
引言
征程6相比于征程5,在整体架构上得到了升级,相对应的,算法工具链的算子支持也得到了扩充,无论是算子支持的数量,还是BPU约束条件,征程6都有明显的加强,这就使得过去在征程5上无法部署的算法得以在征程6上成功部署。本文就以双目深度估计中比较经典的CGI算法为例,进行征程5和征程6算法工具链的编译部署对比。
CGI导出onnx
CGI是一种经典的双目深度估计算法,官方github地址为:https://github.com/gangweiX/CGI-Stereo
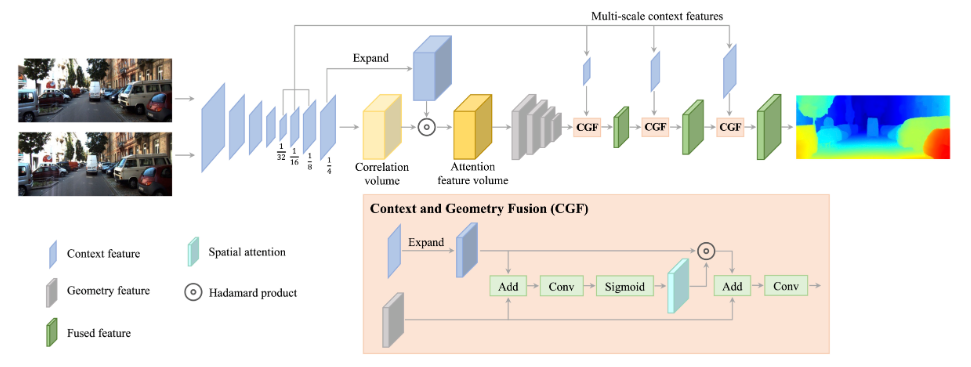
CGI提出了上下文与几何融合(CGF)模块,它能使上下文特征与几何特征有效互动,从而大大提高准确性。该算法还提出了一种新的cost volume,命名为注意力特征量(AFV),用于编码匹配信息和内容信息。这种精确、实时的立体匹配网络 CGI-Stereo在 KITTI 基准测试中的表现在当时优于所有其它已发布的实时方法,并显示出比其它实时方法更好的泛化能力。是一种非常经典的双目深度网络。
在将项目clone到本地后,我们可以编下如下脚本将网络导出为onnx。
这段代码的主要作用是将CGI算法导出为ONNX格式。具体解释如下:
- 导入库:首先,导入了PyTorch、ONNX、argparse和一个自定义模块models中的__models__。torch用于模型操作,onnx用于模型导出,argparse用于解析命令行参数,__models__是一个包含模型定义的字典。
- 命令行参数解析:通过argparse.ArgumentParser,定义了两个命令行参数:
- --model:选择模型的名称,默认是CGI_Stereo。
- --maxdisp:定义最大视差,默认值是192,用于设置立体匹配中的最大视差范围。
- 模型初始化:根据用户输入的model和maxdisp参数,从__models__字典中取出对应的模型构造函数,并用maxdisp参数初始化模型。
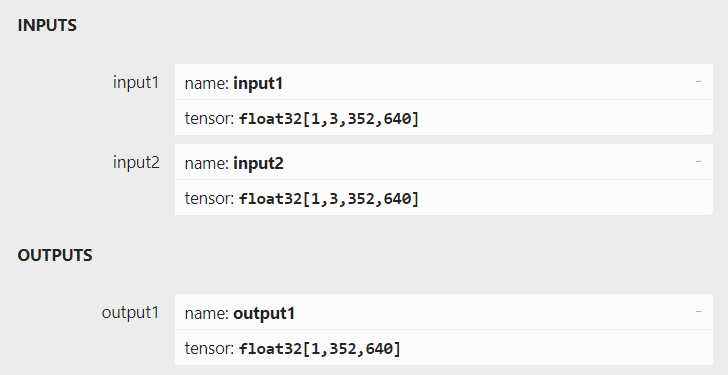
- 生成输入数据:创建两个随机的Tensor,分别代表左右图像输入,形状为(1, 3, 352, 640),即批次大小为1,3个颜色通道,图像尺寸为352x640。input_names和output_names分别定义了输入和输出张量的名称。
- 导出为ONNX格式:使用torch.onnx.export将PyTorch模型导出为ONNX格式。输入是刚刚创建的随机图像数据,输出的ONNX文件名是cgi.onnx,并指定了opset为11。input_names和output_names确保了输入和输出张量在ONNX模型中有明确的名称。
打开导出的onnx文件,模型的输入输出信息如下所示。
征程5编译
接下来,我们尝试使用征程5工具链编译该模型,使用指令如下。
转换过程中,便会生成编译器提示的报错信息。
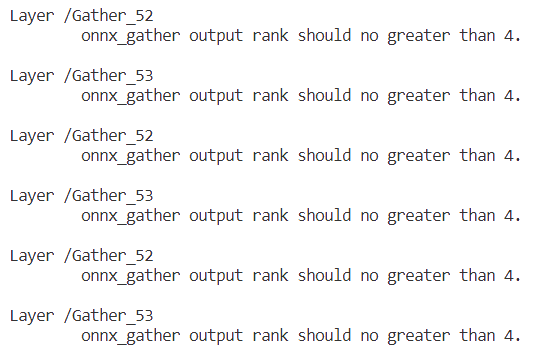
具体来说,就是Gather类型的算子,在征程5平台上不支持输出的维度超过4,而这个模型不满足要求,因此无法在征程5平台正常编译出来,PTQ链路的生成物就到quantized_model.onnx位置了。
因此,如果想在征程5部署这个算法,就意味着需要大改模型。
征程6编译
接下来,我们看一下这个onnx模型在征程6工具链上的表现,编译指令如下。
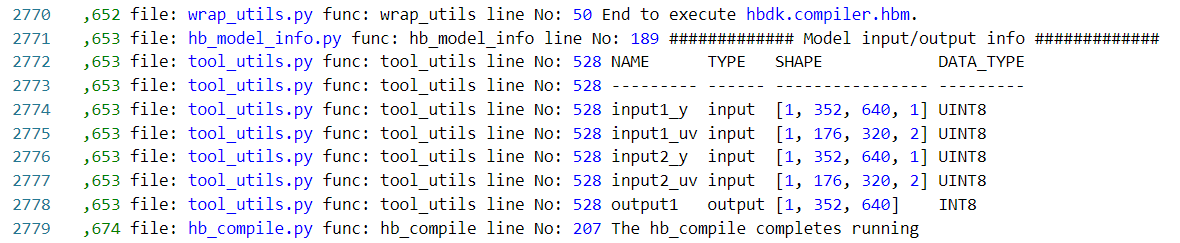
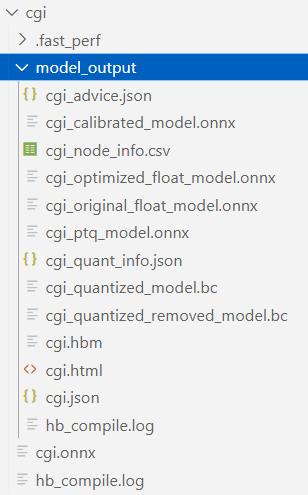
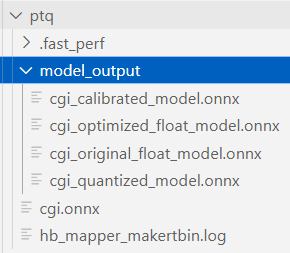
通过编译日志可以看出,这个模型已经编译成功,且两个输入分支自动转换成了2组y/uv的uint8输入。查看model_output文件夹,也是要啥有啥,文件齐全~
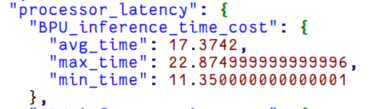
通过hrt_model_exec进行板端性能评测,该模型的BPU部分推理耗时为17ms左右,说明也是可以成功在板端进行推理的,之后就可以继续进行针对这个模型的性能优化和精度优化工作了~
总结
相比于征程5,征程6支持更多算子的高精度配置,如int16,fp16等,支持更多的算子运行在BPU,也对BPU约束放宽了条件,大部分算子约束条件减弱甚至没有约束。因此,一些在征程5计算平台上难以部署的模型,在征程6上往往能有比较好的表现。本文以CGI为例进行了说明,更多的算法模型大家可以自行探索~

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
