
常见图像格式
目标:掌握不同图像之间的区别和联系
RGB:每个像素点都会存储红绿蓝三个颜色通道的亮度值(0-255)
纯白(255,255,255)纯黑(0,0,0)
BGR:只是红绿蓝三个通道排列顺序不同,其他与RGB一样,常用于OpenCV中
RGB/BGR每个像素点必须同时存储R,G,B三个通道,不适合做视频图像处理
YUV:采用亮度—色度分离,Y为亮度UV为色度,每个通道数值范围为(0-255)
只有Y为黑白灰度图,可以识别图像内容,UV只能看见色彩
视频处理领域可减少UV分量来减少数据量。根据Y和UV占比分为YUV444,YUV422,YUV420
YUV444每个像素24bits,YUV422每个像素16bits,YUV420每个像素12bits
4为最多4个Y共享一对UV
YUV420根据数据排布方式不同分为420P和420SP,Y相同,UV略不同
420P:Y连续存放,U连续存放,V连续存放
420SP:Y连续存放,UV交替存放
NV12属于YUV420SP,每四个Y共用一组UV
根据Y和UV分量是否存在一片连续内存空间,分为NV12和NV12_SEPARATE
NV12数据量是RGB等图像格式的一半,是嵌入式端部署图像的首选

Gray灰度图
每个像素点只包含一个亮度值(0-255),只包含亮度信息,图像数据量较小,在对图像亮度比较敏感场景有重要价值,如人脸识别
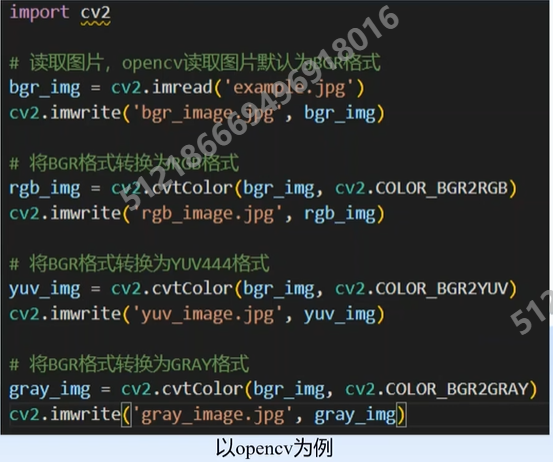
图像格式转换
数据排布与跨距对齐
数据排布
数据排布:四个维度的排布方式
批量大小N,特征图通道数C,特征图高度H,特征图宽度W
NV12不适用NHWC/NCHW
NHWC:在内存按照CWHN顺序存储,不同通道同一位置像素会存储在一起

NCHW:按照WHCN顺序排序,一个通道内部所有数据存储在一起


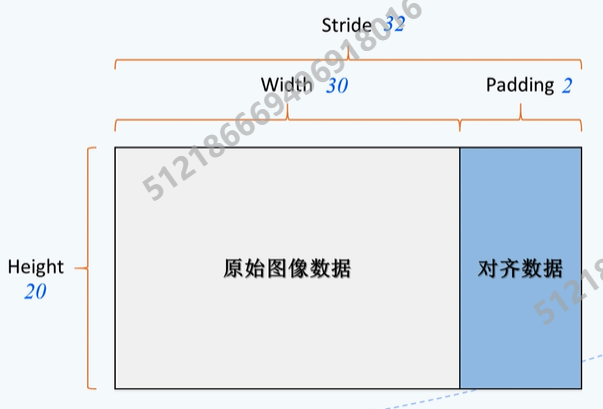
跨距对齐
图像存储在内存中每一行所占空间的实际大小
Padding做跨距对齐,原始图像为8位深灰度图,Stride=32bits,Height=20bits,Width=40bits,则Padding=2bits
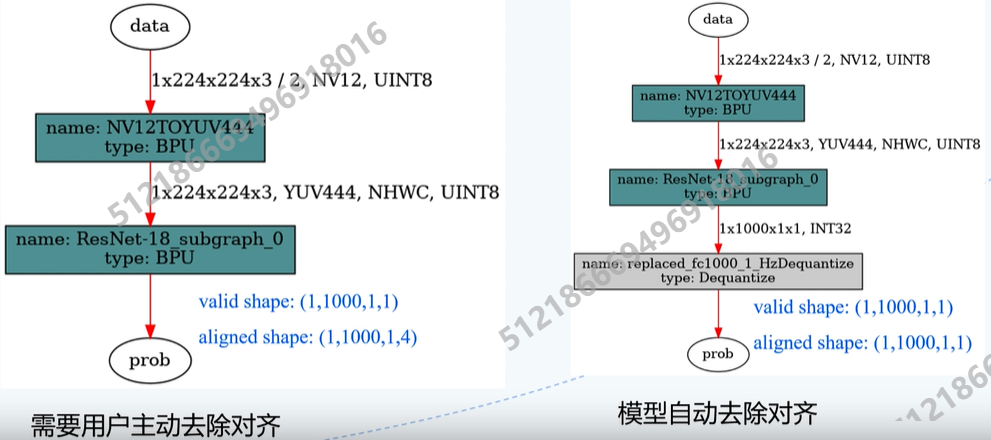
去除对齐:绿色BPU算子,灰色CPU算子
深度学习模型量化
为什么需要量化
深度神经网络推动了AI的发展,需要设置更加高效的网络结构或者通过压缩、编码等方式减少网络规模
更小的模型占用
更少的工作内存和用于激活的缓存
更快的推理速度
更低的功耗
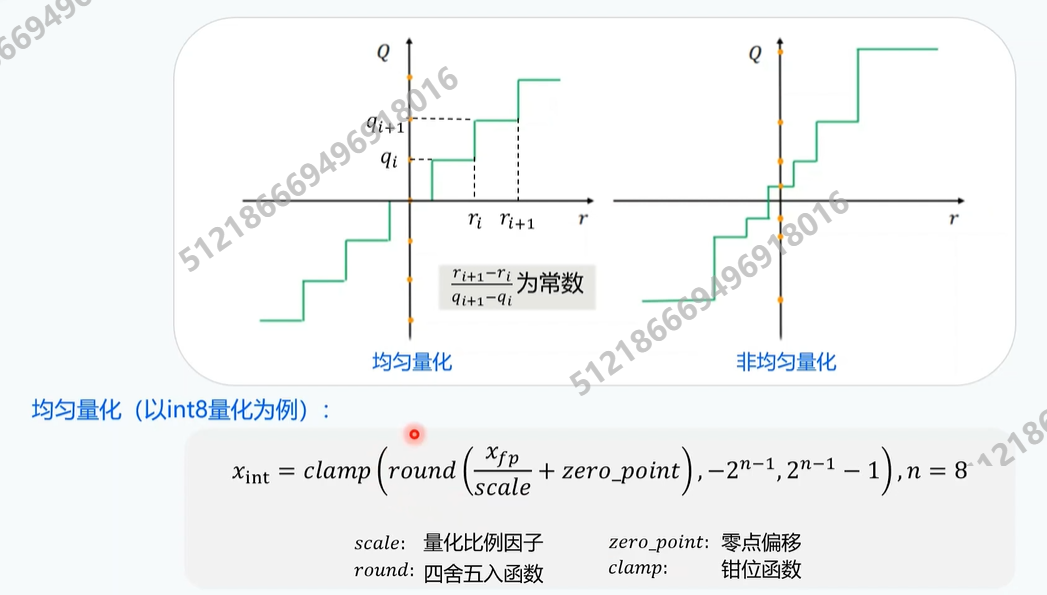
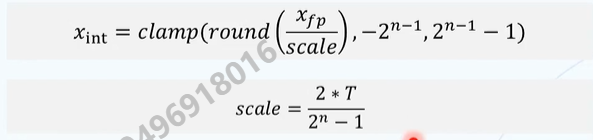
量化
用离散的符号或者整数值来近似连续信号的过程
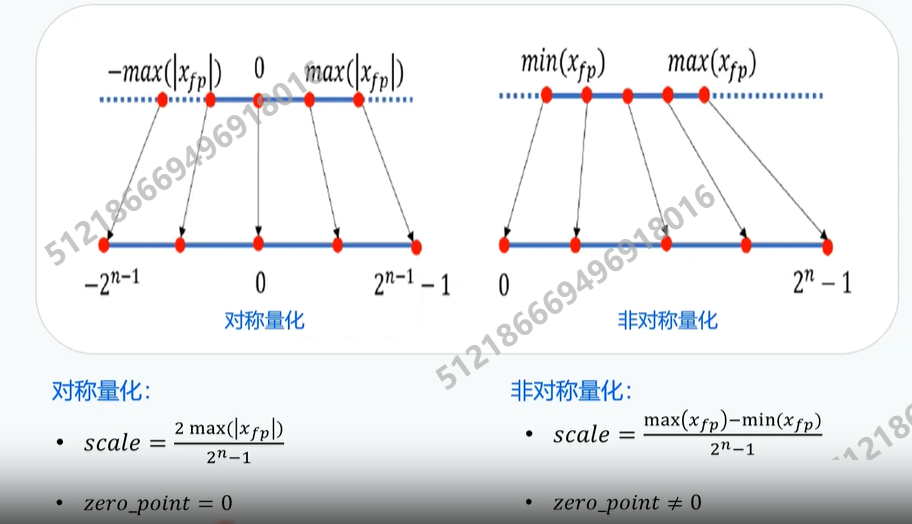
均匀量化和非均匀量化
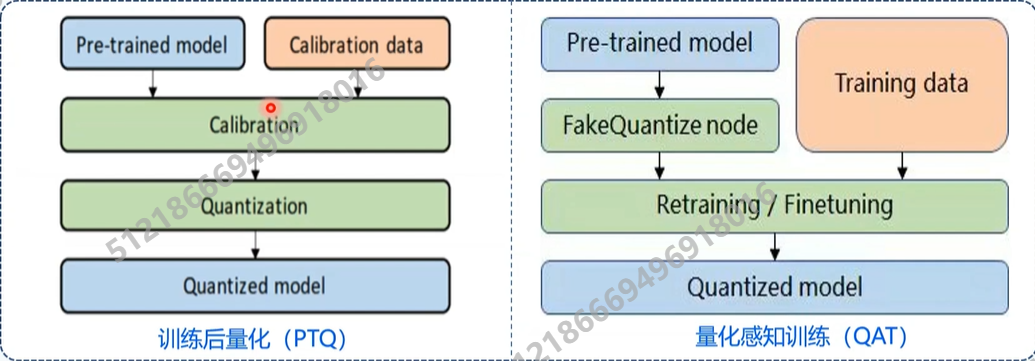
PTQ:使用一批校准数据对训练好的模型进行校准,以获取截断范围(量化阈值),后用其进行量化。简单快速、无需训练
QAT:将训练过的模型量化后再进行重训练,相对复杂
地平线支持的量化方式
PTQ,QAT两种
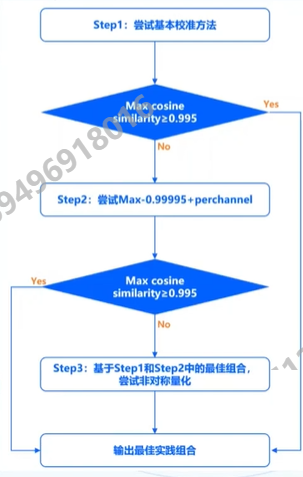
对称量化
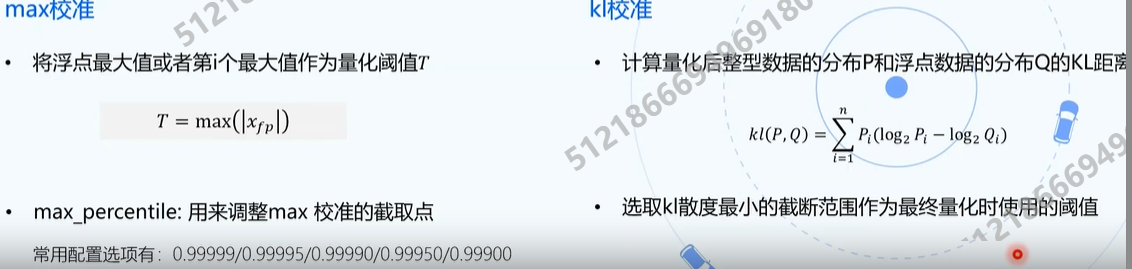
max校准,kl校准
mix校准:集成多种校准方法的搜索策略
确定量化敏感节点
遍历所有量化敏感节点,尝试KL,Max和Max-0.99995校准方法,选出最佳的,得到Mix校准模型
评估几个校准模型的误差,输出最优模型
default校准:从系列校准话参数中获得效果较好的组合
地平线天工开物芯片算法工具链概述
引言
XJ3
XJ3
面对车载
J5
高效智能原生支持,低延迟,高效率
安全岛系统监测和故障工作
双核地平线BPU加双核P6 DSP和八核A55 CPU
地平线天工开物芯片算法工具链使用指南
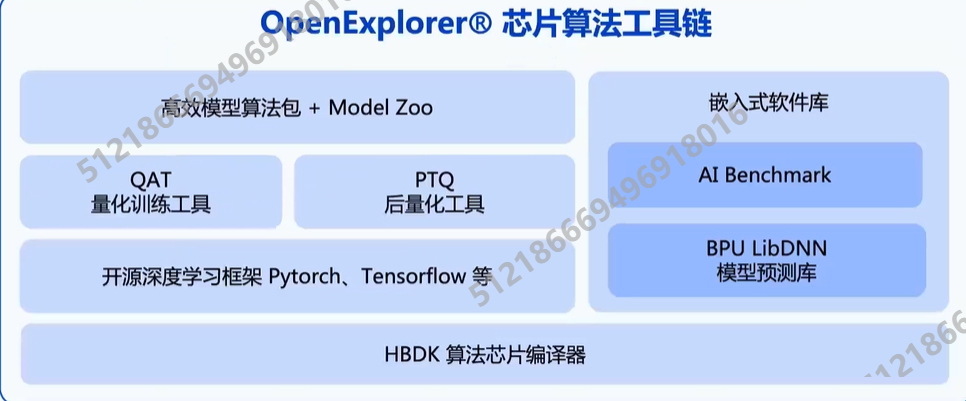
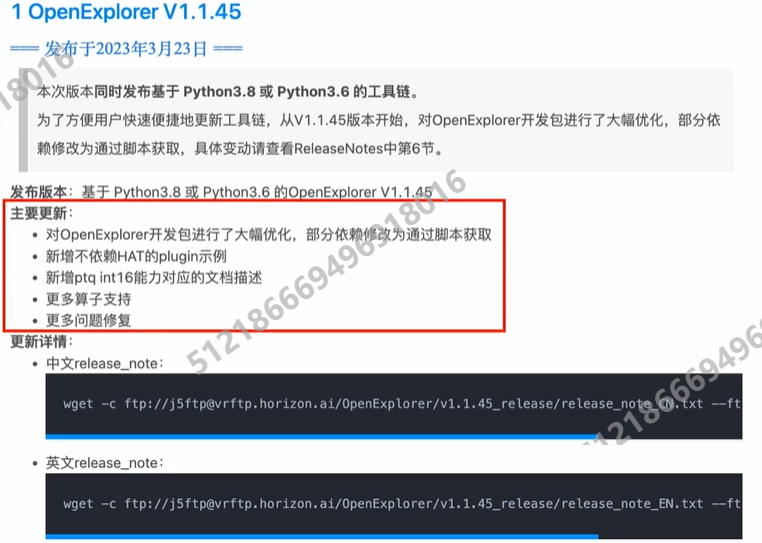
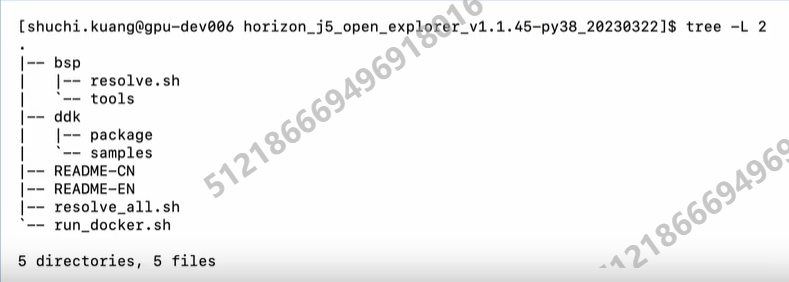
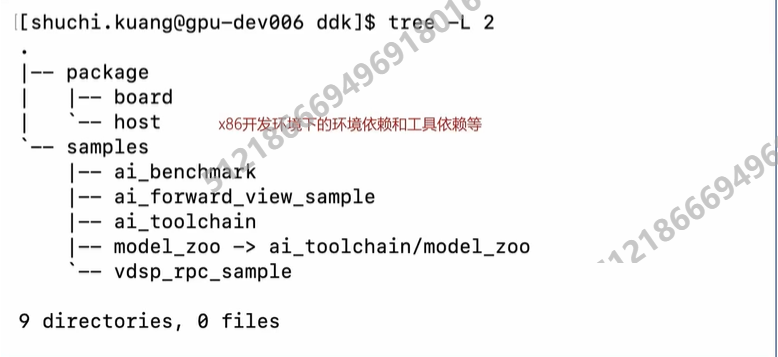
OpenExplrer

OpenExplrer基本能力
模型量化:将训练好的深度神经网络的权值】激活值等从高精度压缩至低精度的操作过程,且量化后模型精度与量化前尽可能接近,降低功耗,提升计算速度,减少内存和存储占用
量化方案:PTQ为第一选择
模型优化编译:计算拆分,指令并行,计算融合
模型部署:为芯片提供嵌入式端预测库,实现每个计算在最合适器件上的最优调度策略
调试工具与示例:转换工具,性能测评工具,仿真推理工具,一致性对齐工具,精度调试工具,性能调试工具
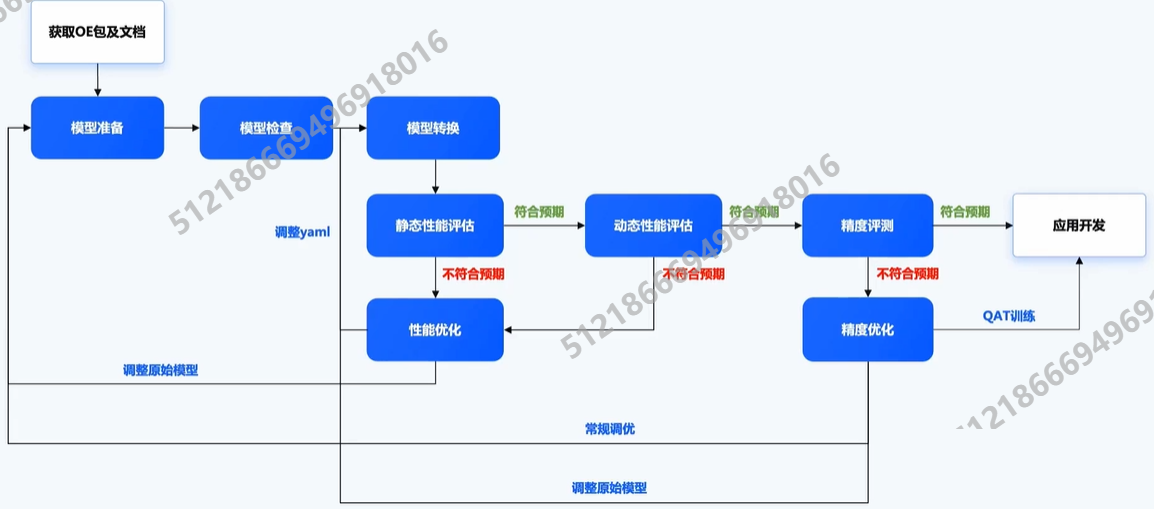
工具链使用流程与建议
地平线开发者社区-产品中心-资源中心
http://developer.horizon.ai/resource


板端部署-LibDNN
适配地平线所有芯片
异构调度,无需开发者干预
接口简单易用
支持模拟器端和板端推理
DSP开发
RPC只需几个接口就可以完成AMR端和DSP端的功能调用


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)