
1. 引言
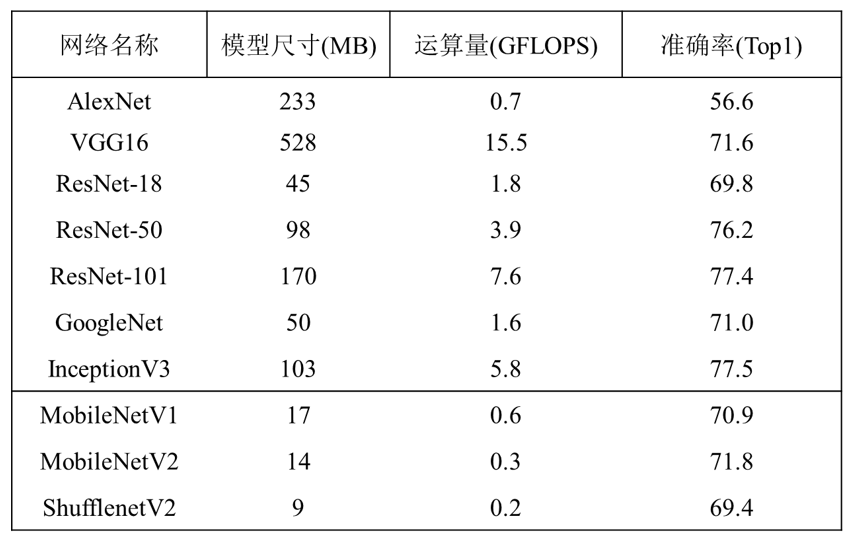
在过去的十年中,神经网络对图像分类、目标检测、目标跟踪,实例分割等任务推理的准确性有了显著提高,这通常是通过高度过度参数化的模型实现的。但是会出现以下疑问:网络的深度的持续增加是否也能同步提高分类任务的准确率?复杂的结构和巨大的参数量是否也能提高神经网络的表征性能?基于以上问题,卷积神经网络经历了结构愈发复杂,参数愈发繁多的发展阶段,VGG网络层数在短时间内发展到了惊人的16到19层,更有甚者研究出了高达22层的GoogleNet。
此外,自动驾驶等应用对网络推理的实时性要求极高,否则会存在安全隐患。因此,各式各样的深度神经网络压缩和加速技术应运而生,在保证网络准确率的同时试图去除网络中的冗余,即在网络性能以及运算代价之间寻找良好的权衡。
因此,迫切需要优化模型的技术,以减少模型尺寸、实现更低的功耗和更快的推理速度。深度学习领域对这些问题从事了大量的研究,主要有两个方面:
设计更加高效的网络架构,用相对较小的模型尺寸达到可以接受的精确度,例如上表中的 MobileNetV1、MobileNetV2 和 ShufflenetNetV2。
- 通过压缩、编码等方式减小网络规模。量化是工业界广泛采用的压缩方法之一。
通常情况下,可以共同使用以上两种策略来取得令人瞩目的成果。例如,TensorFlow 量化的MobileNetV1 仅为 4.8MB,这甚至比大多数 GIF 动图还要小,从而可以轻松地部署在任何移动平台上。
2. 硬件背景
在深入研究技术细节之前,我们首先来了解神经网络量化的硬件背景以及它如何在设备上实现高效推理。神经网络是使用计算机模拟生物神经系统中人类思维方式的算法,它的基本单位是人工神经元,通过相互连接形成一张神经网络。下图展示了单个神经元的计算结构:
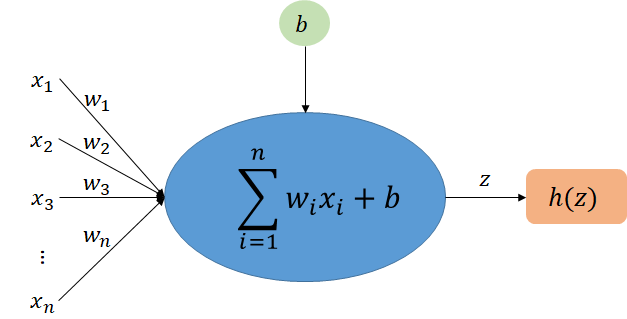
- x1,x2,...,xnx_1,x_2,...,x_nx1u200b,x2u200b,...,xnu200b表示输入;
- w1,w2,...,wnw_1,w_2,...,w_nw1u200b,w2u200b,...,wnu200b表示权重参数;
bbb表示偏置项。
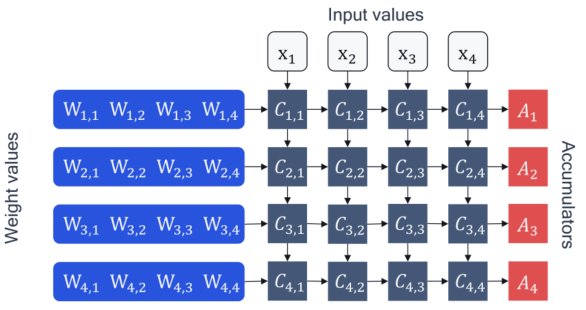
上述操作也被称为乘法累加(Multiply-Accumulate,MAC)。对于较大型的矩阵向量乘法,硬件层面进行的操作是:
重复进行多次MAC操作,一旦循环运算完成,累加器中的数据值将被移动回存储器,用于下一个神经网络层;
神经网络通常使用FP32类型权重参数和激活进行训练,如果基于FP32执行推理,处理元件和累加器将必须支持浮点逻辑,并且需要将32位数据从内存传输到处理单元;
- MAC操作和数据传输消耗了神经网络推理期间消耗的大量能量。因此,通过使用这些量的低位定点或量化表示,可以获得明显的益处。低位定点表示,如INT8,不仅减少了数据传输量,而且还减少了MAC操作的大小和能耗。
相对于浮点数运算,整数的加法器的硬件结构要简单得多,这也在一定程度上降低了功耗。这是因为浮点数的加减法不是简简单单地将尾数加在一起,要考虑阶码。浮点数加减法的实现方法就是以绝对值大的数字为基准,移动绝对值小的数字,然后做加减。所以硬件模块首先要通过比较大小来选择减数和被减数,选择阶码和符号,然后进行移位尾数相加。
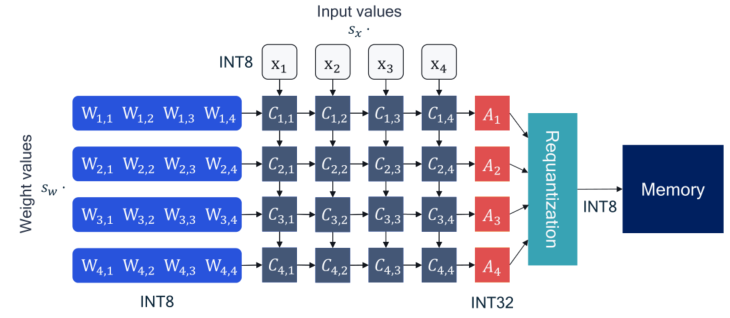
量化以低于浮点精度的位宽计算和存储张量,量化模型以降低的精度而不是全精度(浮点)值对张量执行部分或全部操作,使得模型的表示更加紧凑,从而可以在许多硬件平台上进行高性能矢量化运算。在神经网络量化过程中,权重和激活通常被保存为低bit精度而不是训练时的FP16或者FP32。工业界通常选择 INT8 量化,从FP32到INT8,可以在以下几点实现性能提升:
模型存储缩小4倍;
内存带宽减少2-4倍;
由于内存带宽的节省和 INT8 算法的计算速度加快,推理速度提高了 2-4 倍(确切的加速速度因硬件、runtime和模型而异)。
3. 量化基本概念
3.1 浮点量化
由于量化桥接了固定点(fixed point)和浮点(floating point),在接触相关研究和解决方案之前,有必要先了解它们的基础知识。定点和浮点都是数值的表示,它们的区别在于:将整数(integer)部分和小数(fractional)部分分开的点以及点在哪里。定点保留特定位数整数和小数,而浮点保留特定位数的有效数字(significand)和指数(exponent)。
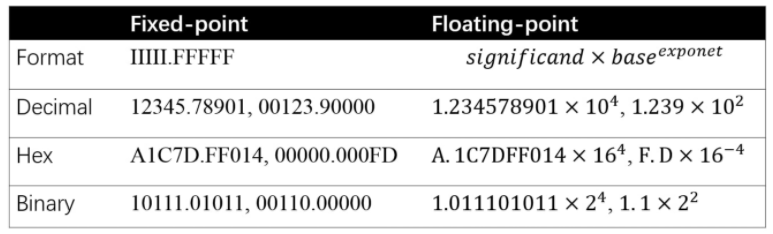
在指令集(Instruction Set Architecture)的内置数据类型中,定点是整数,浮点是二进制格式。一般来说,指令集层面的定点是连续的,因为它是整数,且两个邻近的可表示数字的间隙是 1 。另一方面,浮点代表实数,其数值间隙由指数确定,因而具有非常宽的值域。
FP32的单精度值具有 4 个字节,包括一个符号位、一个 8 位 二进制指数和一个 23 位尾数,所以32 位数值最大整数是232−12^{32}-1232−1,浮点值域为 [(2−223)×2127,(223−2)×2127][(2-2^{23})\times2^{127},(2^{23}-2)\times2^{127} ][(2−223)×2127,(223−2)×2127],值越接近零就越准确。在给定指数时,浮点在不同范围内拥有数值数量相同。因此,将网络从FP32转换为INT8并不像数据类型转换截断那样简单。
3.2 均匀量化与非均匀量化
均匀量化的操作如下所示:
- 通过在权重张量(FP32)中找到 min 和 max 值从而确定xscalex_{scale}xscaleu200b 和 xzero_pointx_{zero\_point}xzero_pointu200b 。
- 将权重张量的每个值从 FP32 转换为 INT8 。
注意:当浮点运算结果不等于整数时,需要额外的舍入步骤。例如将 FP32 值域 [−1,1] 映射到 INT8 值域 [0,255],有xscalex_{scale}xscaleu200b=2/255,而xzero_pointx_{zero\_point}xzero_pointu200b=255-255/2约等于127。
均匀量化可以用以下公式表示:
其中:
- xfx_{f}xfu200b为原浮点数,xintx_{int}xintu200b为量化后的定点值
scale是量化系数;
zero_point为偏移量,表示浮点值0对应的量化定点值;
round为取整函数;
n为量化位宽,比如int8量化时n=8;
clamp为钳位函数,将不断增加、减小或随机变化的数值限制在一定的范围内;
而非均匀量化则采用一些非线性函数,例如采用对数分布、k-means聚类等方式确定原浮点数与定点值之间的对应关系。虽然相较于均匀量化,非均匀量化能根据原数据分布特点采取合适的映射方式,能更好地保持精度,但很难被部署在硬件上。
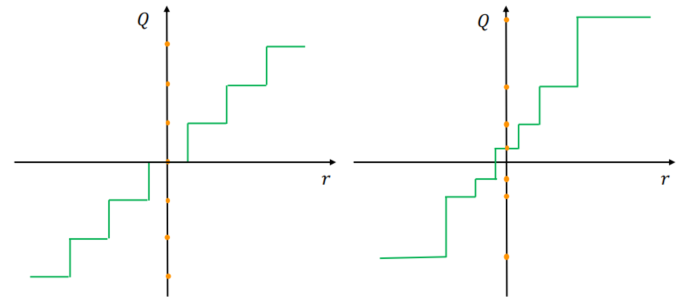
3.3 对称量化与非对称量化
针对均匀量化,不同量化算法其研究核心都是如何确定量化比例系数scale和偏移量zero_point,尽可能地在保证模型压缩效果的同时减少量化误差的引入。其中,scale的计算公式如下所示:
但是,当权重和激活值分布不均衡的时候(例如经过Relu后的激活值都为非负数),非对称量化可以得到更精准的裁切范围,避免有效信息被压缩甚至是被淹没。
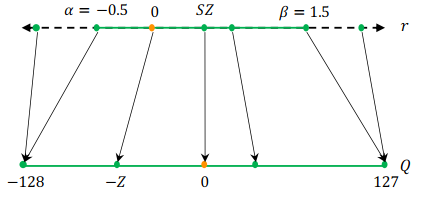
这种直接采用min/max的方式容易受到激活值中异常数据的影响,导致截断范围变大,影响量化精度。为解决这个问题,通常使用percentile代替min/max,也就是使用特征图中第i个最大值/最小值来代替min/max,或采用使得浮点值和量化值之间kl散度最小的β和α。
3.4 PTQ和QAT
无论以上哪种方法,量化操作都对数据做了近似,丢失了部分高频信息,必然会引入量化误差。但由于神经网络本身具有一定的鲁棒性和容错性,少量的量化误差并不会影响网络性能,仅通过训练后量化(Post-training Quantization,PTQ)即可用于部署。但如果量化误差过大超过神经网络本身的韧性,其性能将会呈现一定地下降。此时,需要对网络参数进行重训练以适应量化操作带来的数据分布变化,该训练过程一般被称为量化感知训练(Quantization Aware Training,QAT)。
3.4.1 PTQ
3.4.2 QAT
4. 地平线PTQ量化
PTQ是使用一批校准数据对训练好的模型进行校准,以获取量化阈值[α,β],然后使用由量化阈值计算而来的量化比例因子scale进行量化。假设量化位宽为n,scale的计算方式如下如下:
量化阈值选择常见方法有:
针对weight的量化阈值大都默认选择一个卷积核对应一个量化阈值T的max方法,计算公式为:
针对featuremap量化,地平线的PTQ量化转换工具hb_mapper makertbin提供了多种校准方法,通过在yaml文件中配置calibration_type参数进行选择,主要有:
- max校准方法
选择输入的featuremap的最大值vmax,最小值vmin的绝对值作为阈值,计算公式为:T=max(abs(vmax),abs(vmin))T=max(abs(vmax),abs(vmin))T=max(abs(vmax),abs(vmin))另外,还可以在yaml中配置max_percentile参数来调整max校准的截取点,常用配置选项有:0.99999/0.99995/0.99990/0.99950/0.99900。 - kl散度校准方法
kl散度是用来计算量化后int数据的分布P和float的分布Q这两个分布的距离。通过遍历可能的截断范围,并根据每个截断范围进行量化,然后对比量化后的int数据分布和量化前float的数据分布,计算kl散度,找到kl散度最小的截断范围作为最终量化时使用的阈值。kl散度的计算公式如下:KL(P,Q)=∑i=1nPi(log2Pi−log2Qi)KL(P,Q)=\sum_{i=1}^n P_i(log_{2}{P_i}-log_{2}{Q_i})KL(P,Q)=i=1∑nu200bPiu200b(log2u200bPiu200b−log2u200bQiu200b) - mix校准方法
mix 是一个集成多种校准方法的搜索策略, 能够自动确定量化敏感节点,并在节点粒度上从不同的校准方法中挑选出最佳方法,最终构建一个融合了多种校准方法优势的组合校准方式。详细过程如下:
Step1:采用kl校准方法,计算当前模型中节点的量化敏感度(使用余弦相似度来衡量),将值小于特定阈值的节点定义为 量化敏感节点(对模型量化精度影响较大的节点)。
Step2:遍历所有量化敏感节点,在每一个节点上尝试Max、Max-Percentile 0.99995和KL三种校准方法, 并为该节点选出最佳的校准方法,最终得到Mix校准模型。
Step3:评估Mix、Max、Max-Percentile 0.99995和KL校准模型的累积误差情况,输出最优模型。 - default校准方法
default是一个自动搜索的策略, 会尝试从系列校准量化参数中获得一个相对效果较好的组合。详细过程如下:
Step1:尝试Max、Max-Percentile 0.99995和KL三种校准方法,计算得到分别的余弦相似度。 如果三种方法中的最高余弦相似度小于0.995,进入Step2;反之,返回最高相似度对应的阈值组合。
Step2:尝试Max-Percentile 0.99995和perchannel量化的组合方法,如果四种方法中的最高余弦相似度小于0.995,进入Step3; 反之,返回最高相似度对应的阈值组合。
Step3:选取Step2中最高余弦相似度对应的方法,应用非对称量化作为第5种方法,根据余弦相似度选取5种方案中的最佳方案, 返回对应的阈值组合。
参考文献
Nagel M, Fournarakis M, Amjad R A, et al. A white paper on neural network quantization[J]. arXiv preprint arXiv:2106.08295, 2021.
李博闻. 深度神经网络量化及其硬件加速研究[D].浙江大学,2022.DOI:10.27461/d.cnki.gzjdx.2022.000973.


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)