
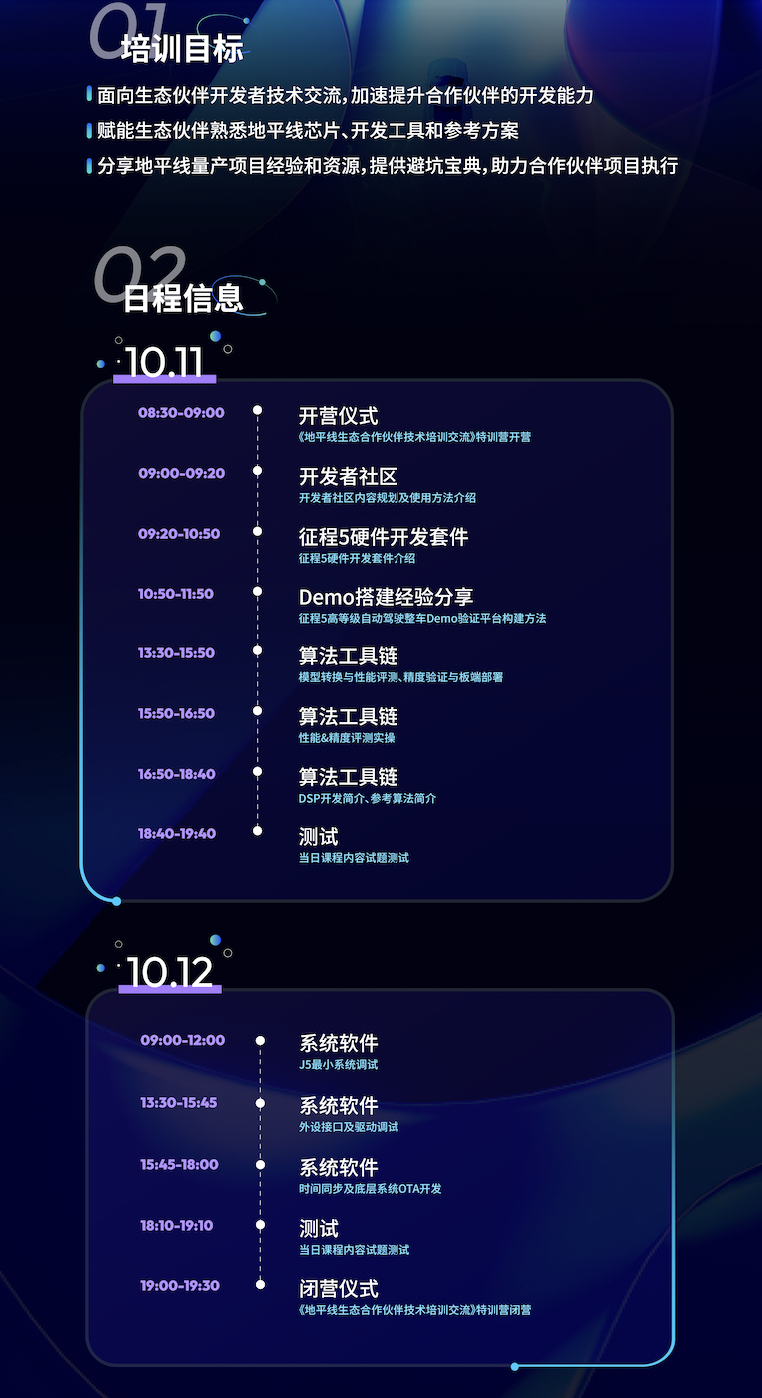
亲爱的地平线开发者们!欢迎来到《地平线生态合作伙伴技术培训交流》特训营,请点击海报查看日程信息,地平线期待与您相见在上海!AI ON HORIZON!
云相册现场直播:

本期培训内容需要您提前配置电脑环境:
工具链部分:
由于实操环节需要在个人开发机完成模型转换以及精度验证,在开发板完成性能评测等操作,因此请大家务必在参加11日工具链培训之前完成相关开发环境的部署:
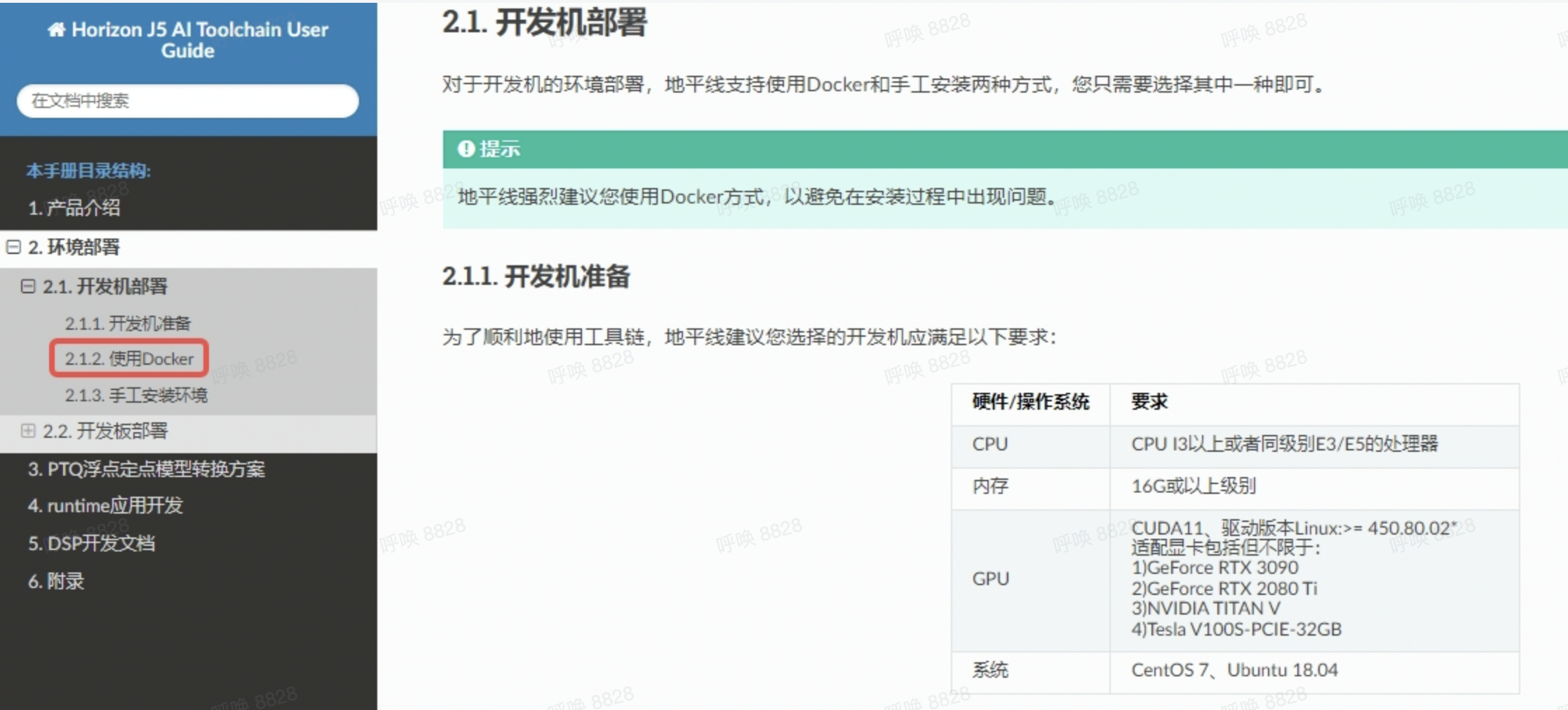
开发机环境部署:具体方式请参考J5工具链用户手册 “2.1节 开发机环境部署”(推荐大家使用docker,避免污染本地开发环境):

2. 板端环境部署:请提前下载好 OE1.1.22开发包,并完成解压,10/11日当天大家会领取到开发板 ip,届时各组学员需依据要求自行完成板端环境部署:
docker镜像离线下载链接:wget -c ftp://j5ftp@vrftp.horizon.ai/OpenExplorer/v1.1.22_release/docker_openexplorer_centos_7_j5_v1.1.22.tar.gz --ftp-password=j5ftp@123$%
docker镜像在线拉取方式:docker pull openexplorer/ai_toolchain_centos_7_j5:v1.1.22
docker镜像运行命令:docker run -it --rm -v `pwd`:/open_explorer openexplorer/ai_toolchain_centos_7_j5:v1.1.22
进入镜像后运行hb_mapper,可以查看到一些帮助信息即为环境安装成功
系统软件部分:
实操部分准备
A: 硬件准备(地平线准备)
J5DVB 1块;
MAX9296A子板 1块,单线束 1根;
MAX96712子板 1块,4合1线束 1根;
12V电源适配器 1个, 电源连接线 1根;
- micro usb线 1根(自备),车规网线 1根;
模组: SUNNY AR0820 1颗;
模组: SUNNY AR0233 4颗;
B: 软件环境
J5发布SDK(本次培训不需要):
终端工具,可连接串口,SSH,工具不限;
Linux环境下可直接使用: minicom, ssh命令;
3. hobotplayer工具: 用于接入Camera后查看图像使用;
最新版本: hobotplayerv.2.07.1.rar (下载链接如下)
https://pan.horizon.ai/index.php/s/ezbcTjyMYT7bxe4
C: 部分基本操作预先了解
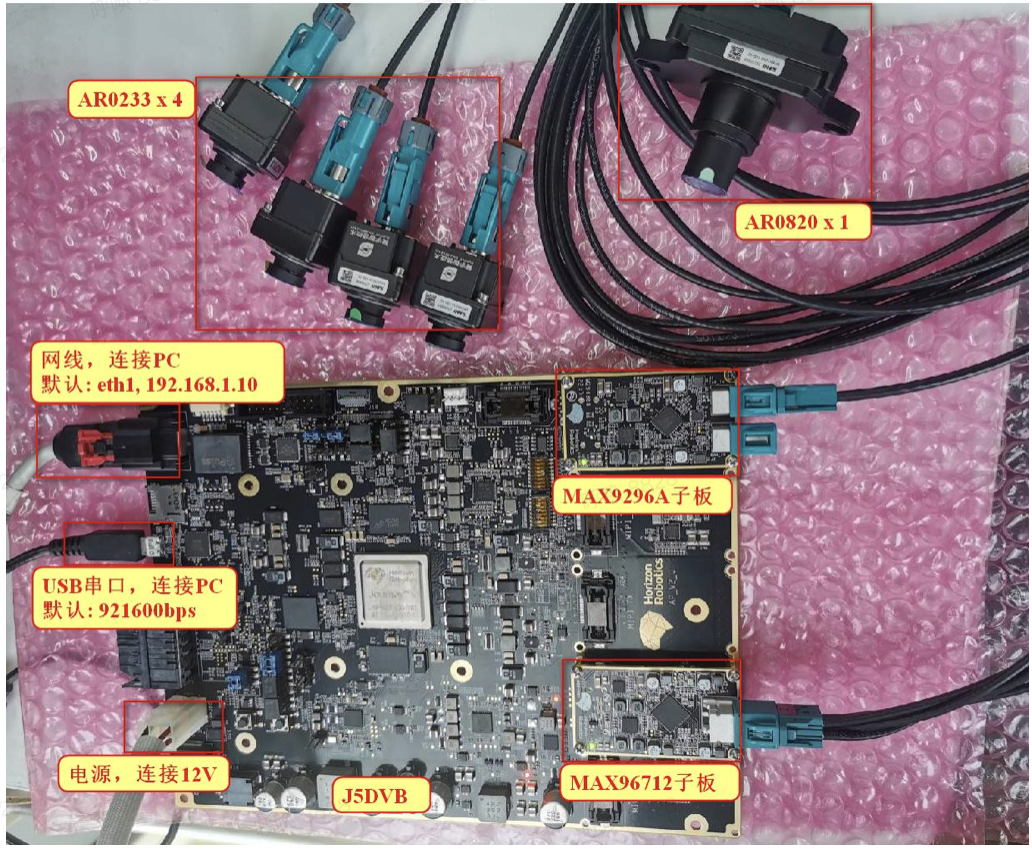
- 整板连接(模组连接根据实际场景需要,下为仅为示例参考)
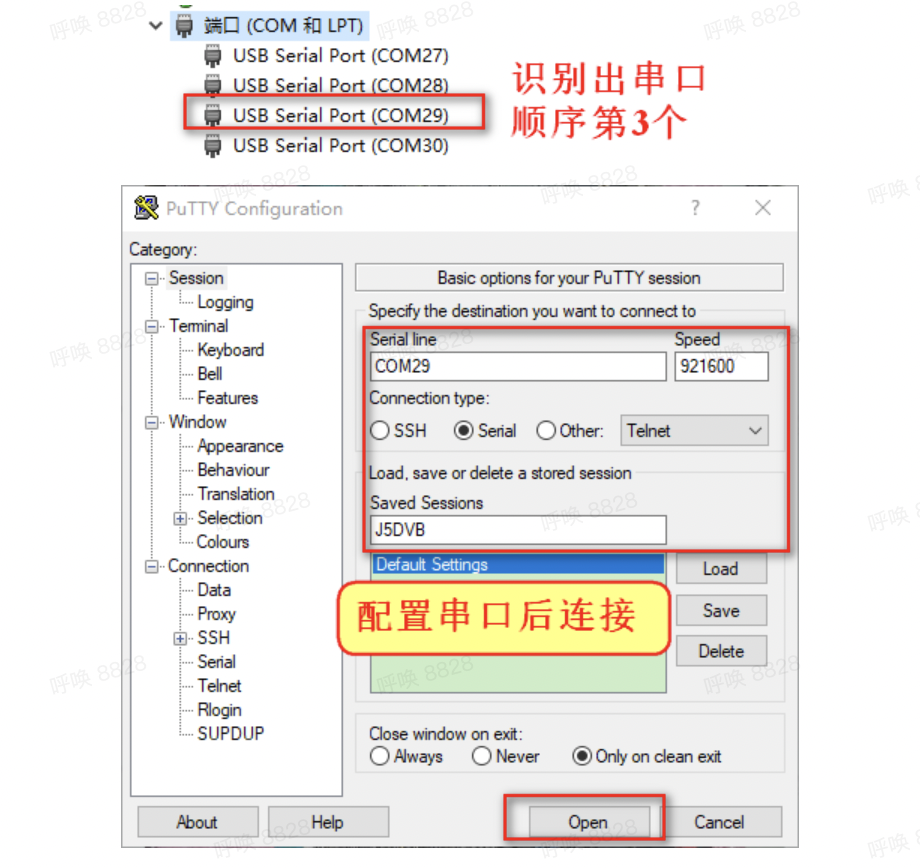
2. 串口配置
USB连接PC后将识别为3个串口,其中索引第3的为连接J5DVB的串口。
或minicom:

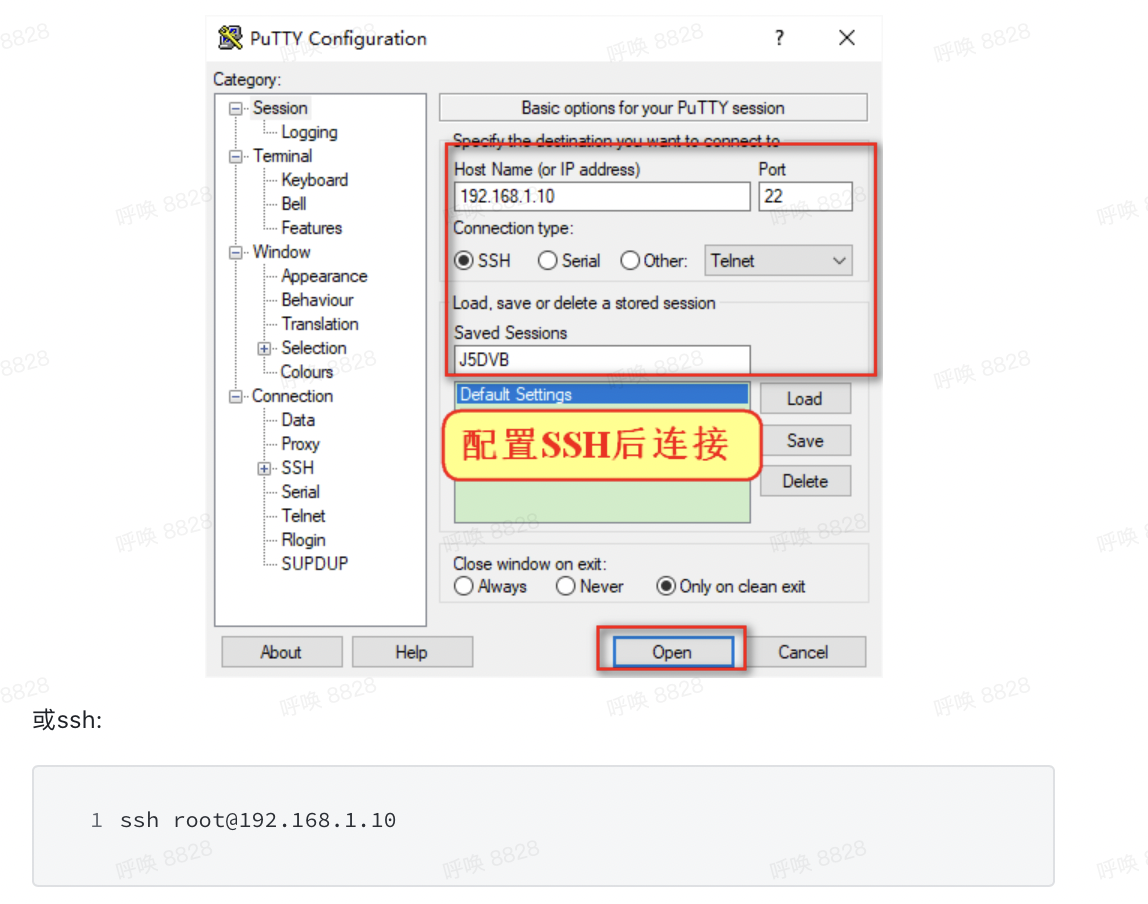
3. SSH连接
J5DVB连接网口使用eth1,默认IP为192.168.1.10
首先需将PC的网口设置为192.168.1.*
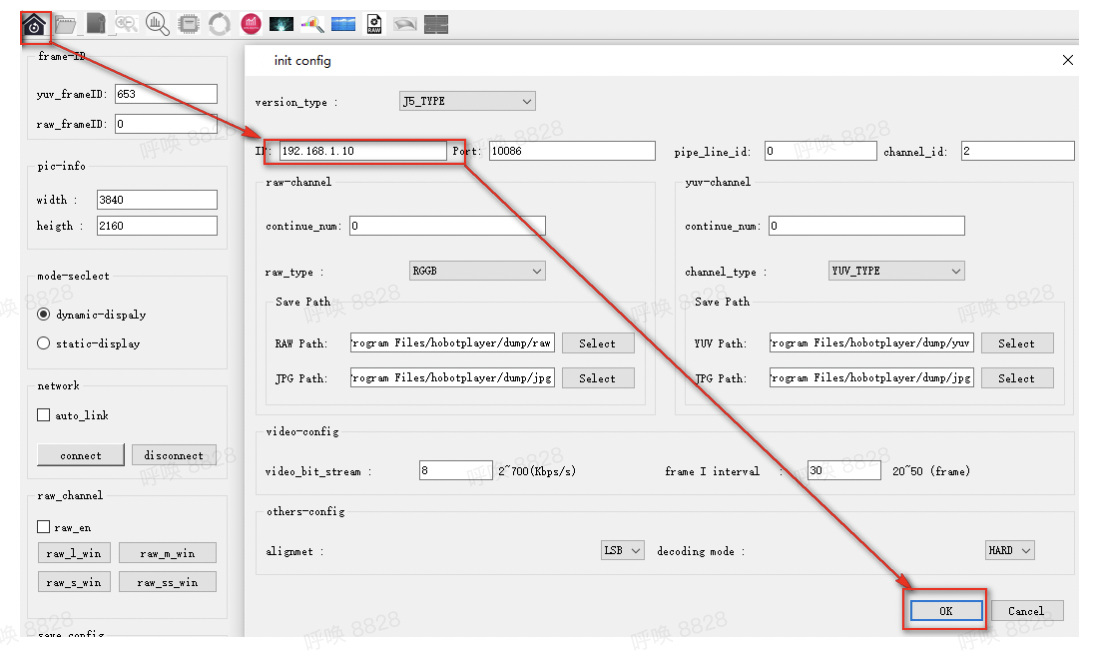
4. hobotplayer连接
直接解压工具,打开【dump_client.exe】:
配置IP:
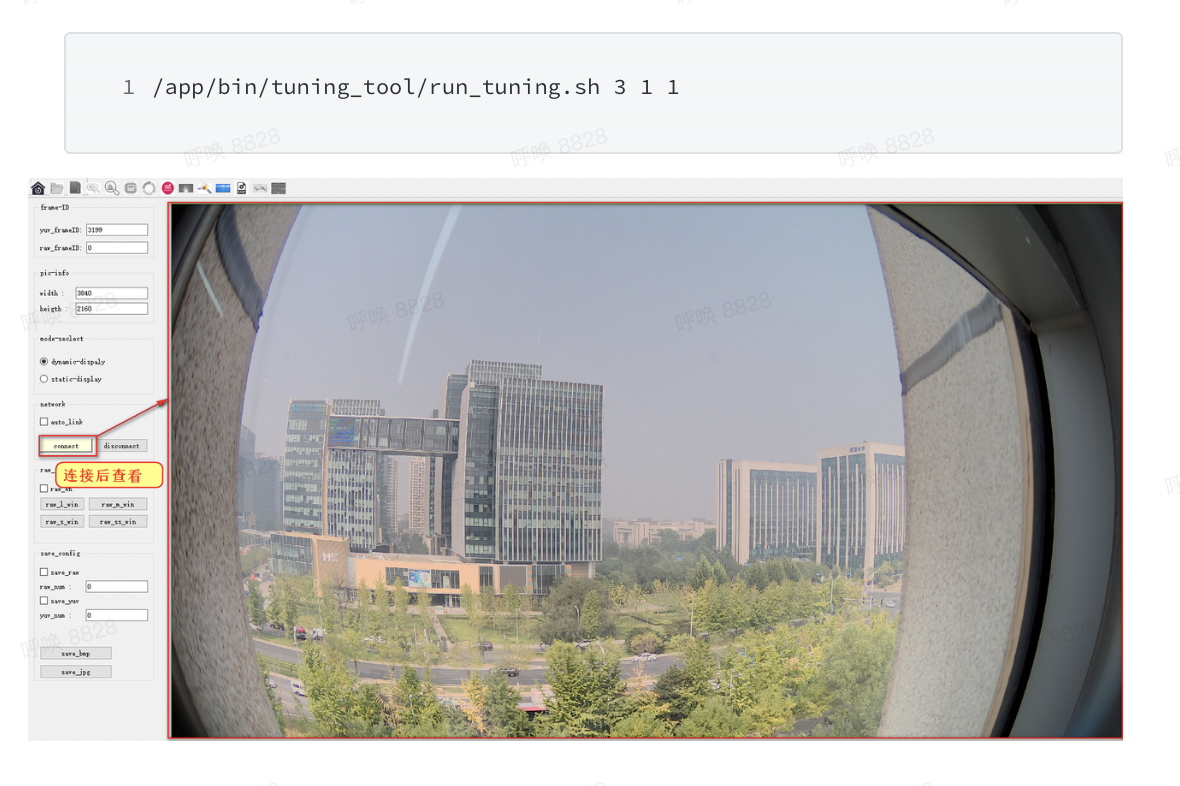
J5DVB上操作运行case(根据实操场景),如单路AR0820:


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)