
Pack frame
communication 发送的Msgs分为大消息和小消息,小消息是单个topic,Obstatcle就是单个topic,大消息可以视作一连串小消息的集合,也就是下面打印的obstacle、odometry、laneline_v2等topic的集合,组成一起就是一帧数据(Frame)。帧构成:一帧中包含一个 meta 和多个data,totaldatalen 统计的是所有 data 的总长度。其中帧的 meta 部分存储的结构就是 FrameV2Proto.Fram,具体介绍可以看TROS-SDK-1.3.4/docs/TROS.A用户使用指南
/developer_guide/datatools/packsdk
/developer_guide/datatools/packsdk
使用bolepackUI回灌数据,bolepackUI回灌操作可以看<使用communication sample解析地平线6V感知结果>,需要注意obstatcle只有融合端口才会输出。
Obstatcle Proto部分字段,该示例只解析红色标注字段,其他字段可以按照proto嵌套关系依次解析。
sub解析
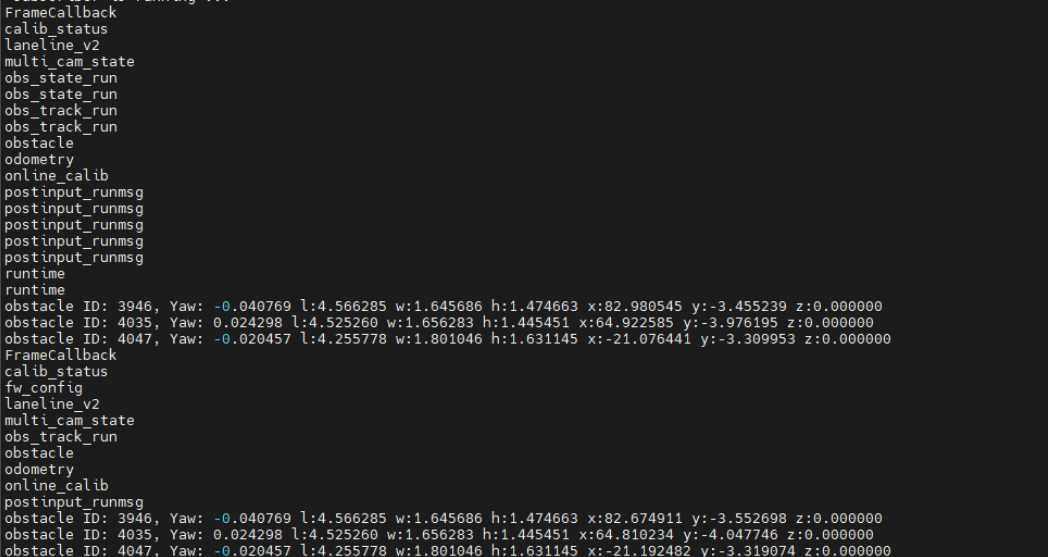
运行执行./obstacle 2 13,如果运行正常将打印障碍物信息:

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)