
VRSO介绍
静态物体检测(Static object detection,SOD),包括交通信号灯、导向牌和交通锥,大多数算法是数据驱动深度神经网络,需要大量的训练数据。现在的做法通常是对大量的训练样本在 LIDAR 扫描的点云数据上进行手动标注,以修复长尾案例。
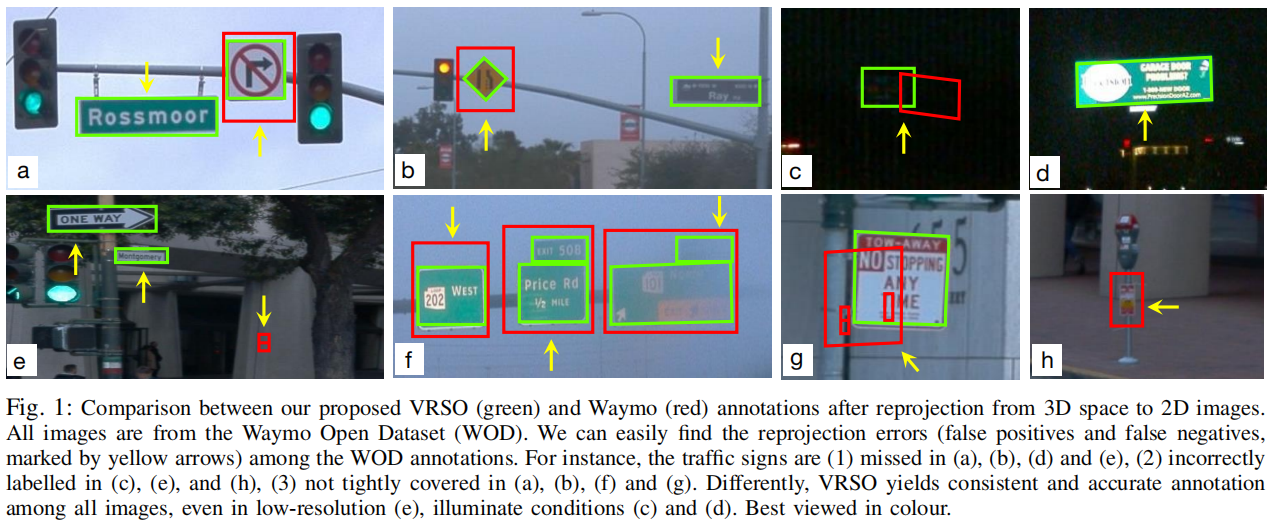
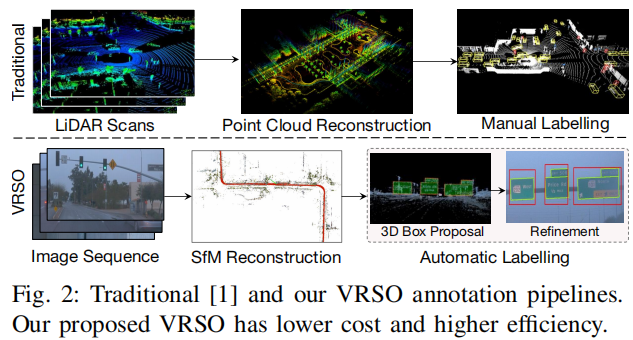
由于手动标注难以捕捉真实场景的变异性和复杂性,通常无法考虑遮挡、不同的光照条件和多样的视角(如图1中的黄色箭头)。因此标注的整个过程链路长、极其耗时、容易出错、成本颇高(如图2)。但并不是所有车都配有Lidar,所以目前公司都寻求自动标注方案,特别是基于纯视觉。
VRSO 是一种以视觉为主、面向静态对象标注的标注系统,主要利用了 SFM、2D 物体检测和实例分割结果的信息,整体效果:
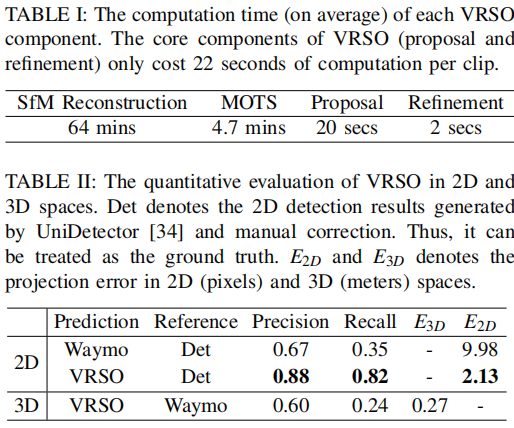
无序列表标注的平均投影误差仅为2.6像素,约为Waymo标注的四分之一(10.6像素)
- 与人工标注相比,速度提高了约16倍
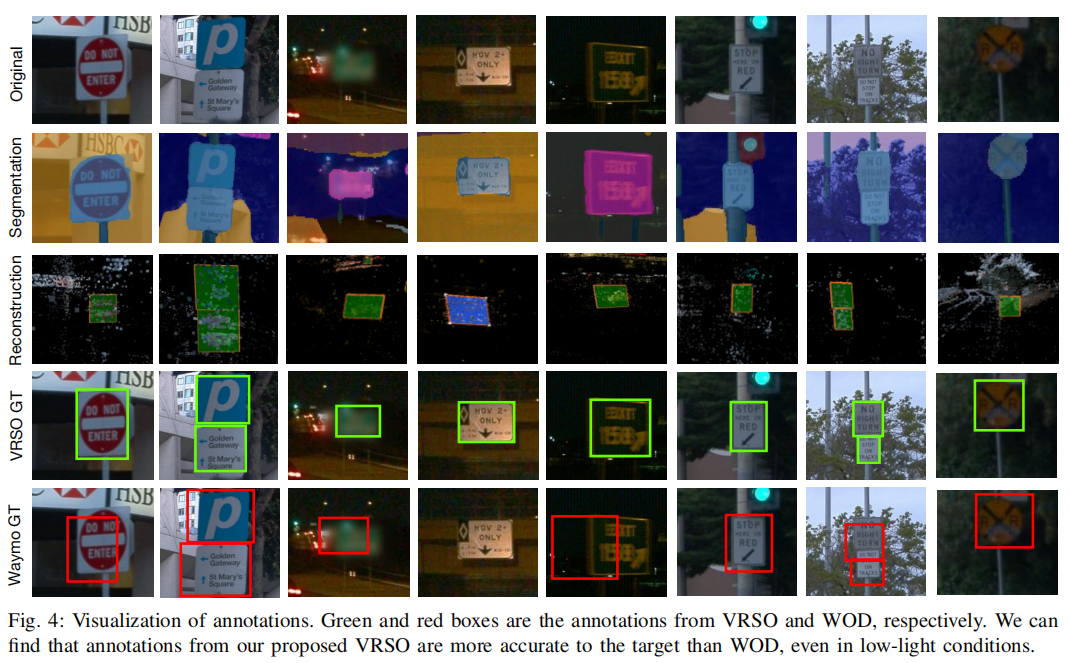
对于静态物体,VRSO通过实例分割和轮廓提取关键点,解决了从不同视角集成和去重静态对象的挑战,以及由于遮挡问题而导致观察不足的困难,从而提高了标注的准确性。从图1上看,与Waymo Open数据集的手动标注结果相比,VRSO展示了更高的鲁棒性和几何精度。
算法简介
VRSO系统主要分为两部分:场景重建和静态对象标注。
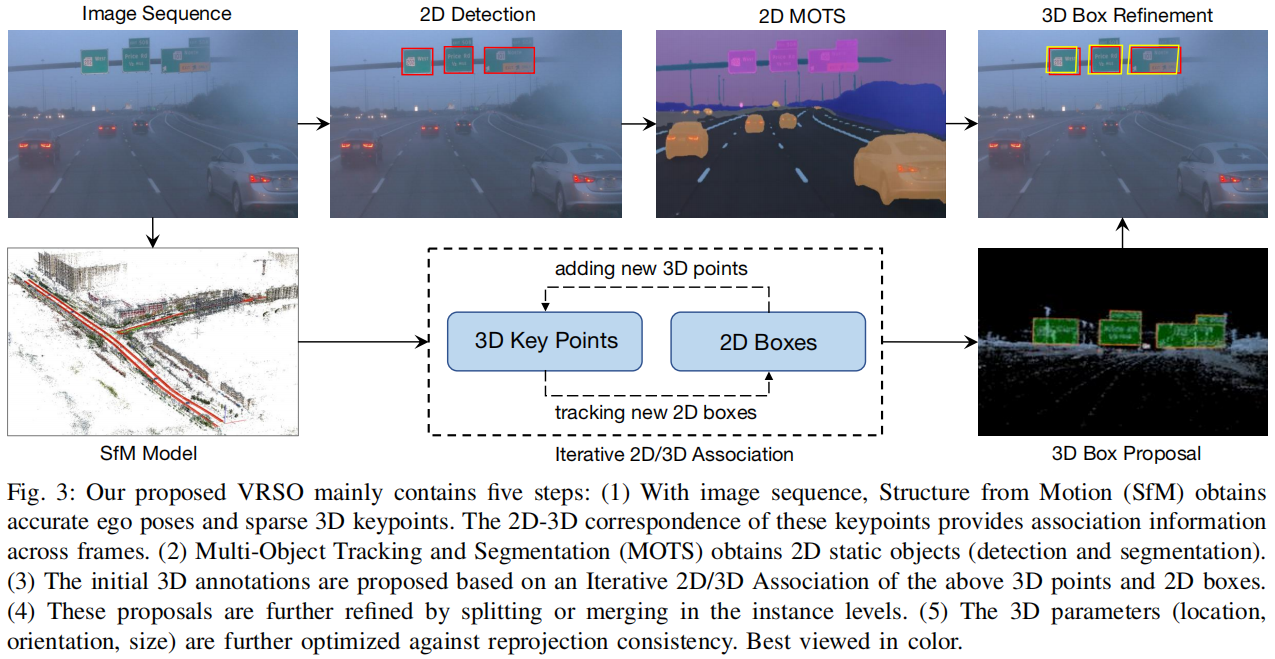
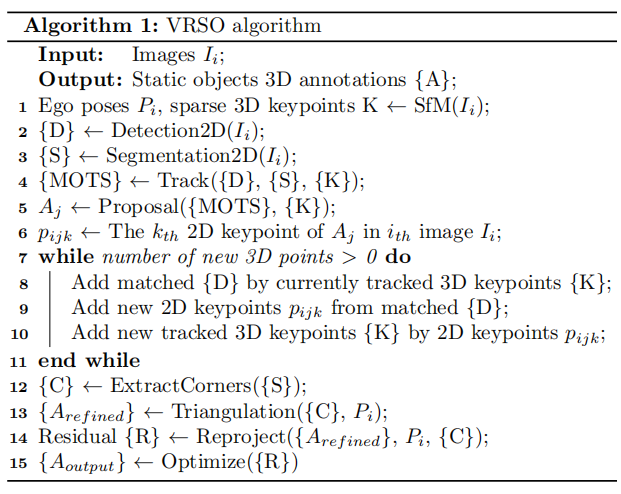
静态对象标注算法,配合伪代码,大致流程是(以下会分步骤详细展开):
采用现成的2D物体检测和分割算法生成候选
利用 SFM 模型中的 3D-2D 关键点对应关系来跟踪跨帧的 2D 实例
引入重投影一致性来优化静态对象的3D注释参数
跟踪关联
step 1:根据 SFM 模型的关键点提取 3D 边界框内的 3D 点。
step 2:根据 2D-3D 匹配关系计算每个 3D 点在 2D 地图上的坐标。
step 3:基于 2D 地图坐标和实例分割角点确定当前 2D 地图上 3D 点的对应实例。
step 4:确定每个 2D 图像的 2D 观察与 3D 边界框之间的对应关系。
Proposal生成
路牌被表示为在空间中具有方向的矩形,它有6个自由度,包括平移(x、y、z)、方向(θ)和大小(宽度和高度)。考虑到其深度,交通信号灯具有7个自由度。交通锥的表示方式与交通信号灯类似。
Proposal 优化
step 1:从 2D 实例分割中提取每个静态物体的轮廓。
step 2:为轮廓轮廓拟合最小定向边界框(OBB)。
step 3:提取最小边界框的顶点。
step 4:根据顶点和中心点计算方向,并确定顶点顺序。
step 5:基于2D检测和实例分割结果进行了分割和合并过程。
step 6:检测并拒绝包含遮挡的观察。从2D实例分割蒙版中提取顶点要求每个标牌的四个角都可见。如果有遮挡,从实例分割中提取轴对齐边界框(AABB),并计算AABB与2D检测框之间的面积比。如果没有遮挡,这两种面积计算方法应该是接近的。

三角化
通过检查在场景重建期间由 SFM 和实例分割获得的3D边界框中的关键点数量,只有关键点数量超过阈值的实例被认为是稳定且有效的观测。对于这些实例,相应的 2D 边界框被视为有效的观测。通过多幅图像的 2D 观测,将 2D边界框顶点进行三角化,以获取边界框的坐标。
对于没有在掩模上区分“左下、左上、右上、右上和右下”顶点的圆形标牌,需要识别这些圆形标牌。使用 2D 检测结果作为圆形物体的观测结果,使用 2D 实例分割掩模进行轮廓提取。通过最小二乘拟合算法计算出中心点和半径。圆形标牌的参数包括中心点(x、y、z)、方向(θ)和半径(r)。
追踪优化
跟踪基于 SFM 的特征点匹配。根据 3D 边界框顶点的欧式距离和 2D 边界框投影 IoU 来确定是否合并这些分开的实例。一旦合并完成,实例内的 3D 特征点可以聚集以关联更多的2D特征点。进行迭代2D-3D关联,直到无法添加任何2D特征点为止。
最终参数优化
以矩形标牌为例,可优化的参数包括位置(x、y、z)、方向(θ)和大小(w、h),总共六个自由度。主要步骤包括:
将六个自由度转换为四个 3D 点,并计算旋转矩阵。
将转换后的四个 3D 点投影到2D图像上。
计算投影结果与实例分割得到的角点结果之间的残差。
使用 Huber 进行优化更新边界框参数
标注效果
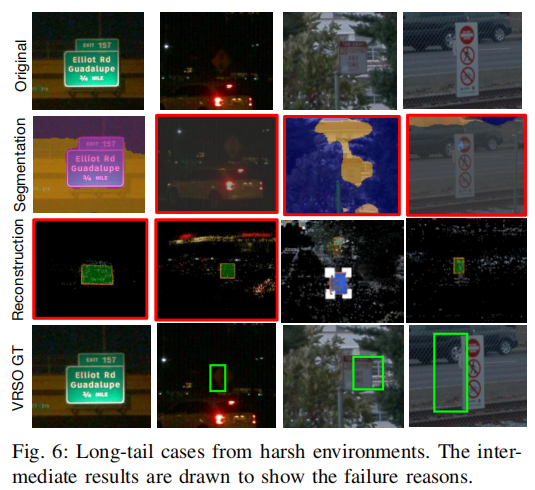
也有一些具有挑战性的长尾案例,例如极低的分辨率和照明不足。
总结
论文:https://arxiv.org/abs/2403.15026
效果展示:
bilibili:https://www.bilibili.com/video/BV16D42157JG/?spm_id_from=333.999.0.0&vd_source=34df4267be146d2dde6e0bf98a2ce363
YouTube:https://youtu.be/tuaVRG4VFJY


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)