
模块概述
GDC畸变矫正模块可将输入的畸变图像通过用户预置的模组分辨率、畸变参数等
1. 硬件特性
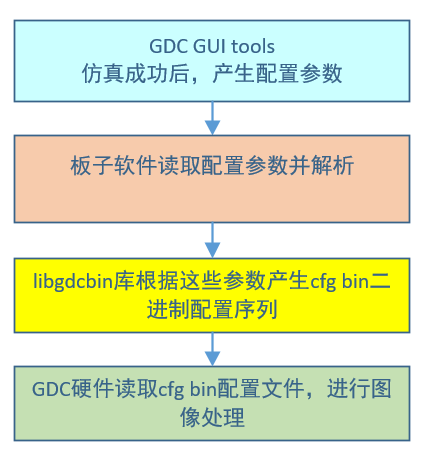
GDC使用框架由三个部分组成:
- GDC GUI Tools
一种方便用户设置转换参数的工具。仿真成功后,可生成配置文件参数。 - GDC cfg bin 二进制序列
系统软件使用配置文件参数,调用libgdcbin库生成GDC cfg bin 二进制序列,供GDC硬件读取处理。 - GDC硬件
执行存储器到存储器转换的硬件;即GDC的输入输出方式都是offline模式。
2. 功能描述
支持的输入典型尺寸为3840x2160,2688x1944,1920x1080,1280x720,640x480,480x320。
典型的应用场景是四路鱼眼镜头环视场景,可以对每一路鱼眼镜头进行畸变校正,最后把4张图片送给STITCH模块进行拼接。
3.接口使用说明
接口函数列表
函数名称 | 功能描述 |
|---|---|
hb_vio_gen_gdc_cfg | 生成GDC配置。 |
hb_vio_set_gdc_cfg | 设置GDC参数 |
hb_vio_free_gdc_cfg | 释放之前分配的,用于存放GDC配置的内存 |
hb_vio_run_gdc | 进行GDC图像处理 |
hb_vio_free_gdcbuf | 释放GDC图像的buffer |
hb_vio_set_gdc_cfg_opt | 设置GDC参数。J5 GDC硬件只有一个; id号固定是0,和hb_vio_set_gdc_cfg功能没有区别 |
hb_vio_run_gdc_opt | 进行GDC图像处理。但J5 GDC硬件只有一个; id号固定是0,和hb_vio_run_gdc功能没有区别 |
hb_vio_run_gdc_adv | 使用用户自定义的配置,进行GDC图像处理 |
hb_vio_run_gdc_adv_user | 使用用户自定义的配置,并且指定输出buffer的地址,进行GDC图像处理 |
- hb_vio_gen_gdc_cfg
【函数声明】
int hb_vio_gen_gdc_cfg(param_t *gdc_param, window_t *windows, uint32_t wnd_num, void **cfg_buf, uint64_t *cfg_size);
【功能描述】
u3000生成GDC配置。
【参数描述】参数名称
描述
输入/输出
param_t *gdc_param
图像基本信息
输入
window_t *windows
图像处理参数信息
输入
uint32_t wnd_num
图像处理信息数量,若有1个window则填写1。
输入
void **cfg_buf
生成的bin buffer, buffer 由函数内部分配,使用完成后需要释放。
输出
uint64_t *cfg_siz
生成bin buffer 长度。
输出
u3000u3000成功:0
u3000u3000失败:负值错误码。
u3000u3000【注意事项】
u3000u3000生成gdc-bin buffer 使用结束后需要释放,否则会造成内存泄漏。
- hb_vio_set_gdc_cfg
【函数声明】
int hb_vio_set_gdc_cfg(uint32_t pipeline_id, uint32_t* cfg_buf, uint64_t cfg_size)
【功能描述】
u3000设置GDC参数。
【参数描述】参数名称
描述
输入/输出
uint32_t pipeline_id
pipe_line 号
输入
uint32_t* cfg_buf
gdc-bin buf
输入
uint64_t cfg_size
gdc-bin buf 长度
输入
u3000u3000成功:0
u3000u3000失败:负值错误码。
- hb_vio_free_gdc_cfg
【函数声明】
u3000void hb_vio_free_gdc_cfg(uint32_t* cfg_buf)
【功能描述】
u3000释放之前分配的,用于存放GDC配置的内存。
【参数描述】参数名称
描述
输入/输出
uint32_t* cfg_buf
gdc-bin buf
输入
u3000u3000成功:0
u3000u3000失败:负值错误码。
- hb_vio_run_gdc
【函数声明】
u3000u3000int32_t hb_vio_run_gdc(uint32_t pipeline_id,
u3000u3000 hb_vio_buffer_t * src_img_info,
u3000u3000 hb_vio_buffer_t * dst_img_info,
u3000u3000 int32_t rotate)
【功能描述】
u3000u3000进行GDC图像处理。
u3000u3000注:src_img_info,即输入buffer,通过调用hb_vio_get_data获取。dst_img_info,即输出buffer,是从hb_vio_run_gdc函数内部获取到,并传递给用户。
【参数描述】参数名称
描述
输入/输出
uint32_t pipeline_id
软件通道号
输入
hb_vio_buffer_t * src_img_info
输入数据图像信息
输入
hb_vio_buffer_t * dst_img_info
输出数据图像信息
输出
int32_t rotate
要翻转的角度
输入
u3000u3000成功:0
u3000u3000失败:负值错误码。
- hb_vio_free_gdcbuf
【函数声明】
u3000int32_t hb_vio_free_gdcbuf(uint32_t pipeline_id, hb_vio_buffer_t * dst_img_info)
【功能描述】
u3000u3000释放GDC图像的buffer。
【参数描述】参数名称
描述
输入/输出
uint32_t pipeline_id
软件通道号
输入
hb_vio_buffer_t * dst_img_info
数据图像信息
输入
u3000u3000成功:0
u3000u3000失败:负值错误码。
- hb_vio_set_gdc_cfg_opt
u3000【函数声明】
u3000u3000int32_t hb_vpm_set_gdc_cfg_opt(uint32_t pipeline_id,
u3000u3000 uint32_t gdc_id,
u3000u3000 const uint32_t* cfg_buf,
u3000u3000 uint64_t cfg_size)
u3000【功能描述】
u3000u3000设置GDC参数。
u3000u3000J5 GDC硬件只有一个; id号固定是0,和hb_vio_set_gdc_cfg功能没有区别。
u3000【参数描述】参数名称
描述
输入/输出
uint32_t pipeline_id
pipe_line 号
输入
uint32_t gdc_id
GDC硬件id
输入
uint32_t* cfg_buf
gdc-bin buf
输入
uint64_t cfg_size
gdc-bin buf 长度
输入
u3000u3000成功:0
u3000u3000失败:负值错误码。
- hb_vio_run_gdc_opt
u3000【函数声明】
u3000u3000int32_t hb_vio_run_gdc_opt(uint32_t pipeline_id,
u3000u3000 uint32_t gdc_id,
u3000u3000 const hb_vio_buffer_t * src_img_info,
u3000u3000 hb_vio_buffer_t * dst_img_info,
u3000u3000 int32_t rotate)
u3000【功能描述】
u3000u3000进行GDC图像处理。
u3000u3000但J5 GDC硬件只有一个; id号固定是0,和hb_vio_run_gdc功能没有区别。
u3000【参数描述】参数名称
描述
输入/输出
uint32_t pipeline_id
软件通道号
输入
uint32_t gdc_id
GDC硬件id
输入
hb_vio_buffer_t * src_img_info
输入数据图像信息
输入
hb_vio_buffer_t * dst_img_info
输出数据图像信息
输出
int32_t rotate
要翻转的角度
输入
u3000u3000成功:0
u3000u3000失败:负值错误码。
- hb_vio_run_gdc_adv
u3000【函数声明】
u3000u3000int32_t hb_vio_run_gdc_adv(
u3000u3000 uint32_t pipeline_id,
u3000u3000 uint32_t gdc_id,
u3000u3000 const gdc_config_t *gdc_cfg,
u3000u3000 const hb_vio_buffer_t * src_img_info,
u3000u3000 hb_vio_buffer_t * dst_img_info,
u3000u3000 int32_t rotate)
u3000【功能描述】
u3000u3000使用用户自定义的配置,进行GDC图像处理。
注:与hb_vio_run_gdc_adv_user的差异是,该接口的输出buffer由函数内部获取。相对于 hb_vio_run_gdc,该接口多一个可自定义配置的功能,hb_vio_set_gdc_cfg无需调用。
【参数描述】参数名称
描述
输入/输出
uint32_t pipeline_id
软件通道号
输入
uint32_t gdc_id
GDC硬件id
输入
const gdc_config_t *gdc_cfg
用户自定义的配置
输入
hb_vio_buffer_t * src_img_info
输入数据图像信息
输入
hb_vio_buffer_t * dst_img_info
输出数据图像信息
输出
int32_t rotate
要翻转的角度
输入
u3000u3000成功:0
u3000u3000失败:负值错误码。
- hb_vio_run_gdc_adv_user
【函数声明】
u3000int32_t hb_vio_run_gdc_adv_user(
u3000u3000 uint32_t pipeline_id,
u3000u3000 uint32_t gdc_id,
u3000u3000 const gdc_config_t *gdc_cfg,
u3000u3000 const hb_vio_buffer_t * src_img_info,
u3000u3000 hb_vio_buffer_t * dst_img_info,
u3000u3000 int32_t rotate)
【功能描述】
u3000使用用户自定义的配置,并且指定输出buffer的地址,进行GDC图像处理。
注:与hb_vio_run_gdc_adv的差异是,该接口的输出buffer由外部分配。相对于hb_vio_run_gdc,该接口多一个可自定义配置的功能,hb_vio_set_gdc_cfg无需调用。
【参数描述】参数名称
描述
输入/输出
uint32_t pipeline_id
软件通道号
输入
uint32_t gdc_id
GDC硬件id
输入
const gdc_config_t *gdc_cfg
用户自定义的配置
输入
hb_vio_buffer_t * src_img_info
输入数据图像信息
输入
hb_vio_buffer_t * dst_img_info
输出数据图像信息
输出
u3000u3000成功:0
u3000u3000失败:负值错误码。
4. 接口调用流程
- 回灌流程
回灌流程,指的是系统存储中读取文件,作为GDC的输入图像,进行处理。
典型调用流程图如下: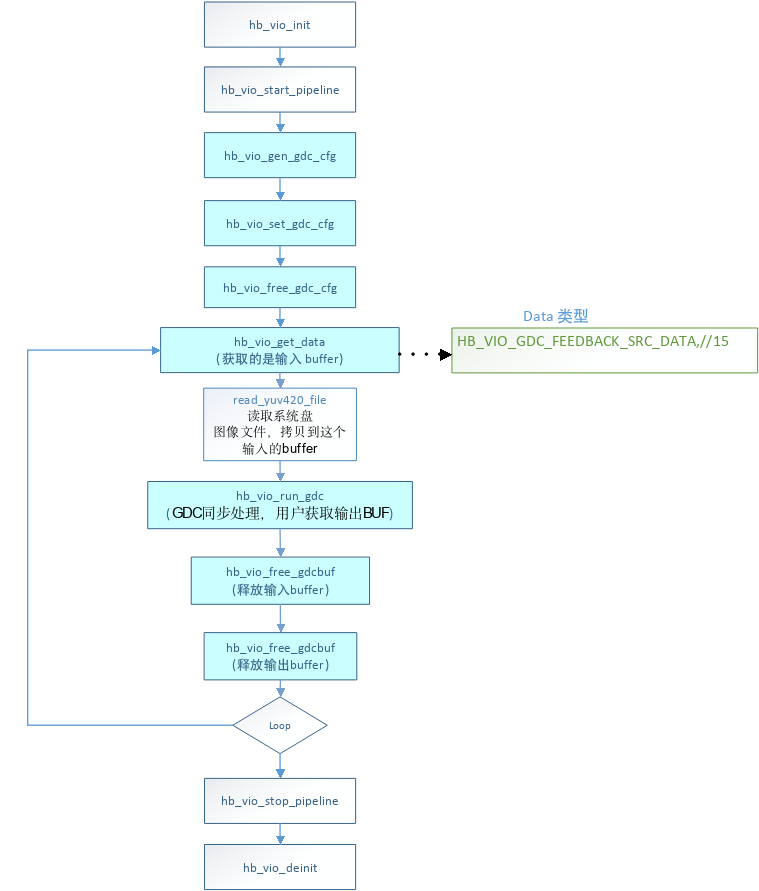
- 使用自定义GDC配置,和默认使用的区别,主要是hb_vio_set_gdc_cfg 的内容由接口直接带入,无需hb_vio_set_gdc_cfg接口。
调用流程图如下: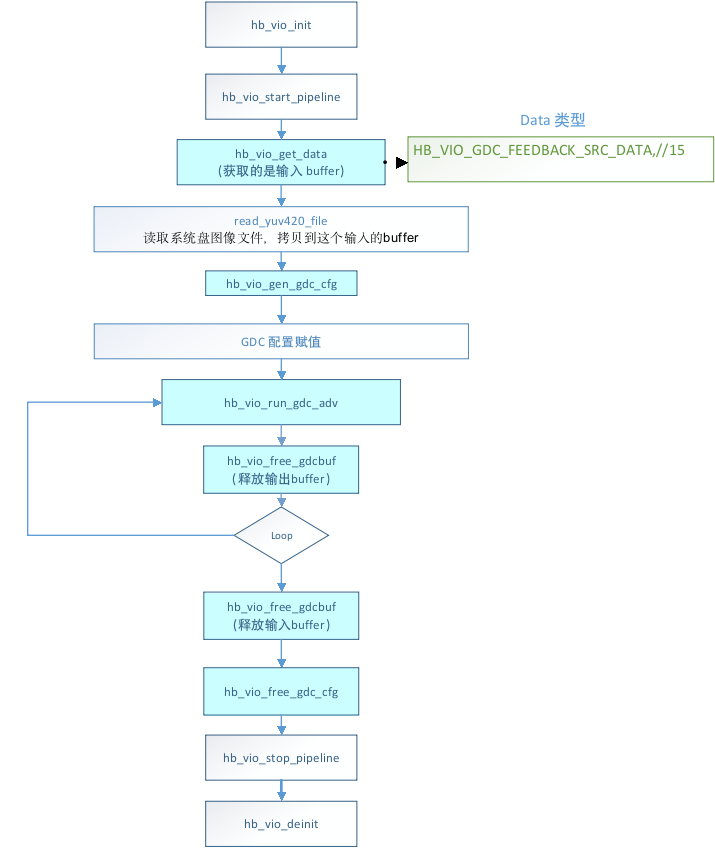
- 使用自定义GDC配置,加上层分配输出buffer的调用流程图如下:
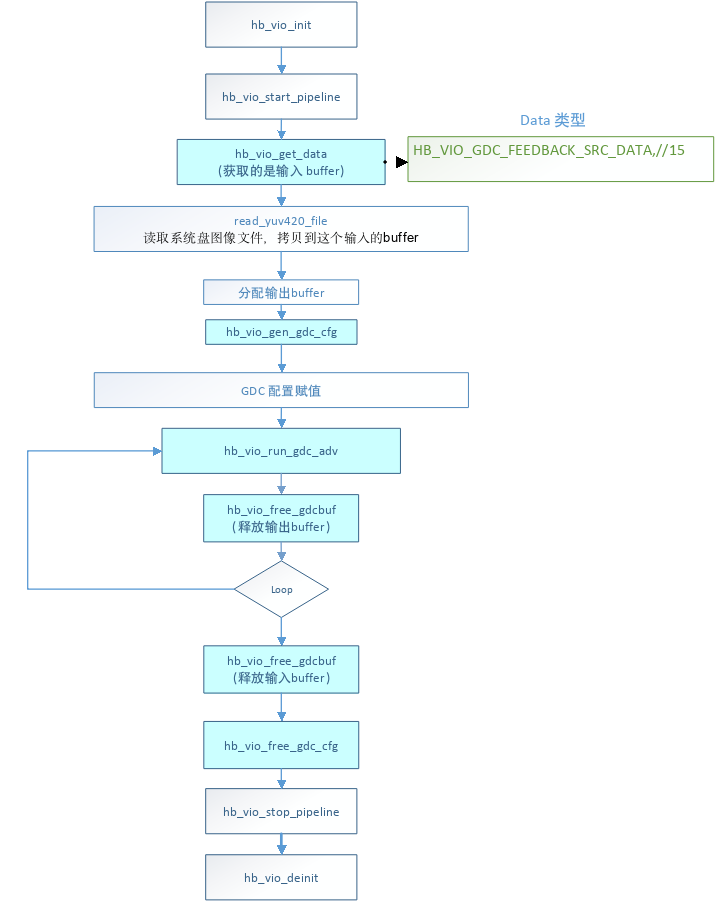 u3000
u3000 - 模块间处理流程
模块间处理流程,指的是从其他硬件IP模块输出的数据拿来作为GDC的输入图像,进行处理。
典型的是从PYM 输出某一层的YUV数据,拿来作为GDC图像处理的输入。处理流程图如下: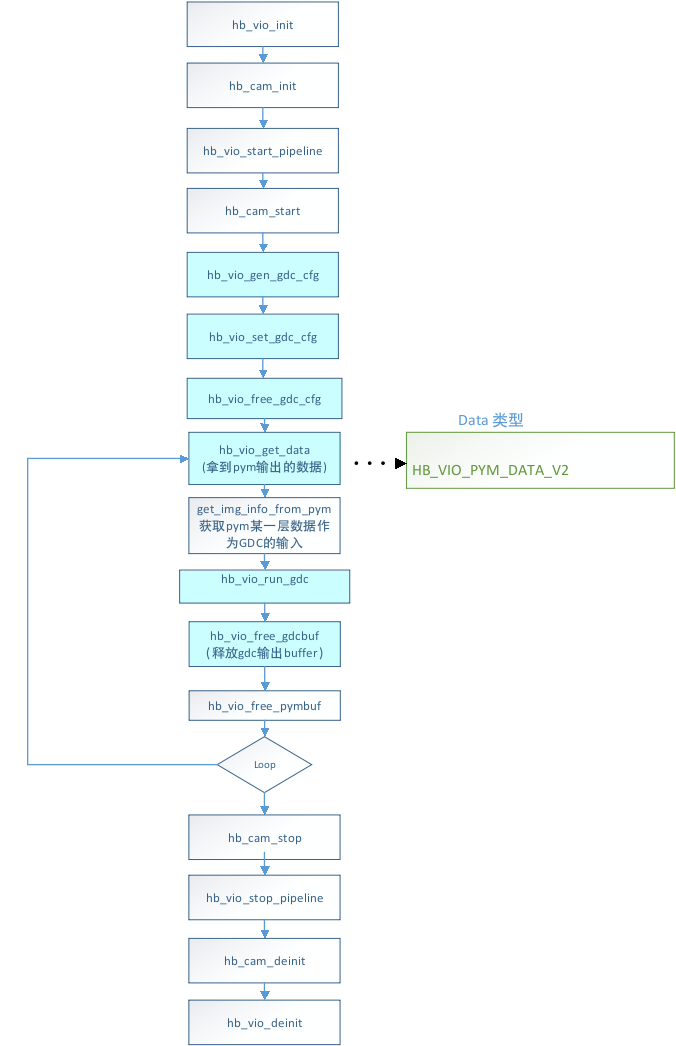
- GDC driver与PYM driver底层联动功能
该功能有关的Json配置如下:layer_num_transfer_gdc代表选取PYM输出层直接传递给GDC进行处理,PYM输出层的枚举如下:
在已生成GDC binary的情况下,实际软件工作流程如下: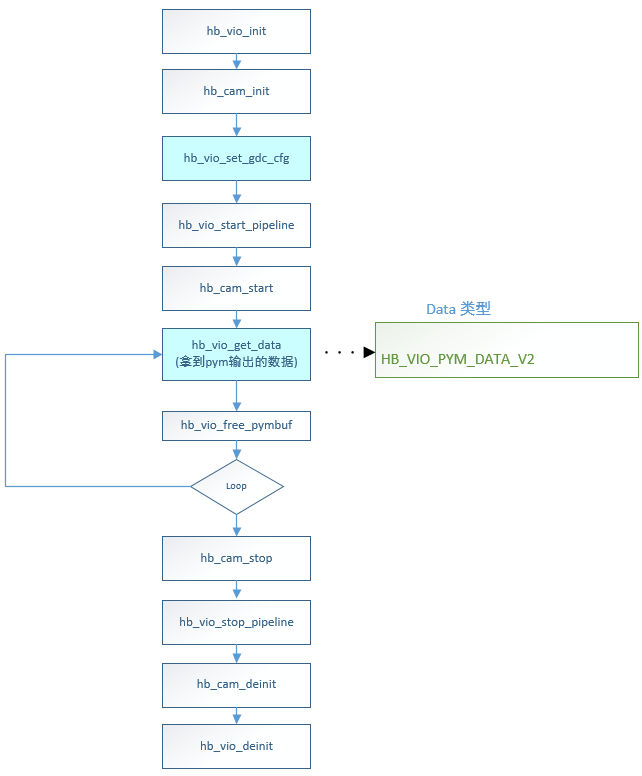
5. 关键数据结构体
- frame_format_t
【结构定义】
u3000u3000typedef enum {
u3000u3000FMT_UNKNOWN,
u3000u3000FMT_LUMINANCE,
FMT_PLANAR_444,
FMT_PLANAR_420,
FMT_SEMIPLANAR_420
u3000u3000} frame_format_t;
【功能描述】
u3000u3000数据处理格式
【成员说明】成员
含义
FMT_UNKNOWN
暂不支持
FMT_LUMINANCE
暂不支持
FMT_PLANAR_444
暂不支持
FMT_PLANAR_420
暂不支持
FMT_SEMIPLANAR_420
nv12格式使用该项
Note : J5中使用FMT_SEMIPLANAR_420类型,若图像类型使用不当会造成输出异常。
- resolution_t
u3000【结构定义】
u3000u3000typedef struct {
uint32_t w;
uint32_t h;
u3000u3000} resolution_t;
u3000【功能描述】
u3000u3000分辨率。
u3000【成员说明】成员
含义
uint32_t w
width in pixels
uint32_t h
height in pixels
param_t
u3000u3000typedef struct {
frame_format_t format;
resolution_t in;
resolution_t out;
int32_t x_offset;
int32_t y_offset;
int32_t diameter;
double fov;
u3000u3000} param_t;
u3000【功能描述】
u3000u3000GDC基本参数结构体。
u3000【成员说明】
成员 | 含义 |
|---|---|
frame_format_t format | 处理图像格式 |
resolution_t in | 实际输入图像尺寸 |
resolution_t out | 实际输出图像尺寸 |
int32_t x_offset | 输入区域沿X轴偏移的像素数。 |
int32_t y_offset | 输入区域沿Y轴偏移的像素数。建议:default 0 |
int32_t diameter | 定义矩形输入图像上包含实际鱼眼照片的输入圆形区域的像素直径。对于某些相机,此圆形图像区域的直径可以大于或小于矩形画布的尺寸(有时可能会被剪裁)。 |
double fov | 视场定义输入图像的可视角度,影响源网格的曲率。视场越大,透视变形越大。 |
Note : 一般情况下diameter应保持与input.height一致。
- rect_t
u3000【结构定义】
u3000u3000typedef struct {
int32_t x;
int32_t y;
int32_t w;
int32_t h;
u3000u3000} rect_t;
u3000【功能描述】
u3000u3000区域信息结构体。
u3000【成员说明】成员
含义
int32_t x
Start x coordinate
int32_t y
Start y coordinate
int32_t w
width
int32_t h
height
- point_t
u3000【结构定义】
typedef struct {
double x;
double y;
u3000u3000} point_t;
u3000【功能描述】
u3000u3000坐标点信息结构体。
u3000【成员说明】成员
含义
double x
x coordinate
double y
y coordinate
- transformation_t
u3000【结构定义】
u3000u3000typedef enum {
PANORAMIC,
CYLINDRICAL,
STEREOGRAPHIC,
UNIVERSAL,
CUSTOM,
AFFINE,
DEWARP_KEYSTONE
u3000u3000} transformation_t;
u3000【功能描述】
u3000u3000转换模式的枚举。
u3000【成员说明】
成员 | 对应GUI tool变换模式 | 含义 |
|---|---|---|
PANORAMIC | Equisolid | 全景变换 |
CYLINDRICAL | NA | NA |
STEREOGRAPHIC | Equisolid(cylinder) | 畸变校正与全景变换相同,但输出图像是圆柱全景图,而不是平面图。 |
UNIVERSAL | Equidistant | Equidistant等距变换 |
CUSTOM | Custom | 用户定制的变换,可定制用于变换的网格 |
AFFINE | Affine | 线性变换 |
DEWARP_KEYSTONE | Keystone+dewarping | 相对于等距变换,可以选择非等距,等距变换equidistant只是它特殊参数的一种 |
- custom_tranformation_t
【结构定义】
u3000u3000typedef struct {
uint8_t full_tile_calc;
uint16_t tile_incr_x;
uint16_t tile_incr_y;
int32_t w;
int32_t h;
double centerx;
double centery;
point_t* points;
u3000u3000} custom_tranformation_t;
【功能描述】
【成员说明】成员
含义
uint8_t full_tile_calc
full tile calculation flag
uint16_t tile_incr_x
tile increment in x
uint16_t tile_incr_y
tile increment in y
int32_t w
自定义转换网格中水平方向上的数字或点
int32_t h
自定义转换网格中垂直方向的数字或点
double centerx
center along x axis
double centery
center along y axis
point_t* points
config.txt转换序列, 数量 = w*h
- window_t
u3000【结构定义】
u3000u3000typedef struct {
rect_t out_r;
transformation_t transform;
rect_t input_roi_r;
int32_t pan;
int32_t tilt;
double zoom;
double strength;
double strengthY;
double angle;
double elevation;
double azimuth;
int32_t keep_ratio;
double FOV_h;
double FOV_w;
double cylindricity_y;
double cylindricity_x;
char custom_file[128];
custom_tranformation_t custom;
double trapezoid_left_angle;
double trapezoid_right_angle;
u3000u3000} window_t;
【功能描述】
【成员说明】成员
含义
rect_t out_r
Output window position and size
transformation_t transform
Used transformation
rect_t input_roi_r
roi 区域
int32_t pan
沿变换曲面沿水平方向以给定数量的像素偏移变换网格。
int32_t tilt
沿变换曲面沿垂直方向将变换网格偏移给定数量的像素。
zoom
按提供的因子缩放转换输出
double strength
沿X轴的变换强度(非负参数)
double strengthY
沿Y轴的变换强度(非负参数)。
double angle(rotation)
区域将在其轴上旋转的角度
double elevation
指定主投影轴的角度(度)
double azimuth
指定主投影轴的角度,从北向(正向东)顺时针计数
int32_t keep_ratio
在水平和垂直方向上保持相同的拉伸强度(enable/disable)
double FOV_h
垂直尺寸输出视场的大小(度)
double FOV_w
水平尺寸输出视场的大小(度)
double cylindricity_y
垂直方向目标投影形状的圆柱度水平
double cylindricity_x
水平方向目标投影形状的圆柱度水平
char custom_file[128]
File name of the file containing custom transformation description
custom_tranformation_t custom
Parsed custom transformation structure
double trapezoid_left_angle
Left Acute angle in degrees between trapezoid base and leg
double trapezoid_right_angle
Right Acute angle in degrees between trapezoid base and leg
6.错误返回值说明
错误返回值 | 错误返回值定义 | 错误码说明 |
|---|---|---|
7000 | #define HB_VIO_GDC_OPEN_DEV_FAIL | |
7003 | #define HB_VIO_GDC_UPDATE_FAIL | |
7012 | #define HB_VIO_GDC_BAD_VALUE | |
7013 | #define HB_VIO_GDC_NULL_POINTER | |
7014 | #define HB_VIO_GDC_PROCESS_FAIL | |
7016 | #define HB_VIO_GDC_INVALID_CONFIG | |
7020 | #define HB_VIO_GDC_SET_CFG_NULL | |
7021 | #define HB_VIO_GDC_SET_CFG_SIZE_INVALID | |
7022 | #define HB_VIO_GDC_RUN_SRC_BUF_NULL | |
7024 | #define HB_VIO_GDC_RUN_INVALID_DEGREE | |
7025 | #define HB_VIO_GDC_RUN_INVALID_BUF | |
7026 | #define HB_VIO_GDC_RUN_ADV_CFG_NULL | |
7027 | #define HB_VIO_GDC_GEN_BAD_VALUE | |
7028 | #define HB_VIO_GDC_GEN_NULL_POINTER | |
7029 | #define HB_VIO_GDC_GEN_INIT_FAIL | |
7030 | #define HB_VIO_GDC_ALLOC_BUF_FAIL | |
7032 | #define HB_VIO_GDC_INVALID_DATATYPE | |
7033 | #define HB_VIO_GDC_GET_BUF_FAIL | |
7034 | #define HB_VIO_GDC_FREE_BUF_FAIL | |
7035 | #define HB_VIO_GDC_ALLOC_BIN_FAIL | |
7036 | #define HB_VIO_GDC_CFG_BIN_NULL | |
7037 | #define HB_VIO_GDC_INVALID_HW_ID | |
7038 | #define HB_VIO_GDC_RUN_DST_BUF_NULL | |
7039 | #define HB_VIO_GDC_GEN_WIN_NUM_ZERO | |
7040 | #define HB_VIO_GDC_GEN_PARAM_NULL | |
7041 | #define HB_VIO_GDC_GEN_WINDOW_NULL | |
7042 | #define HB_VIO_GDC_GEN_CFG_NULL | |
7043 | #define HB_VIO_GDC_GEN_CFG_SIZE_NULL | |
7044 | #define HB_VIO_GDC_GEN_INVALID_PARAMETER | |
7047 | #define HB_VIO_GDC_FORCE_STOP_FAIL | |
7048 | #define HB_VIO_GDC_HANDLE_NULL_POINTER | |
7049 | #define HB_VIO_GDC_BUF_MANAGER_NULL_POINTER | |
7050 | #define HB_VIO_GDC_GET_OUTPUT_BUF_FAIL | |
7051 | #define HB_VIO_GDC_BUF_NULL | |
7052 | #define HB_VIO_GDC_BUF_PLANE_COUNT_INVALID | |
7054 | #define HB_VIO_GDC_JSON_ROOT_NULL_POINTER | |
7055 | #define HB_VIO_GDC_CFG_NULL_POINTER | |
7056 | #define HB_VIO_GDC_ALLOC_BINARY_FAIL | |
7057 | #define HB_VIO_GDC_ALLOC_FEEDBACK_BUF_FAIL | |
7059 | #define HB_VIO_GDC_INVALID_USEER_MODE | |
7060 | #define HB_VIO_GDC_SRC_BIND_GROUP_FAIL |
- 错误描述
以下表格列出GDC API可能出现的错误返回值及原因。VPM GDC API
可能产生的返回值码
错误码说明
int32_t hb_vio_free_gdcbuf(uint32_t pipeline_id, hb_vio_buffer_t * dst_img_info)
HB_VIO_PIPELINE_ID_INVALID
输入的pipeline id 非法
HB_VIO_GDC_BUF_NULL
输入的GDC buffer参数指针为空
HB_VIO_PIPELINE_NULL_POINTER
配置的pipeline id 对应的数据管理指针为空,一般是输入的pipeline id 没有初始化过。
HB_VIO_INVALID_DATATYPE
数据类型无效
HB_VIO_PIPE_ENTITY_NULL_POINTER
GDC实例体指针为空
HB_VIO_GDC_INVALID_DATATYPE
获取GDC 数据的时候,设置的数据类型是无效的
HB_VIO_BUF_TYPE_INVALID
无效的内存类型
HB_VIO_BUF_NO_MARK_IN_USER_QUEUE
未在GDC 内存 user 队列找到对应的buffer
HB_VIO_GET_PEEK_BUF_NULL
获取GDC内存 user 队列的buffer失败
HB_VIO_GDC_BUF_MANAGER_NULL_POINTER
GDC的buffer 管理器指针为空
int32_t hb_vio_run_gdc(uint32_t pipeline_id,hb_vio_buffer_t * src_img_info,hb_vio_buffer_t * dst_img_info,int32_t rotate)
HB_VIO_PIPELINE_ID_INVALID
输入的pipeline id 非法
HB_VIO_GDC_RUN_SRC_BUF_NULL
GDC 源内存指针为空
HB_VIO_GDC_RUN_DST_BUF_NULL
GDC目标内存指针为空
HB_VIO_GDC_RUN_INVALID_DEGREE
输入的GDC 旋转角度无效
HB_VIO_PIPELINE_NULL_POINTER
配置的pipeline id 对应的数据管理指针为空,一般是输入的pipeline id 没有初始化 过。
HB_VIO_GDC_NULL_POINTER
GDC 实例体指针为空
HB_VIO_GDC_BUF_MANAGER_NULL_POINTER
GDC内存管理器指针为空
HB_VIO_GDC_RUN_INVALID_BUF
GDC的buffer 信息配置不对
HB_VIO_GDC_BUF_MGR_FAIL
获取GDC输出buffer 失败
HB_VIO_GDC_INVALID_CONFIG
GDC的配置信息不对
HB_VIO_GDC_BUF_PLANE_COUNT_INVALID
GDC 内存的plane count 非法
HB_VIO_GDC_PROCESS_FAIL
GDC底层设备处理失败
int32_t hb_vio_gen_gdc_cfg(param_t *gdc_parm, window_t *wnds,uint32_t wnd_num, void **cfg_buf, uint64_t *cfg_size)
HB_VIO_GDC_GEN_PARAM_NULL
输入的GDC 参数的指针为空
HB_VIO_GDC_GEN_WINDOW_NULL
输入的GDC窗口指针为空
HB_VIO_GDC_GEN_CFG_NULL
输入的GDC配置内存的指针为空
HB_VIO_GDC_GEN_CFG_SIZE_NULL
输入的GDC 配置大小的指针为空
HB_VIO_GDC_GEN_INVALID_PARAMETER
GDC参数的不对
HB_VIO_GDC_GEN_WIN_NUM_ZERO
输入的窗口数量为0
HB_VIO_GDC_GEN_NULL_POINTER
输入的GDC 窗口的custom 指针为空
HB_VIO_GDC_GEN_INIT_FAIL
GDC初始化失败
int32_t hb_vio_set_gdc_cfg(uint32_t pipeline_id, uint32_t* cfg_buf, uint64_t cfg_size)
HB_VIO_GDC_SET_CFG_NULL
输入GDC配置内存的指针为空
HB_VIO_PIPELINE_ID_INVALID
输入的pipeline id 非法
HB_VIO_PIPELINE_NULL_POINTER
配置的pipeline id 对应的数据管理指针为空,一般是输入的pipeline id 没有初始化过。
HB_VIO_INVALID_OPERATION
操作Pipeline 的状态不对
HB_VIO_GDC_NULL_POINTER
GDC实例体指针为空
HB_VIO_GDC_SET_CFG_SIZE_INVALID
GDC输入的配置size 大小非法
HB_VIO_GDC_CFG_BIN_NULL
GDC配置的bin文件指针为空
HB_VIO_GDC_UPDATE_FAIL
GDC配置bin文件刷新失败
int32_t hb_vio_set_gdc_cfg_opt(uint32_t pipeline_id, uint32_t* cfg_buf, uint64_t cfg_size)
HB_VIO_GDC_SET_CFG_NULL
输入GDC配置内存的指针为空
HB_VIO_PIPELINE_ID_INVALID
输入的pipeline id 非法
HB_VIO_PIPELINE_NULL_POINTER
配置的pipeline id 对应的数据管理指针为空,一般是输入的pipeline id 没有初始化过。
HB_VIO_INVALID_OPERATION
操作Pipeline 的状态不对
HB_VIO_GDC_NULL_POINTER
GDC实例体指针为空
HB_VIO_GDC_SET_CFG_SIZE_INVALID
GDC输入的配置size 大小非法
HB_VIO_GDC_CFG_BIN_NULL
GDC配置的bin文件指针为空
HB_VIO_GDC_UPDATE_FAIL
GDC配置bin文件刷新失败
HB_VIO_GDC_INVALID_HW_ID
无效的GDC硬件id
int32_t hb_vio_run_gdc_opt(uint32_t pipeline_id, uint32_t gdc_id, hb_vio_buffer_t * src_img_info, hb_vio_buffer_t * dst_img_info,int32_t rotate)
HB_VIO_GDC_INVALID_HW_ID
无效的GDC硬件id
HB_VIO_PIPELINE_ID_INVALID
输入的pipeline id 非法
HB_VIO_GDC_RUN_SRC_BUF_NULL
GDC源内存指针为空
HB_VIO_GDC_RUN_DST_BUF_NULL
GDC目标内存指针为空
HB_VIO_GDC_RUN_INVALID_DEGREE
输入的GDC 旋转角度无效
HB_VIO_PIPELINE_NULL_POINTER
配置的pipeline id 对应的数据管理指针为空,一般是输入的pipeline id 没有初始化过。
HB_VIO_GDC_NULL_POINTER
GDC实例体指针为空
HB_VIO_GDC_BUF_MGR_FAIL
获取GDC输出buffer 失败
HB_VIO_GDC_RUN_INVALID_BUF
GDC的buffer 信息配置不对
HB_VIO_GDC_GET_OUTPUT_BUF_FAIL
获取GDC的输出buffer 失败
HB_VIO_GDC_INVALID_CONFIG
GDC的配置信息不对
HB_VIO_GDC_BUF_PLANE_COUNT_INVALID
GDC内存的plane count 非法
HB_VIO_GDC_PROCESS_FAIL
GDC 底层设备处理失败
int32_t hb_vio_run_gdc_adv(uint32_t pipeline_id, uint32_t gdc_id,const gdc_config_t *gdc_cfg,hb_vio_buffer_t *src_img_info,hb_vio_buffer_t *dst_img_info,int32_t rotate)
HB_VIO_GDC_INVALID_HW_ID
无效的GDC硬件id
HB_VIO_PIPELINE_ID_INVALID
输入的pipeline id 非法
HB_VIO_GDC_RUN_SRC_BUF_NULL
GDC 源内存指针为空
HB_VIO_GDC_RUN_DST_BUF_NULL
GDC 目标内存指针为空
HB_VIO_GDC_RUN_INVALID_DEGREE
输入的GDC旋转角度无效
HB_VIO_PIPELINE_NULL_POINTER
配置的pipeline id 对应的数据管理指针为空,一般是输入的pipeline id 没有初始过。
HB_VIO_GDC_NULL_POINTER
GDC实例体指针为空
HB_VIO_GDC_BUF_MGR_FAIL
获取GDC输出buffer 失败
HB_VIO_GDC_RUN_INVALID_BUF
GDC的buffer 信息配置不对
HB_VIO_GDC_INVALID_CONFIG
GDC的配置信息不对
HB_VIO_GDC_BUF_PLANE_COUNT_INVALID
GDC内存的plane count 非法
HB_VIO_GDC_PROCESS_FAIL
GDC底层设备处理失败
HB_VIO_GDC_RUN_ADV_CFG_NULL
GDC输入的高级配置的指针为空
int32_t hb_vio_run_gdc_adv_user(uint32_t pipeline_id, uint32_t gdc_id,const gdc_config_t *gdc_cfg,hb_vio_buffer_t *src_img_info,hb_vio_buffer_t *dst_img_info,int32_t rotate)
HB_VIO_GDC_INVALID_HW_ID
无效的GDC硬件id
HB_VIO_PIPELINE_ID_INVALID
输入的pipeline id 非法
HB_VIO_GDC_RUN_SRC_BUF_NULL
GDC 源内存指针为空
HB_VIO_GDC_RUN_DST_BUF_NULL
GDC 目标内存指针为空
HB_VIO_GDC_RUN_INVALID_DEGREE
输入的GDC旋转角度无效
HB_VIO_PIPELINE_NULL_POINTER
配置的pipeline id 对应的数据管理指针为空,一般是输入的pipeline id 没有初始过。
HB_VIO_GDC_NULL_POINTER
GDC实例体指针为空
HB_VIO_GDC_BUF_MGR_FAIL
获取GDC输出buffer 失败
HB_VIO_GDC_RUN_INVALID_BUF
GDC的buffer 信息配置不对
HB_VIO_GDC_INVALID_CONFIG
GDC的配置信息不对
HB_VIO_GDC_BUF_PLANE_COUNT_INVALID
GDC内存的plane count 非法
HB_VIO_GDC_PROCESS_FAIL
GDC底层设备处理失败
HB_VIO_GDC_RUN_ADV_CFG_NULL
GDC输入的高级配置的指针为空

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)