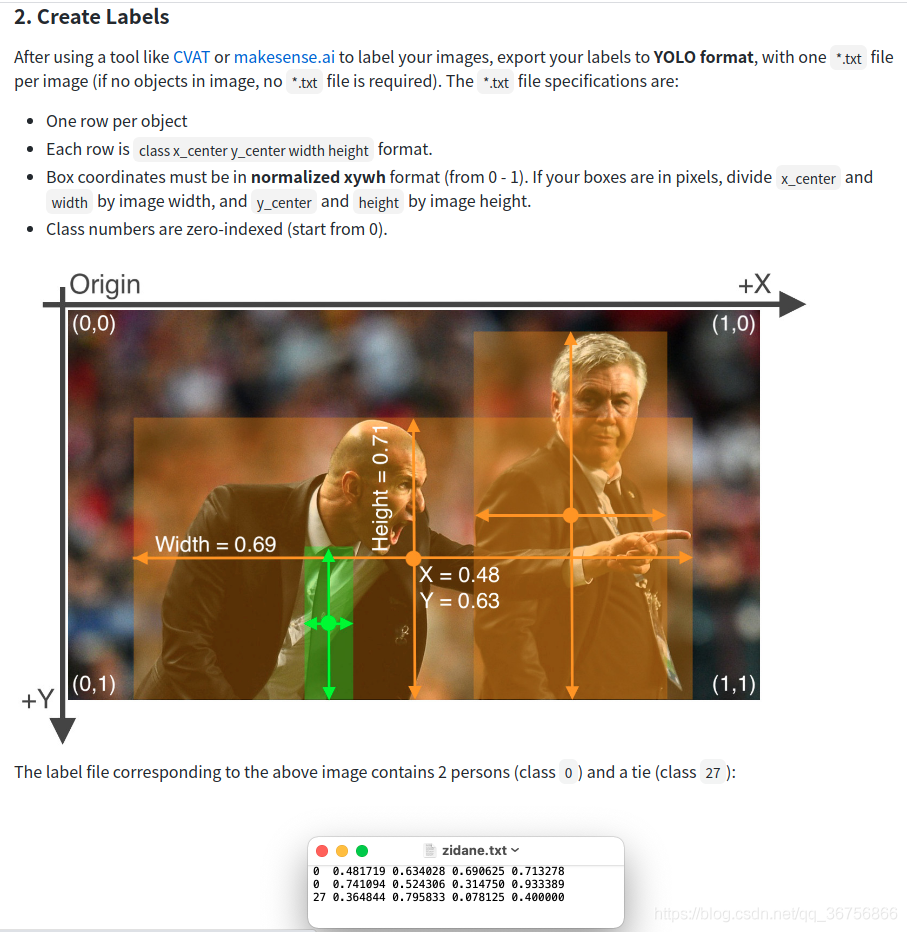
- 接下来准备labels,把数据集格式转换成yolo_txt格式,即将每个xml标注提取bbox信息为txt格式(这种数据集格式成为yolo_txt格式),每个图像对应一个txt文件,文件每一行为一个目标的信息,包括class, x_center, y_center, width, height格式。格式如下:
使用voc_label.py文件,将训练集、验证集、测试集生成label标签(训练中要用到),同时将数据集路径导入txt文件中。
- 运行后会生成如下labels文件夹和三个包含数据集的txt文件,其中labels中为不同图像的标注文件,train.txt等txt文件为划分后图像所在位置的绝对路径,如train.txt就含有所有训练集图像的绝对路径。这一步最重要是将自己类别修改对。

- 三个txt文件里面的内容如下:
3.2 yolov5配置文件修改
3.2.1 修改ab.yaml文件
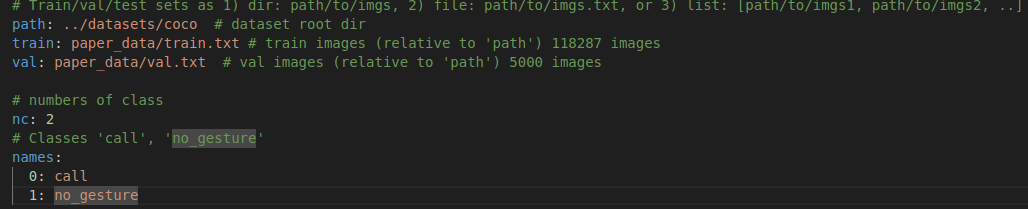
- 在yolov5目录下的data文件夹下新建一个ab.yaml文件(可以自定义命名),用来存放训练集和验证集的划分文件(train.txt和val.txt),这两个文件是通过运行voc_label.py代码生成的,然后是目标的类别数目和具体类别列表,ab.yaml内容如下:
3.2.2 聚类得出先验框
- 聚类得出先验框(可选)(聚类重新生成anchors运行时间较长),最新版的yolov5,它会自动kmeans算出anchors,使用clauculate_anchors.py 内要修改为自己数据集的路径,如下:
运行clauculate_anchors.py跑完会生成一个文件 anchors.txt,里面有得出的建议先验框anchors,内容如下:

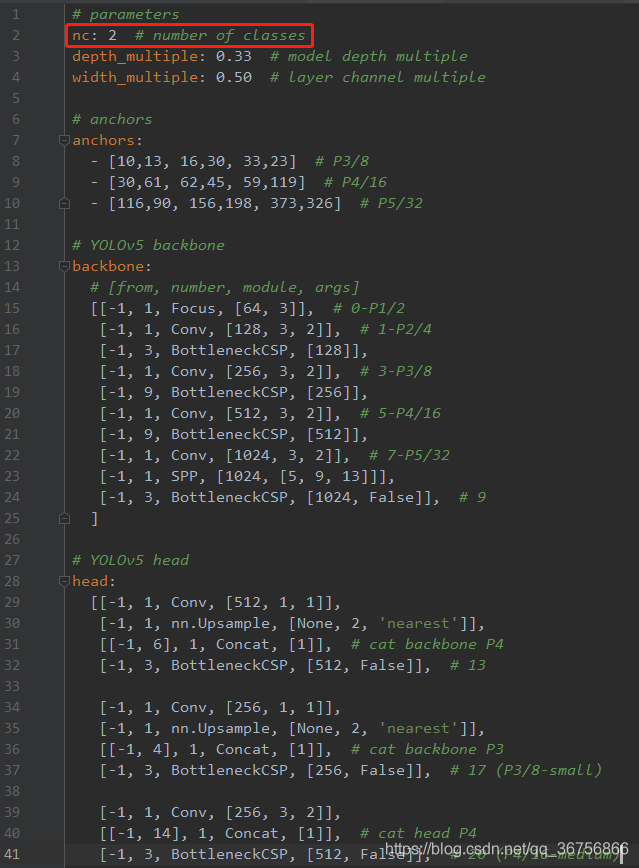
3.2.3 模型配置的修改
- 在yolov5目录下的model文件夹下是模型的配置文件,这边提供s、m、l、x版本,逐渐增大(随着架构的增大,训练时间也是逐渐增大),假设采用yolov5s.yaml,只用修改一个参数,把nc改成自己的类别数;如果anchors是重新生成的,也需要修改,根据anchors.txt 中的 Best Anchors 修改,需要取整(可选) 如下:
4.yolov5训练
- 在train.py进行以下几个修改
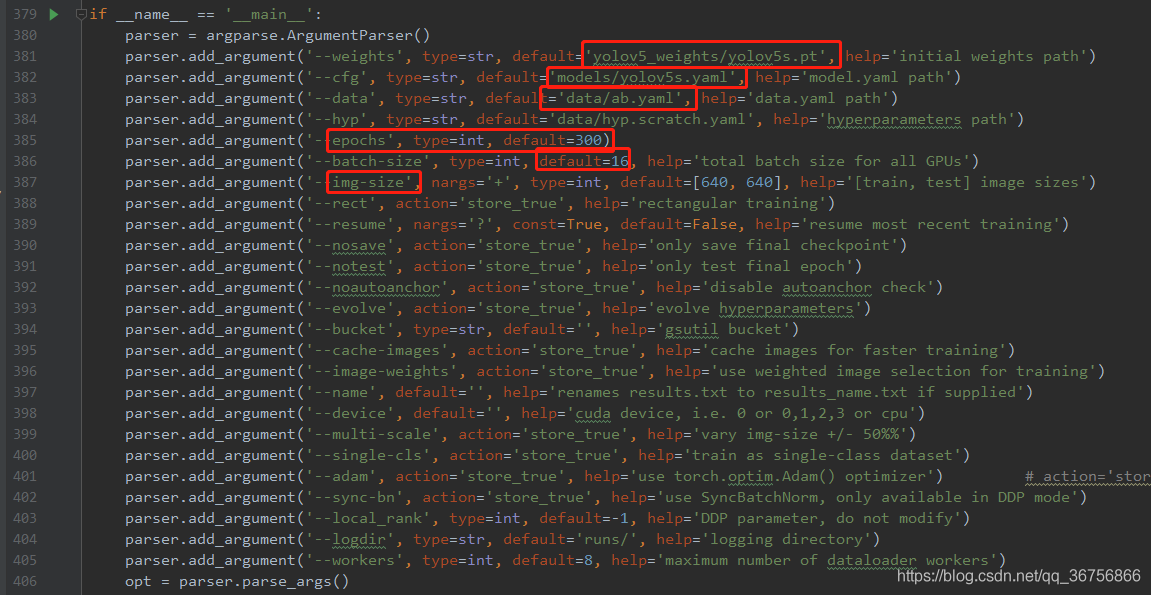
开始训练命令如下
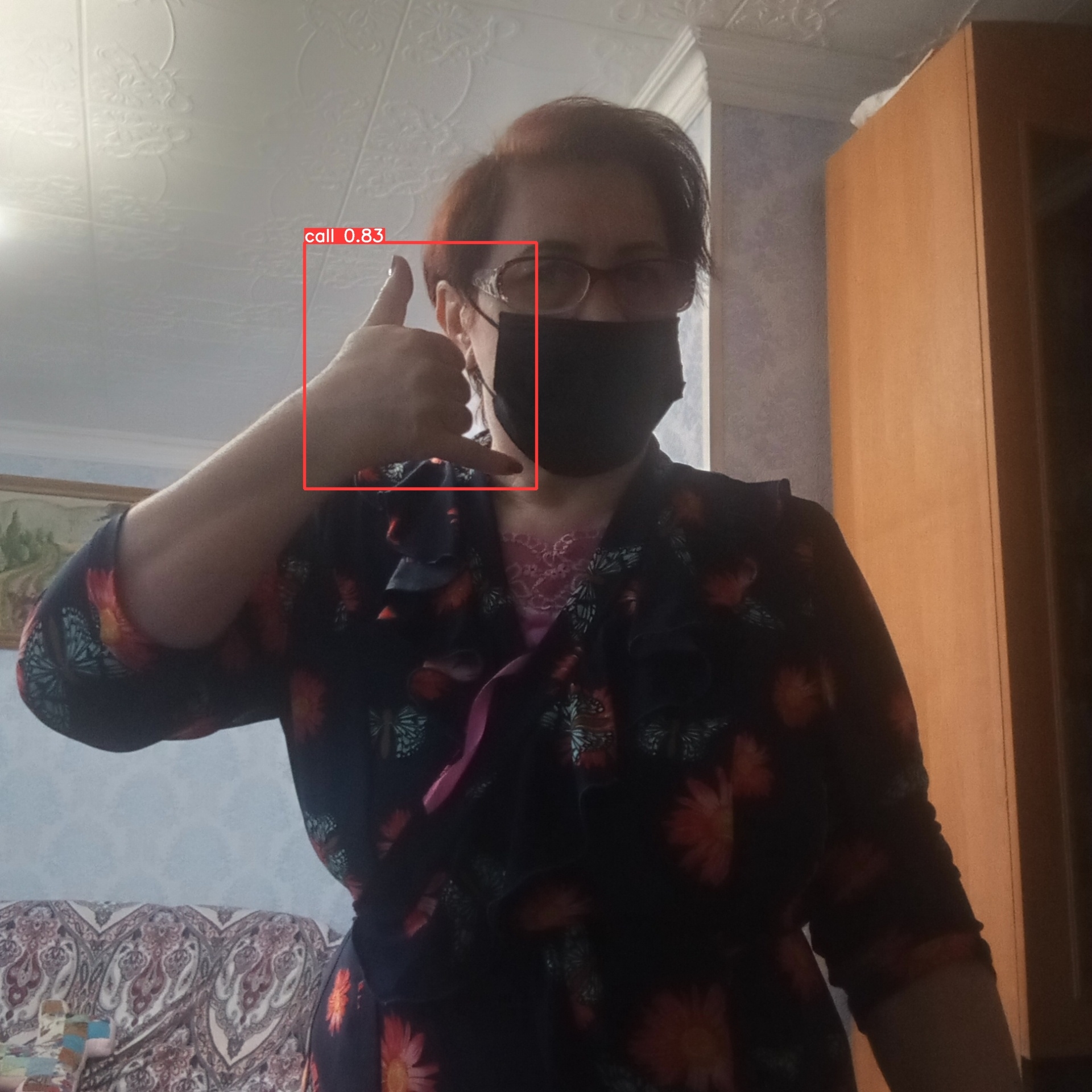
5.yolov5检测效果如下
使用检测命令如下


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)