
TROS的SDK提供了开发案例,会介绍中间件示例工程的功能、编译及运行方法,以帮助用户快速上手中间件开发。其中,communication示例位于SDK的TROS-SDK-1.3.4/samples/component_samples/communication_ex目录,sample示例对外展示如何使用地平线communication中间件进行数据得pub sub。
使用communication解析6感知分为如下阶段:
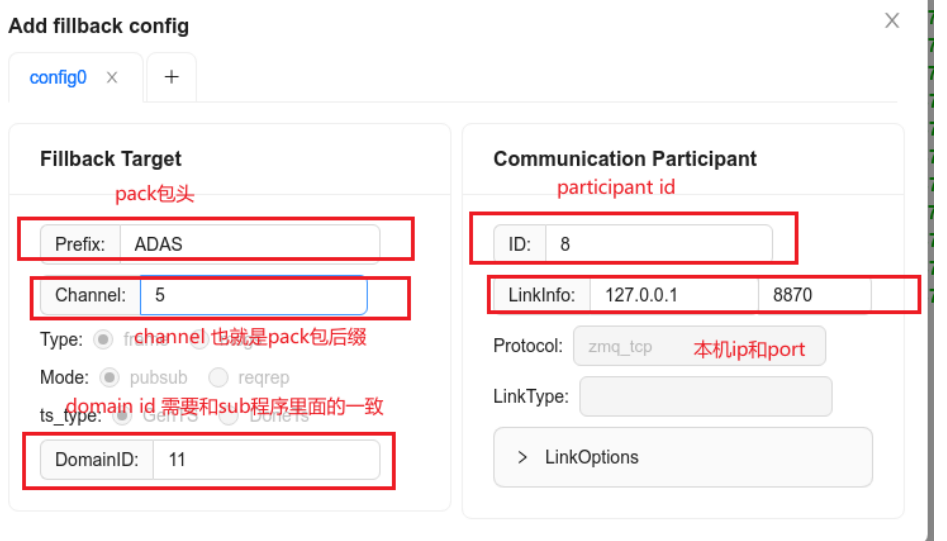
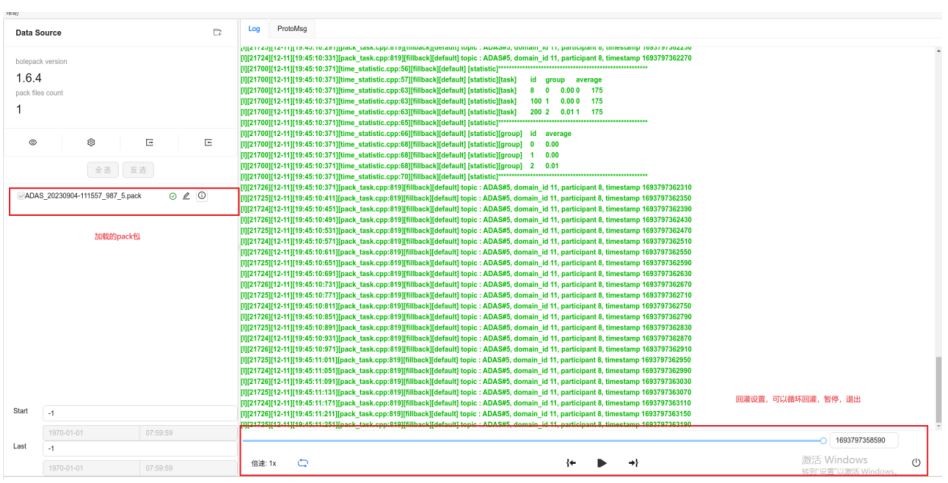
1.在开发机使用bolepackUI工具回灌数据。
2.在开发机上面运行communication可执行程序,打印解析结果。
本教程作为用户手册的补充,会基于communication sample示例,重点介绍如何使用communicatio中间件解析感知结果。
使用communication解析6感知分为如下阶段:
1.在开发机使用bolepackUI工具回灌数据。
2.在开发机上面运行communication可执行程序,打印解析结果。
本教程作为用户手册的补充,会基于communication sample示例,重点介绍如何使用communicatio中间件解析感知结果。
bolepackUI
本教程使用1.3.5版本的Bolepack-Linux-1.3.5工具,基于linux开发机运行。Bolepack的详细使用说明可以查看手册的TROS-SDK-1.3.4/TROS-SDK-1.3.4/docs/TROS.A用户使用指南/tools/datatools/bolepackui章节,这里主要针对communication sample涉及的内容做介绍。
获取工具
进入TROS SDK的/TROS-SDK-1.3.4/tools/DataTools/bolepackUI/Bolepack-Linux-1.3.5.zip目录,解压Bolepack-Linux-1.3.5.zip压缩文件,得到Bolepack-Linux-1.3.5文件夹,可以在这里运行bolepack工具。
下载pack
在Bolepack-Linux-1.3.5中,我们新建pack文件夹,并将Bolepack-Linux-1.3.5使用到的pack数据下载到pack文件夹内:
运行bolepackUI
下面是运行正常的log
pub端
下面是运行正常的log
pub端
其中,SimpleImageSubCallbackWithTopic是sub回调函数,解析过程都是在这里实现,topic是订阅的主题名称,args.protocol根据运行时输入的value动态选择通信协议,本示例中使用2,zmq_tcp协议。
编译
在samples/component_samples/communication_ex/example文件夹中,运行以下命令即可编译生成可执行文件:
其中,--config参数用于指定编译目标平台及编译工具,可选值:[linux_conan, linux_cmake, j5_conan, j5_cmake, …],这里使用conan编译工具编译可以在Linux平台上运行的程序。
编译结束后,会在example文件夹下生成build/build_subfolder/bin文件夹,包含odometry_sub可执行文件,以及从config目录复制来的communication.json配置文件。
编译结束后,会在example文件夹下生成build/build_subfolder/bin文件夹,包含odometry_sub可执行文件,以及从config目录复制来的communication.json配置文件。
运行
在回灌正常的基础上执行./odometry_sub 2 13,其中2是上文所说的选择的通信协议类型,13对应communication.json中的participants id 13
如果运行正常将输出解析结果:



'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)