
1. 概述
1.1 简介
DataTools 模块提供基本的数据解析、数据封包、数据录制、数据回灌、数据回放、数据分析、数据渲染等功能,打造基于数据的完整链路。通过提供库以及可执行工具的形式,基于不同应用场景,更加方便用户使用
1.2 架构设计
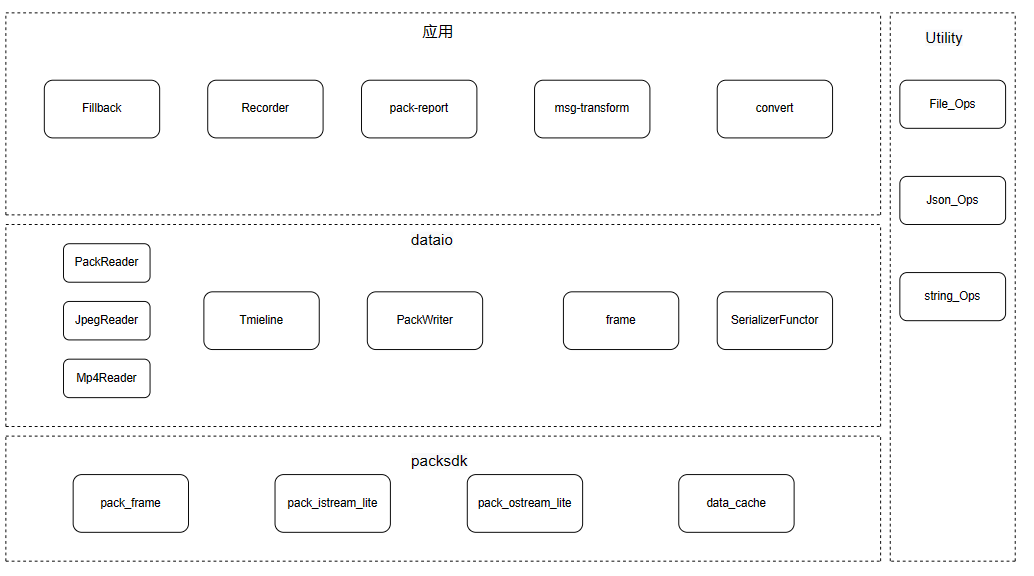
如上图所示:分为四部分:packsdk、data-io、应用、utility,分别功能如下:
packsdk:
packsdk 用于 Pack 格式及 Pack 文件的交互,提供了一套用于操作 Pack 文件的函数接口。通过该SDK,用户不必关心Pack文件的具体结构以及Pack Frame的数据格式,即可读取pack文件,并获取想要的数据。但只对外提供 C 接口,并且不负责数据的序列化和反序列化
data-io:
dataio 也是用户和 Pack 文件的交互,实际上就是对 packsdk 做了一层 C++ 的封装,并且支持数据的序列化和反序列化,使用起来会更简单易用
PackReader: pack 文件的读接口
JpegReader: jpeg 文件夹的读接口
Mp4Reader: mp4 文件的读接口
Timline:多文件的同步机制接口
PackWriter:文件写接口
frame:提供针对于 frame 的增、删、查、改操作,输入输出都是message,会进行数据的序列化和反序列化
BufPool:提供内存池功能
compress:提供压缩和解压缩功能
应用:
Sender:基于 communication 公用的发送接口
Receiver:基于 communication 公用的接收接口
recorder:数据录制
fillback:数据解析
pack-report:数据分析
Utility:
file_ops:提供针对文件/文件夹的公共操作
json_ops:提供针对 json 的公共操作
string_ops:提供针对一些字符串的公共操作
2. 特性说明
2.1 pack存储格式
2.1.1 物理存储结构

version 只会出现在 pack 文件头部
- 除去 file version 外,上述图中剩余的部分恰好是 pack 文件中一帧的构成,一个 pack 有很多帧组成
- 帧构成:一帧中包含一个 meta 和多个data,total_data_len 统计的是所有 data 的总长度。其中帧的 meta 部分存储的结构就是 FrameV2Proto.Frame
2.1.2 逻辑存储结构
Pack 是由很多帧数据组成,每一帧可以视作一连串小消息的集合,每一类消息有一个唯一标识的名称以供区分。如上图所示,是目前涵盖一些典型的小消息。
Pack 的一帧,包含的信息可通过 frame.v2.proto 的 FrameV2Proto.Frame 对数据进行反序列化得到,如下面 protobuf 代码所示:
其中字段含义如下:
字段名称 | 含义 |
|---|---|
version | 应用软件输出 pack msg 的版本信息 |
frame_id | 该帧的编号(应用软件输出时递增计数) |
time | 该帧的主时间戳(起始时间戳) |
proto_version | 区分元信息本身格式的版本信息(目前包含 V0, V1, V2 三个版本,向后兼容) |
data_list | 该帧所包含的消息集合 |
frame_type | 帧类型,见 FrameType。Bundle:所有消息绑定发出,均为同一个时间戳;FreeSync:消息按固定周期发出,时间戳各有不同 |
done_time | 该帧的结束时间戳 |
2.1.3 物理结构到逻辑结构的对应
字段名称 | 含义 |
|---|---|
meta | 消息结构序列化之后的字节流了,使用相应的消息 proto 定义对其进行反序列化,即可拿到该消息的内容 |
gen_ts | 消息产生的时间 |
done_ts | 消息处理完的时间 |
channel | 消息产生的通道(如不同的模组、不同的传感器等) |
data_index | 消息所对应的 pack data 部分的编号,默认的 -1 表示该消息并无 data |
字段名称 | 含义 |
|---|---|
message_name | 消息的名称 |
data | 为了兼容老版本而存在的,可忽略 |
proto | 消息的详细属性 |
物理结构到逻辑结构的具体对应关系如下:
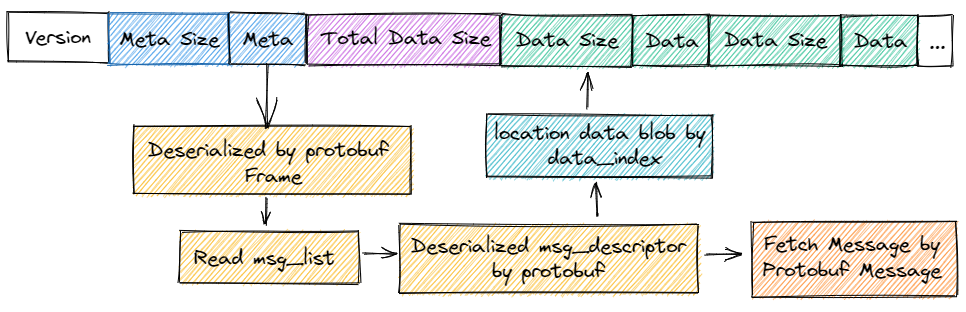
上述过程中,从 pack 解包到序列化后的消息字节流的过程,可使用 pack-sdk 来简化流程;相应的,pack-sdk 也可以逆向地将序列化后的消息字节流打包成 pack。根据消息名称,直接获取消息的结构化数据的过程,可通过 Datatools 来简化流程。
2.2 pack-sdk
2.2.1 关于一帧
2.2.1.1 创建
2.2.1.2 销毁
2.2.1.3 访问
- 可以使用 GetFrameID 获取帧 ID
- GetFrameType 获取帧类型
- GetFrameTimestamp 获取帧时间戳
基本包含了一个消息的全部信息:生成时间、处理完成时间、meta(protobuf 序列化后的二进制流)、data(未经序列化的内存块)。
2.2.1.4 修改
- 可以使用 SetFrameID 设置帧 ID
- SetFrameType 设置帧类型
- SetFrameTimestamp 设置帧时间戳
2.2.2 关于读写
PackSDK 为 Pack 文件的读写分别提供了两个相应句柄:PackFileHandleR和PackFileHandleW。
PackFileHandleR 负责读文件,PackFileHandleW 负责写文件。
2.2.2.1 Pack文件读取
2.2.2.2 Pack文件落盘
2.3 dataio
提供公用基础的读写功能,具体功能如下:
数据读
Pack 文件读
Jpeg 读
MP4 读
数据写
Pack 文件写
Timeline
提供针对多路 pack 时间戳同步的机制
Frame
提供针对于帧的所有操作。增、删、查、改
SerializeFunction
序列化、反序列化类
MsgCenter
维护 msg 和 SerializeFunction 对应关系的类
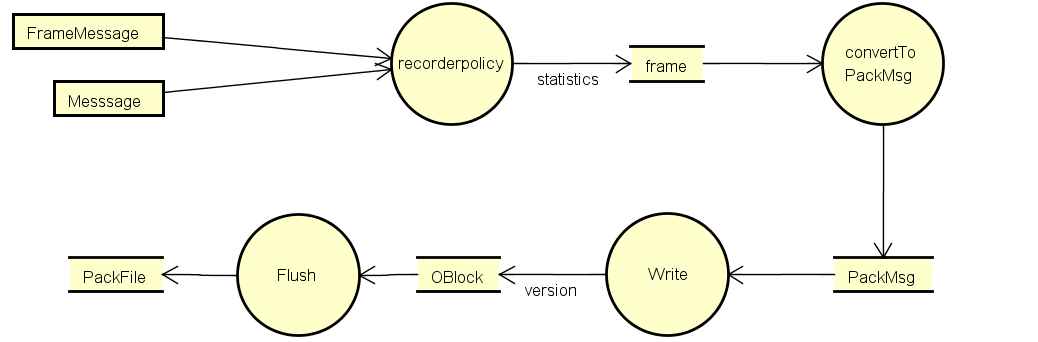
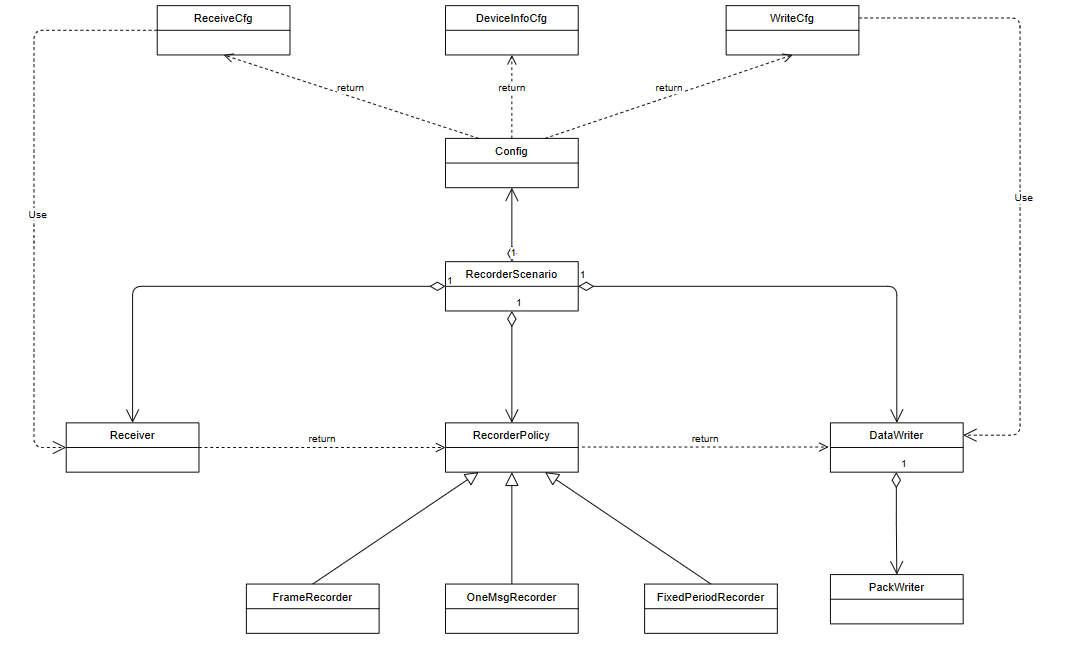
2.4 Recorder
整体数据流如下所示:
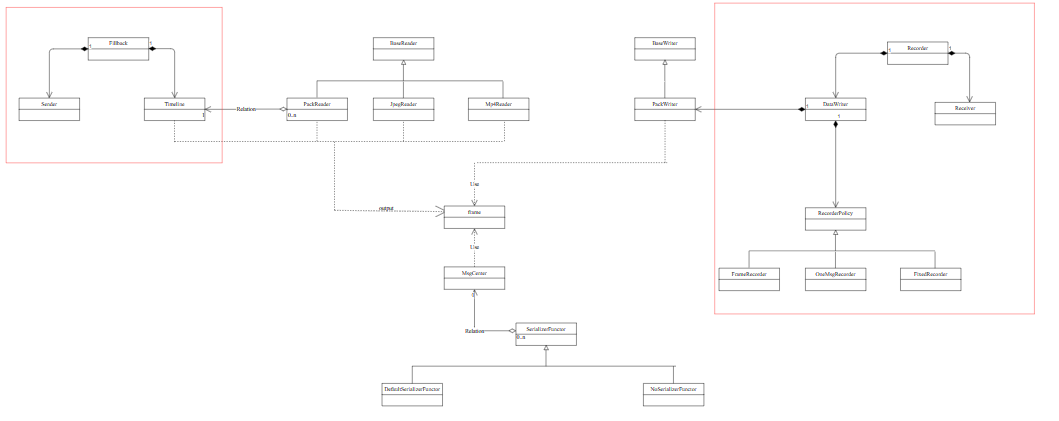
Recorder 整体类图关系如下:
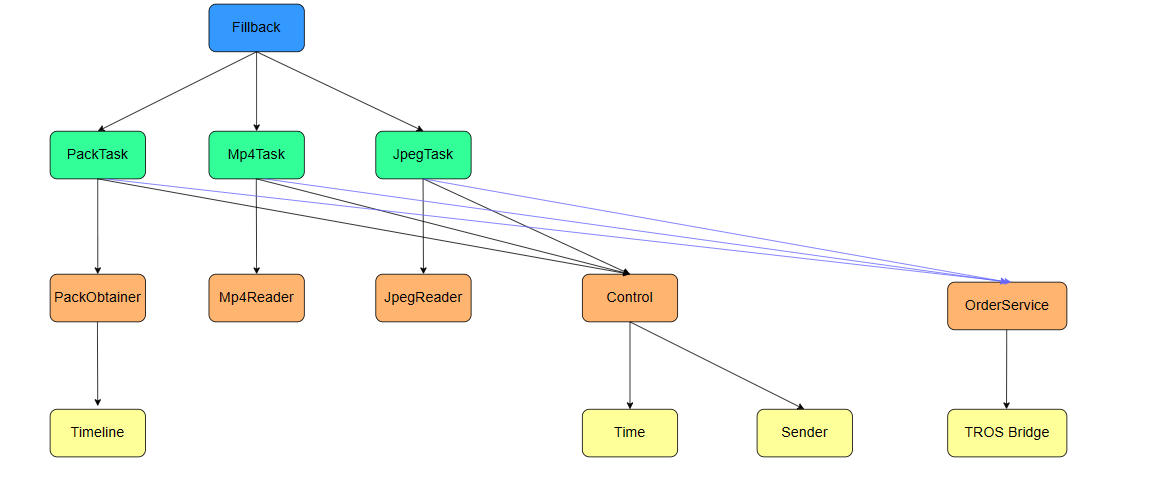
2.4.1 Fillback
整体数据流如下所示:

整体类图关系如下:


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)