
1. 背景 ## 1.1 量化的误差来自于哪里 $$ quantizedvalue = clamp(round(\frac{floatvalue}{scale}), qmin, qmax) $$ 如上是一个标准的对称量化公式,产生误差的地方主要有: 1. round 产生的舍入误差。例如:当采用 int8 量化,scale 为 0.0078 时,浮点数值 0.0157 对应的定点值为 round(0.0157 / 0.0078) = round(2.0128) = 2, 浮点数值 0.0185 对应的定点值为 round(0.0185 / 0.0078) = round(2.3718) = 2。两者均产生了舍入误差,且由于舍入误差的存在,两者的定点值一致。 2. clamp 产生的截断误差。当 qmax * scale 无法覆盖需要量化的数值范围时,可能产生较大截断误差。例如:当采用 int8 量化,scale 为 0.0078 时,qmax * scale = 127 * 0.0078 = 0.9906,大于 0.9906 的值对应的定点值将被截断到 127。 ## 1.2 如何减小量化误差 1. 对于舍入误差,可以使用更小的 scale,这样可以使得单个定点值对应的浮点值范围变小。由于直接减小 scale 会导致截断误差,所以常用的方法是使用更高的精度类型,比如:将 int8 换成 int16,由于定点值范围变大, scale 将减小。 2. 对于截断误差,可以使用更大的 scale。scale 一般是由量化工具使用统计方法得到,scale 偏小的原因是校准数据不够全,校准方法不对,导致 scale 统计的不合理。比如:某一输入的理论范围为 [-1, 1],但校准或 qat 过程中,没有观测到最大值为 1 或最小值为 -1 的样本或观测到此类样本的次数太少。应该增加此类数据或者根据数值范围,手动设置固定 scale。在截断误差不大的情况下,可以调整校准参数,通过不同的校准方法和超参缓解截断误差。 ## 1.3 误差对模型精度的影响 量化必然产生误差,但误差对模型精度的影响程度却不同,原因如下: 1. 有些离群点有较大截断误差对模型几乎没有影响。 2. 不同算子对误差的敏感程度不同。例如:sigmoid,softmax 等算子,对输入在特定定义域内误差的容忍度比较高,而topk,sort等算子对误差非常敏感。 3. 模型具有一定的鲁棒性,泛化性,小的误差可以视作训练中的一种正则。 > 注意 基于这些原因,量化误差对模型精度的影响不应当只观察单算子量化误差,应当重点关注单算子量化对整个模型输出的影响,单算子误差只作为辅助参考。整个精度调优的过程是以观察量化对整个模型输出的影响为主,单算子误差为辅,不断调整量化配置缓解截断误差和舍入误差的过程。 # 2. 精度调优实战 本章以一个实际精度调优的例子介绍整个流程,请确保先看完工具链用户手册《量化感知训练-开发指南-量化精度调优指南》章节,了解相关的理论知识和工具用法。 ## 2.1 模型结构
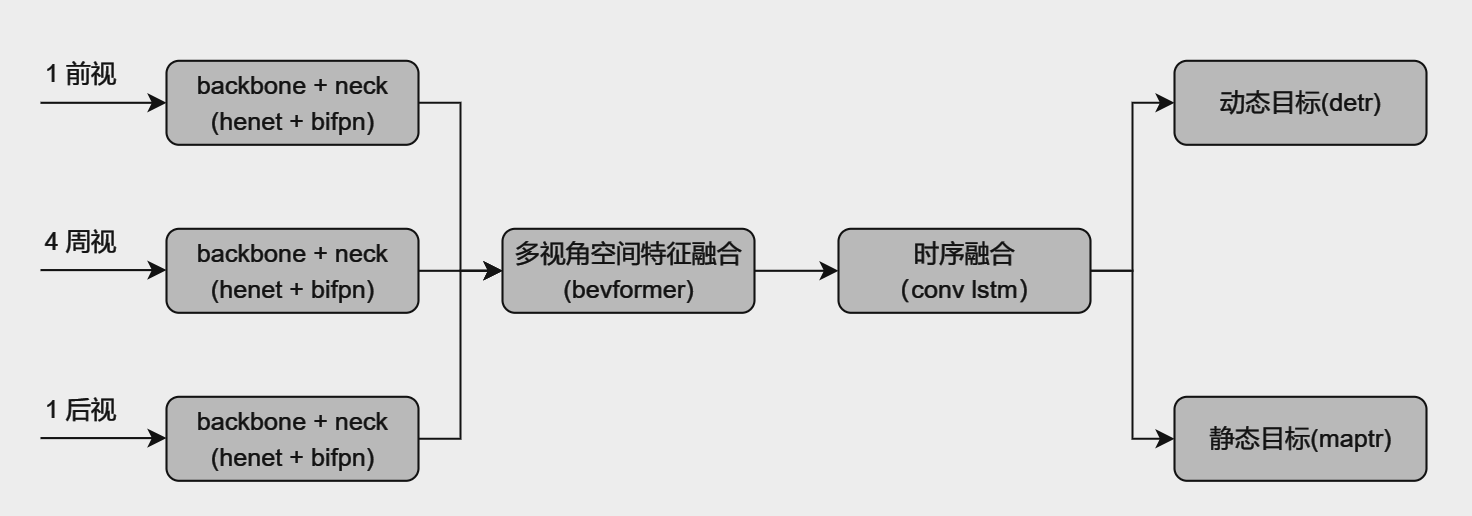 有这样一个典型的自动驾驶模型结构,输入分为前视/周视/后视,进行以下操作: 1. 分别使用各自的 backbone 提取特征,neck 做不同 level 的特征融合; 2. 不同视角的特征做空间特征融合; 3. 前后帧特征做时序融合; 4. 不同的 head 基于融合后的特征执行各自的任务; ## 2.2 模型结构和量化配置检查 在对模型做完 QAT 相关的适配和改造后,运行程序,运行目录下会生成 model_check_result.txt。 ### 2.2.1 算子融合检查 首先查看算子融合的情况,发现有少量算子未按照预期融合。 text Fusable modules are listed below: name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.0.0(shared) model.view_transformation._generated_add_0 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.1.0(shared) model.view_transformation._generated_add_2 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.2.0(shared) model.view_transformation._generated_add_4 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.3.0(shared) model.view_transformation._generated_add_6 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.4.0(shared) model.view_transformation._generated_add_8 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.5.0(shared) model.view_transformation._generated_add_10 查看 model.view_transformation.input_proj 模块。 python class BevFormer(BaseModule): def process_input(self, feats): ... for cam_idx in range(num_cameras): # 这里因动态block的存在,需要使用dynamic_block标注才能正常融合 with Tracer.dynamic_block(self, "bevformer_process_input"): src = cur_fpn_lvl_feat[cam_idx] bs, _, h, w = src.shape spatial_shape = (h, w) spatial_shapes.append(spatial_shape) src = self.input_proj[str(cam_idx)](src) src = src + self.cams_embeds[cam_idx][None, :, None, None] src = src + self.level_embeds[feat_idx][None, :, None, None] src = src.flatten(2).transpose(1, 2) src_flatten.append(src) ### 2.2.2 共享模块检查 called times > 1 的模块需要拆开。 text Each module called times: name called times --------------------------------------------------------------------------------------- -------------- ... model.map_head.sparse_head.decoder.gen_sineembed_for_position.div.reciprocal 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.div.mul 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.sin_model.sin 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.cos_model.cos 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.stack 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.cat 4 model.map_head.sparse_head.decoder.gen_sineembed_for_position.mul 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.dim_t_quant 4 ... calibration 或 qat 训练后发现精度比较差,使用 debug 工具时可以在逐层比较中观察这些共享算子的统计信息,base_model 为浮点模型,analy_model 为校准模型。以 model.map_head.sparse_head. decoder.gen_sineembed_for_position.div.mul 的其中两次调用为例,量化表示的最大值为 128 * 0.0446799 ≈ 5.719,在第一次使用中,输出范围明显小于 [-5.719, 5.719],误差较小, 第二次使用中,输出范围超出 [-5.719, 5.719],数值被截断,产生了较大误差。两次数值范围的差异也导致统计出的 scale 不准确。 text +------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+--------------------------------+---------------+------------+------------------+-------------------+------------------+-------------------+ | | mod_name | base_op_type | analy_op_type | shape | quant_dtype | qscale | base_model_min | analy_model_min | base_model_max | analy_model_max | |------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+--------------------------------+---------------+------------+------------------+-------------------+------------------+-------------------+ ... | 1227 | model.map_head.sparse_head.decoder.gen_sineembed_for_position.div | horizon_plugin_pytorch.nn.div.Div | horizon_plugin_pytorch.nn.qat.functional_modules.FloatFunctional.mul | torch.Size([1, 1600, 128]) | qint8 | 0.0446799 | 0.0002146 | 0.0000000 | 4.5935526 | 4.5567998 | ... | 1520 | model.map_head.sparse_head.decoder.gen_sineembed_for_position.div | horizon_plugin_pytorch.nn.div.Div | horizon_plugin_pytorch.nn.qat.functional_modules.FloatFunctional.mul | torch.Size([1, 1600, 128]) | qint8 | 0.0446799 | 0.0000000 | 0.0000000 | 6.2831225 | 5.7190272 | ... 查看 model.map_head.sparse_head.decoder.gen_sineembed_for_position 模块。 python class AnchorDeformableTransformerDecoder(nn.Module): def __init__(self, decoder_layer, num_layers, return_intermediate=False): ... # 构造不同的 gen_sineembed_for_position,拆开使用。 for i in range(len(self.layers)): self.add_module( "gen_sineembed_for_position%d" % (i), PositionEmbedding() ) def forward(...): ... for lid, layer in enumerate(self.layers): ref_shape = reference_points.shape assert ref_shape[-1] == 2 reference_points_reshape = reference_points.view(ref_shape[0], -1, 2) query_sine_embed = getattr(self, "gen_sineembed_for_position%d" % (lid))(reference_points_reshape) ... ### 2.2.3 qconfig 正确性检查 text input dtype statistics: +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ | module type | torch.float32 | qint8 | qint16 | qint32 | |----------------------------------------------------------------------------+-----------------+---------+----------+----------| | | 290 | 15 | 0 | 0 | | | 0 | 6 | 0 | 0 | | | 0 | 228 | 0 | 0 | | | 0 | 63 | 0 | 0 | | | 3 | 425 | 725 | 140 | | | 0 | 9 | 0 | 0 | | | 5 | 117 | 9 | 72 | | | 0 | 64 | 125 | 0 | | | 0 | 53 | 0 | 0 | | | 1 | 17 | 0 | 28 | | | 0 | 1 | 0 | 0 | | | 0 | 8 | 0 | 56 | | | 0 | 4 | 0 | 4 | | | 0 | 8 | 0 | 4 | | total | 299 | 1018 | 859 | 304 | +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ output dtype statistics: +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ | module type | torch.float32 | qint8 | qint16 | qint32 | |----------------------------------------------------------------------------+-----------------+---------+----------+----------| | | 0 | 123 | 182 | 0 | | | 0 | 6 | 0 | 0 | | | 0 | 228 | 0 | 0 | | | 0 | 63 | 0 | 0 | | | 0 | 341 | 716 | 64 | | | 0 | 9 | 0 | 0 | | | 0 | 85 | 18 | 100 | | | 0 | 55 | 134 | 0 | | | 0 | 53 | 0 | 0 | | | 0 | 18 | 0 | 28 | | | 0 | 1 | 0 | 0 | | | 0 | 8 | 0 | 56 | | | 0 | 4 | 0 | 0 | | | 12 | 0 | 0 | 0 | | total | 12 | 994 | 1050 | 248 | +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ Each layer out qconfig: +---------------------------------------------------------------------------------------------+----------------------------------------------------------------------------+--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------+-----------------+-------------------+--------------+ | Module Name | Module Type | Input dtype | out dtype | ch_axis | observer | |---------------------------------------------------------------------------------------------+----------------------------------------------------------------------------+--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------+-----------------+-------------------+--------------| ... | model.obstacle_head.reg_branches.0.0 | | ['qint8'] | ['qint32'] | -1 | MixObserver | ... | model.obstacle_head.reg_out_dequant0 | | ['qint8'] | [torch.float32] | qconfig = None | | 存在如下问题: 1. 存在 qint32 输出的算子。高精度输出体现在这里的表格中是 torch.float32,并不是 qint32,应该是 qconfig 配置错误。需修改 model.obstacle_head.reg_branches.0.0 的 qconfig 配置。 2. DequantStub 存在 qint8 输入,说明有几处可能未高精度输出。模板只支持 dequant 前的 GEMM 类算子自动高精度输出,需要排查这些 dequant 前是否为 GEMM 类算子。 3. 除 quant 和 dequant 外,少量算子有 fp32 输入,说明有几处可能缺少 quant 节点。如果编译模型,会发现模型并不是全一段,有部分算子被退回 cpu,可以在每一层的详细输入输出类型中看出是哪个算子,并插入 quantstub。 ## 2.3 混合精度调优 整个流程首先进行全 int16 精度调优,此阶段用于确认模型的精度上限,排查工具使用问题和量化不友好模块。在确认全 int16 精度满足需求后,进行全 int8 精度调优。如果精度不达标则进行 int8 / int16 混合精度调优,在全 int8 的基础上逐步增加 int16 的比例,该阶段需要在精度和性能间做权衡,在满足精度的前提下,找出性能尽可能好的量化配置。 ### 2.3.1 全 INT16 精度调优
有这样一个典型的自动驾驶模型结构,输入分为前视/周视/后视,进行以下操作: 1. 分别使用各自的 backbone 提取特征,neck 做不同 level 的特征融合; 2. 不同视角的特征做空间特征融合; 3. 前后帧特征做时序融合; 4. 不同的 head 基于融合后的特征执行各自的任务; ## 2.2 模型结构和量化配置检查 在对模型做完 QAT 相关的适配和改造后,运行程序,运行目录下会生成 model_check_result.txt。 ### 2.2.1 算子融合检查 首先查看算子融合的情况,发现有少量算子未按照预期融合。 text Fusable modules are listed below: name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.0.0(shared) model.view_transformation._generated_add_0 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.1.0(shared) model.view_transformation._generated_add_2 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.2.0(shared) model.view_transformation._generated_add_4 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.3.0(shared) model.view_transformation._generated_add_6 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.4.0(shared) model.view_transformation._generated_add_8 name type ------------------------------------------------ -------------------------------------------------------------------------- model.view_transformation.input_proj.5.0(shared) model.view_transformation._generated_add_10 查看 model.view_transformation.input_proj 模块。 python class BevFormer(BaseModule): def process_input(self, feats): ... for cam_idx in range(num_cameras): # 这里因动态block的存在,需要使用dynamic_block标注才能正常融合 with Tracer.dynamic_block(self, "bevformer_process_input"): src = cur_fpn_lvl_feat[cam_idx] bs, _, h, w = src.shape spatial_shape = (h, w) spatial_shapes.append(spatial_shape) src = self.input_proj[str(cam_idx)](src) src = src + self.cams_embeds[cam_idx][None, :, None, None] src = src + self.level_embeds[feat_idx][None, :, None, None] src = src.flatten(2).transpose(1, 2) src_flatten.append(src) ### 2.2.2 共享模块检查 called times > 1 的模块需要拆开。 text Each module called times: name called times --------------------------------------------------------------------------------------- -------------- ... model.map_head.sparse_head.decoder.gen_sineembed_for_position.div.reciprocal 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.div.mul 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.sin_model.sin 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.cos_model.cos 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.stack 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.cat 4 model.map_head.sparse_head.decoder.gen_sineembed_for_position.mul 8 model.map_head.sparse_head.decoder.gen_sineembed_for_position.dim_t_quant 4 ... calibration 或 qat 训练后发现精度比较差,使用 debug 工具时可以在逐层比较中观察这些共享算子的统计信息,base_model 为浮点模型,analy_model 为校准模型。以 model.map_head.sparse_head. decoder.gen_sineembed_for_position.div.mul 的其中两次调用为例,量化表示的最大值为 128 * 0.0446799 ≈ 5.719,在第一次使用中,输出范围明显小于 [-5.719, 5.719],误差较小, 第二次使用中,输出范围超出 [-5.719, 5.719],数值被截断,产生了较大误差。两次数值范围的差异也导致统计出的 scale 不准确。 text +------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+--------------------------------+---------------+------------+------------------+-------------------+------------------+-------------------+ | | mod_name | base_op_type | analy_op_type | shape | quant_dtype | qscale | base_model_min | analy_model_min | base_model_max | analy_model_max | |------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+--------------------------------+---------------+------------+------------------+-------------------+------------------+-------------------+ ... | 1227 | model.map_head.sparse_head.decoder.gen_sineembed_for_position.div | horizon_plugin_pytorch.nn.div.Div | horizon_plugin_pytorch.nn.qat.functional_modules.FloatFunctional.mul | torch.Size([1, 1600, 128]) | qint8 | 0.0446799 | 0.0002146 | 0.0000000 | 4.5935526 | 4.5567998 | ... | 1520 | model.map_head.sparse_head.decoder.gen_sineembed_for_position.div | horizon_plugin_pytorch.nn.div.Div | horizon_plugin_pytorch.nn.qat.functional_modules.FloatFunctional.mul | torch.Size([1, 1600, 128]) | qint8 | 0.0446799 | 0.0000000 | 0.0000000 | 6.2831225 | 5.7190272 | ... 查看 model.map_head.sparse_head.decoder.gen_sineembed_for_position 模块。 python class AnchorDeformableTransformerDecoder(nn.Module): def __init__(self, decoder_layer, num_layers, return_intermediate=False): ... # 构造不同的 gen_sineembed_for_position,拆开使用。 for i in range(len(self.layers)): self.add_module( "gen_sineembed_for_position%d" % (i), PositionEmbedding() ) def forward(...): ... for lid, layer in enumerate(self.layers): ref_shape = reference_points.shape assert ref_shape[-1] == 2 reference_points_reshape = reference_points.view(ref_shape[0], -1, 2) query_sine_embed = getattr(self, "gen_sineembed_for_position%d" % (lid))(reference_points_reshape) ... ### 2.2.3 qconfig 正确性检查 text input dtype statistics: +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ | module type | torch.float32 | qint8 | qint16 | qint32 | |----------------------------------------------------------------------------+-----------------+---------+----------+----------| | | 290 | 15 | 0 | 0 | | | 0 | 6 | 0 | 0 | | | 0 | 228 | 0 | 0 | | | 0 | 63 | 0 | 0 | | | 3 | 425 | 725 | 140 | | | 0 | 9 | 0 | 0 | | | 5 | 117 | 9 | 72 | | | 0 | 64 | 125 | 0 | | | 0 | 53 | 0 | 0 | | | 1 | 17 | 0 | 28 | | | 0 | 1 | 0 | 0 | | | 0 | 8 | 0 | 56 | | | 0 | 4 | 0 | 4 | | | 0 | 8 | 0 | 4 | | total | 299 | 1018 | 859 | 304 | +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ output dtype statistics: +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ | module type | torch.float32 | qint8 | qint16 | qint32 | |----------------------------------------------------------------------------+-----------------+---------+----------+----------| | | 0 | 123 | 182 | 0 | | | 0 | 6 | 0 | 0 | | | 0 | 228 | 0 | 0 | | | 0 | 63 | 0 | 0 | | | 0 | 341 | 716 | 64 | | | 0 | 9 | 0 | 0 | | | 0 | 85 | 18 | 100 | | | 0 | 55 | 134 | 0 | | | 0 | 53 | 0 | 0 | | | 0 | 18 | 0 | 28 | | | 0 | 1 | 0 | 0 | | | 0 | 8 | 0 | 56 | | | 0 | 4 | 0 | 0 | | | 12 | 0 | 0 | 0 | | total | 12 | 994 | 1050 | 248 | +----------------------------------------------------------------------------+-----------------+---------+----------+----------+ Each layer out qconfig: +---------------------------------------------------------------------------------------------+----------------------------------------------------------------------------+--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------+-----------------+-------------------+--------------+ | Module Name | Module Type | Input dtype | out dtype | ch_axis | observer | |---------------------------------------------------------------------------------------------+----------------------------------------------------------------------------+--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------+-----------------+-------------------+--------------| ... | model.obstacle_head.reg_branches.0.0 | | ['qint8'] | ['qint32'] | -1 | MixObserver | ... | model.obstacle_head.reg_out_dequant0 | | ['qint8'] | [torch.float32] | qconfig = None | | 存在如下问题: 1. 存在 qint32 输出的算子。高精度输出体现在这里的表格中是 torch.float32,并不是 qint32,应该是 qconfig 配置错误。需修改 model.obstacle_head.reg_branches.0.0 的 qconfig 配置。 2. DequantStub 存在 qint8 输入,说明有几处可能未高精度输出。模板只支持 dequant 前的 GEMM 类算子自动高精度输出,需要排查这些 dequant 前是否为 GEMM 类算子。 3. 除 quant 和 dequant 外,少量算子有 fp32 输入,说明有几处可能缺少 quant 节点。如果编译模型,会发现模型并不是全一段,有部分算子被退回 cpu,可以在每一层的详细输入输出类型中看出是哪个算子,并插入 quantstub。 ## 2.3 混合精度调优 整个流程首先进行全 int16 精度调优,此阶段用于确认模型的精度上限,排查工具使用问题和量化不友好模块。在确认全 int16 精度满足需求后,进行全 int8 精度调优。如果精度不达标则进行 int8 / int16 混合精度调优,在全 int8 的基础上逐步增加 int16 的比例,该阶段需要在精度和性能间做权衡,在满足精度的前提下,找出性能尽可能好的量化配置。 ### 2.3.1 全 INT16 精度调优 | | float | 目标(损失 < 1% | 全 int16 calibration| | - | - | - | - | | 动态 | 73.6 | 72.864 | 0 | | 静态 | 55.5 | 54.945 | 0 |
第一次校准,精度崩溃。正常情况下,全 int16 量化方式不会导致精度崩溃,需要针对造成掉点的输出进行精度 debug,这里静态和动态分支的输出任意取一个做如下改造。这里的示例加上了部分后处理(sigmoid),并且只针对静态分支(map)的最后一层输出做 debug。 ```python class BevNet(pl.LightningModule): def forward(self, batch): ... # return image, calibration, gt_dict, mask_dict, pred_dict # 只针对掉点的输出 debug。针对全部输出 debug 也可以,但没有针对性,速度也会慢一点 return pred_dict['map']['preds']['layer_3'] class MapQRHead(BaseModule): def forward_branch(self, hs, init_reference, inter_references): outputs = [] for lvl in range(hs.shape[0]): ... cls_out = getattr(self, "cls_out_dequant%d" % (lvl))(self.cls_branches[lvl](hs[lvl])) pts_out = getattr(self, "pts_out_dequant%d" % (lvl))(self.pts_branches[lvl](hs[lvl])).view(bs, -1, 2) # 这个属于后处理逻辑,虽然放在 dequant 之后,但精度 debug 也要加上 pts_out = pts_out.sigmoid() pts_out = pts_out.view(bs, self.num_polyline, self.num_pts_per_polyline, -1) y = torch.cat([cls_out, pts_out, attr_out[0], attr_out[1], attr_out[2], attr_out[3], attr_out[4]], dim=-1) # bs,num_polyline,num_pts,n_attr outputs.append(y) return outputs ``` 得到的 debug 结果如下: ```text op_name sensitive_type op_type L1 --------------------------------------------------------------------------------------- ---------------- -------------------------------------------------------------------------- ---------- model.view_transformation.transformer.layers.0.quant activation 0.580483 model.obstacle_head.decoder.layers.0.cross_attn.quant_normalizer activation 0.130977 ... ``` 从量化敏感度看,排前面的主要是几个 quantstub。在逐层比较中分析这几个敏感算子的量化误差是哪种误差。 ```text +------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+--------------------------------+---------------+------------+------------+--------------+------------+------------+-------------+-------------+-------------------------------------------------+------------------+-------------------+------------------+-------------------+-------------------+--------------------+------------------+-------------------+-----------------+-------------------+ | | mod_name | base_op_type | analy_op_type | shape | quant_dtype | qscale | Cosine | MSE | L1 | KL | SQNR | Atol | Rtol | base_model_min | analy_model_min | base_model_max | analy_model_max | base_model_mean | analy_model_mean | base_model_var | analy_model_var | max_atol_diff | max_qscale_diff | |------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+--------------------------------+---------------+------------+------------+--------------+------------+------------+-------------+-------------+-------------------------------------------------+------------------+-------------------+------------------+-------------------+-------------------+--------------------+------------------+-------------------+-----------------+-------------------| ... | 791 | model.view_transformation.transformer.layers.0.quant | horizon_plugin_pytorch.quantization.stubs.QuantStub | horizon_plugin_pytorch.nn.qat.stubs.QuantStub | torch.Size([1, 1875, 24, 2]) | qint8 | 0.7764707 | 0.9999968 | 0.1134158 | 0.3205845 | 0.0000081 | 46.6785774 | 0.3882294 | 1.0000000 | -99.0000000 | -98.6117706 | 0.9999269 | 0.7764707 | -53.0977783 | -52.8312225 | 2459.8188477 | 2446.8227539 | 0.3882294 | 0.4999923 | ... | 883 | model.obstacle_head.decoder.layers.0.cross_attn.quant_normalizer | horizon_plugin_pytorch.quantization.stubs.QuantStub | horizon_plugin_pytorch.nn.qat.stubs.QuantStub | torch.Size([1, 7500, 8, 32]) | qint8 | 0.0522360 | 0.3601017 | 0.9630868 | 0.6762735 | 0.0000729 | -0.6995326 | 12.4819937 | 601413.5625000 | -9.2183294 | -6.5295014 | 10.2716885 | 6.6339736 | -0.0177280 | -0.0255637 | 0.8194664 | 0.6810485 | 12.4819937 | 238.9537970 | ... ``` 对于 model.view_transformation.transformer.layers.0.quant: 1. 量化类型仍然为 qint8,说明 int16 的配置未生效,需要排查除 setter 以外,是否手动设置了 int8 qconfig. 2. scale 是 0.7764707, 能表示的浮点范围为 0.776 * (-128) = -99.38 到 0.776 * 127 = 98.61。结合这里的物理含义,此 quant 的输入范围应该是 -100 到 1, 所以会产生少量的截断误差。同时,此数值范围较大,对于 int8 来说,也会产生较大的舍入误差。所以需要改为 int16 量化并按输入范围设置固定 scale 为 100 / 32768。 对于 model.obstacle_head.decoder.layers.0.cross_attn.quant_normalizer,也一样是类似的问题。 修改完成后,重新跑校准和精度 debug,可以观察到精度明显提升,之前敏感度排序靠前的几个算子,敏感度也有明显下降。之后,我们进行 qat 训练。
| | float | 目标(损失 < 1% | 全 int16 calibration| | - | - | - | - | | 动态 | 73.6 | 72.864 | 73.4 | | 静态 | 55.5 | 54.945 | 54 |
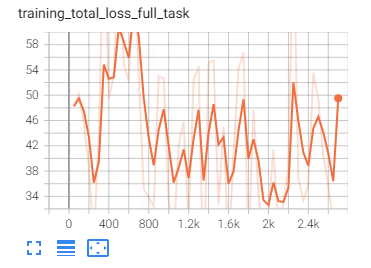
初次 QAT 训练,发现精度崩溃,loss 曲线不收敛。
| | float | 目标(损失 < 1%) | 全 int16 calibration | 全 int16 qat | finetune float | |:-----:|:-----:|:-----:|:-----:|:-----:|:-----:| | 动态 | 73.6 | 72.864 | 73.4 | 0 | 0 | | 静态 | 55.5 | 54.945 | 54 | 0 | 0 |
 做以下尝试: 1. 因为校准指标差的不多,所以认为模型中已不包含量化工具使用问题,首先想到的是调整 lr,weight decay 等许多方法,仍然无法解决这个问题。 2. 精度 debug。发现 model.map_head.sparse_head.decoder.gen_sineembed_for_position0.dim_t_quant 在 int16 量化的情况下,敏感度排名靠前,仍然误差较大。 ```text op_name sensitive_type op_type L1 quant_dtype ----------------------------------------------------------------------------- ---------------- -------------------------------------------------------------------------- ---------- ------------- model.map_head.sparse_head.decoder.gen_sineembed_for_position0.dim_t_quant activation 0.82213 qint16 model.map_head.sparse_head.decoder.gen_sineembed_for_position1.dim_t_quant activation 0.184159 qint16 model.map_head.sparse_head.pts_branches.0.6 activation 0.131423 qint16 model.map_head.sparse_head.decoder.gen_sineembed_for_position2.dim_t_quant activation 0.111852 qint16 model.map_head.sparse_head.pts_branches.1.6 activation 0.0930651 qint16 model.map_head.sparse_head.sigmoid activation 0.0887103 qint16 model.map_head.sparse_head.pts_branches.2.6 activation 0.0728263 qint16 model.map_head.sparse_head.reference_points.2 activation 0.0689369 qint16 ``` 查看逐层比较,量化范围为 32767 * 0.2642754 ≈ 8659.51,虽然数值比较大,但没有明显的截断误差. ```text +------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+----------------------------------+---------------+------------+------------+-------------+-----------+------------+-------------+-------------+-------------------------------------------------+------------------+-------------------+------------------+-------------------+-------------------+--------------------+------------------+-------------------+-----------------+-------------------+ | | mod_name | base_op_type | analy_op_type | shape | quant_dtype | qscale | Cosine | MSE | L1 | KL | SQNR | Atol | Rtol | base_model_min | analy_model_min | base_model_max | analy_model_max | base_model_mean | analy_model_mean | base_model_var | analy_model_var | max_atol_diff | max_qscale_diff | |------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+----------------------------------+---------------+------------+------------+-------------+-----------+------------+-------------+-------------+-------------------------------------------------+------------------+-------------------+------------------+-------------------+-------------------+--------------------+------------------+-------------------+-----------------+-------------------| ... | 1296 | model.map_head.sparse_head.decoder.gen_sineembed_for_position0.dim_t_quant | torch.ao.quantization.stubs.QuantStub | horizon_plugin_pytorch.nn.qat.stubs.QuantStub | torch.Size([128]) | qint16 | 0.2642754 | 0.9999999 | 0.0058058 | 0.0670551 | 0.0000000 | 89.0683746 | 0.1328125 | 0.0845878 | 1.0000000 | 1.0571015 | 8659.6435547 | 8659.5107422 | 1009.3834229 | 1009.3997803 | 3694867.5000000 | 3694819.5000000 | 0.1328125 | 0.5025535 | ... ``` 打印 dim_t,发现是非均匀分布,对线性量化不友好,在数值较小时会产生较大误差。
做以下尝试: 1. 因为校准指标差的不多,所以认为模型中已不包含量化工具使用问题,首先想到的是调整 lr,weight decay 等许多方法,仍然无法解决这个问题。 2. 精度 debug。发现 model.map_head.sparse_head.decoder.gen_sineembed_for_position0.dim_t_quant 在 int16 量化的情况下,敏感度排名靠前,仍然误差较大。 ```text op_name sensitive_type op_type L1 quant_dtype ----------------------------------------------------------------------------- ---------------- -------------------------------------------------------------------------- ---------- ------------- model.map_head.sparse_head.decoder.gen_sineembed_for_position0.dim_t_quant activation 0.82213 qint16 model.map_head.sparse_head.decoder.gen_sineembed_for_position1.dim_t_quant activation 0.184159 qint16 model.map_head.sparse_head.pts_branches.0.6 activation 0.131423 qint16 model.map_head.sparse_head.decoder.gen_sineembed_for_position2.dim_t_quant activation 0.111852 qint16 model.map_head.sparse_head.pts_branches.1.6 activation 0.0930651 qint16 model.map_head.sparse_head.sigmoid activation 0.0887103 qint16 model.map_head.sparse_head.pts_branches.2.6 activation 0.0728263 qint16 model.map_head.sparse_head.reference_points.2 activation 0.0689369 qint16 ``` 查看逐层比较,量化范围为 32767 * 0.2642754 ≈ 8659.51,虽然数值比较大,但没有明显的截断误差. ```text +------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+----------------------------------+---------------+------------+------------+-------------+-----------+------------+-------------+-------------+-------------------------------------------------+------------------+-------------------+------------------+-------------------+-------------------+--------------------+------------------+-------------------+-----------------+-------------------+ | | mod_name | base_op_type | analy_op_type | shape | quant_dtype | qscale | Cosine | MSE | L1 | KL | SQNR | Atol | Rtol | base_model_min | analy_model_min | base_model_max | analy_model_max | base_model_mean | analy_model_mean | base_model_var | analy_model_var | max_atol_diff | max_qscale_diff | |------+-------------------------------------------------------------------------------+-----------------------------------------------------------------------------------+-----------------------------------------------------------------------------+----------------------------------+---------------+------------+------------+-------------+-----------+------------+-------------+-------------+-------------------------------------------------+------------------+-------------------+------------------+-------------------+-------------------+--------------------+------------------+-------------------+-----------------+-------------------| ... | 1296 | model.map_head.sparse_head.decoder.gen_sineembed_for_position0.dim_t_quant | torch.ao.quantization.stubs.QuantStub | horizon_plugin_pytorch.nn.qat.stubs.QuantStub | torch.Size([128]) | qint16 | 0.2642754 | 0.9999999 | 0.0058058 | 0.0670551 | 0.0000000 | 89.0683746 | 0.1328125 | 0.0845878 | 1.0000000 | 1.0571015 | 8659.6435547 | 8659.5107422 | 1009.3834229 | 1009.3997803 | 3694867.5000000 | 3694819.5000000 | 0.1328125 | 0.5025535 | ... ``` 打印 dim_t,发现是非均匀分布,对线性量化不友好,在数值较小时会产生较大误差。 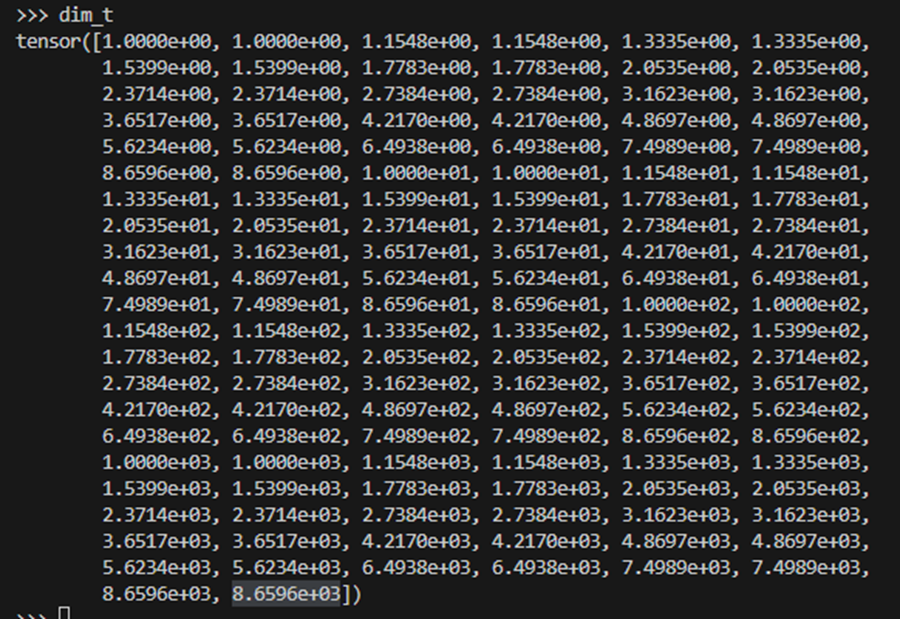 dim_t 是一个除法分母,当 dim_t 较小时,舍入误差会被除法放大。因为 dim_t 是固定的,而且知道前几个小数值的舍入误差影响较大,我们只要将他分成两组量化,在 div 之后再 cat 起来就行,这样就能保证第一组 scale 变小,减小舍入误差。 ```python class PositionEmbedding(torch.nn.Module): def forward(self, pos_tensor): dim_t = torch.arange(128, dtype=torch.float32, device=pos_tensor.device) dim_t = 10000 ** (2 * (dim_t // 2) / 128) # dim_t = self.dim_t_quant(dim_t) # pos_x = x_embed[:, :, None] / dim_t dim_t_1 = dim_t[:32] # 如果调整得更细,32 也可以调大或调小。 dim_t_2 = dim_t[32:] pos_x_1 = x_embed_1[:, :, None] / dim_t_1 pos_x_2 = x_embed_2[:, :, None] / dim_t_2 pos_x = torch.cat([pos_x_1, pos_x_2]) ``` 此时,再看全 int16 校准和 qat 精度,校准精度有一定提升, qat 精度仍然崩溃。
dim_t 是一个除法分母,当 dim_t 较小时,舍入误差会被除法放大。因为 dim_t 是固定的,而且知道前几个小数值的舍入误差影响较大,我们只要将他分成两组量化,在 div 之后再 cat 起来就行,这样就能保证第一组 scale 变小,减小舍入误差。 ```python class PositionEmbedding(torch.nn.Module): def forward(self, pos_tensor): dim_t = torch.arange(128, dtype=torch.float32, device=pos_tensor.device) dim_t = 10000 ** (2 * (dim_t // 2) / 128) # dim_t = self.dim_t_quant(dim_t) # pos_x = x_embed[:, :, None] / dim_t dim_t_1 = dim_t[:32] # 如果调整得更细,32 也可以调大或调小。 dim_t_2 = dim_t[32:] pos_x_1 = x_embed_1[:, :, None] / dim_t_1 pos_x_2 = x_embed_2[:, :, None] / dim_t_2 pos_x = torch.cat([pos_x_1, pos_x_2]) ``` 此时,再看全 int16 校准和 qat 精度,校准精度有一定提升, qat 精度仍然崩溃。| | float | 目标(损失 < 1%) | 全 int16 calibration | 全 int16 qat | finetune float | |:-----:|:-----:|:-----:|:-----:|:-----:|:-----:| | 动态 | 73.6 | 72.864 | 73.4 | 0 | 0 | | 静态 | 55.5 | 54.945 | 54.7 | 0 | 0 |
开始排查训练 pipeline 的问题: 1. 使用 qat 流程和训练参数 finetune 浮点模型,并与浮点训练对比,发现 loss 仍然偏大,精度仍然崩溃。 2. 将 lr 设置为 0,finetune 仍然精度崩溃,于是定位到问题与 qat 无关,是 qat 训练所使用的代码未与浮点代码对齐。 仔细对比修改记录,解决浮点模型的对齐问题后,再重新进行全 int16 模型的校准和 qat,精度达标。
| | float | 目标(损失 < 1%) | 全 int16 calibration | 全 int16 qat | |:-----:|:-----:|:-----:|:-----:|:-----:| | 动态 | 73.6 | 72.864 | 73.4 | 74.1 | | 静态 | 55.5 | 54.945 | 54.7 | 55.3 |
### 2.3.2 全 INT8 精度调优 因为我们在全 int16 debug 中已经发现有一些比较敏感的算子,在全 int8 调优中可以将这些算子直接设置为 int16(也可以假设没发现保持 int8,在 int8 精度 debug 中也是可以找出来的),其余算子设置为 int8。在这样的量化配置下,校准和 qat 精度都崩溃。
| | float | 目标(损失 < 1%) | 全 int16 calibration | 全 int16 qat | 全 int8 calibration | 全 int8 qat | |:-----:|:-----:|:-----:|:-----:|:-----:|:-----:|:-----:| | 动态 | 73.6 | 72.864 | 73.4 | 74.1 | 0 | 0 | | 静态 | 55.5 | 54.945 | 54.7 | 55.3 | 0 | 0 |
需要使用 debug 工具分析后增加 int16 算子。 ### 2.3.3 INT8 / INT16 混合精度调优 按照全 int8 debug 的结果,将前几个敏感度断层式领先的算子设置为 int16。 ```text op_name sensitive_type op_type L1 quant_dtype --------------------------------------------------------------------------------------- ---------------- -------------------------------------------------------------------------- --------- ------------- model.view_transformation.ref_point_quant activation 1.79371 qint8 model.map_head.sparse_head.decoder.gen_sineembed_for_position0.dim_t_quant activation 1.46594 qint8 model.map_head.sparse_head.decoder.reg_branch_output_add0 activation 0.352401 qint8 model.map_head.sparse_head.decoder.gen_sineembed_for_position1.dim_t_quant activation 0.246953 qint8 model.view_transformation.transformer.layers.0.linear2 activation 0.22353 qint8 model.map_head.sparse_head.decoder.gen_sineembed_for_position2.dim_t_quant activation 0.214513 qint8 model.map_head.sparse_head.decoder.reg_branch_output_add1 activation 0.185211 qint8 model.map_head.sparse_head.sigmoid activation 0.1826 qint8 model.map_head.sparse_head.decoder.gen_sineembed_for_position3.dim_t_quant activation 0.166937 qint8 ``` 最终,使用敏感度 top 0.5% 的算子 int16 ,精度达标。接下来,还可以再精调学习率,weight decay 等参数,在使用更少的 int16 的情况下使得 qat 精度达标。
| | float | 目标(损失 < 1%) | 全 int8 calibration | 全 int8 qat | int8 + ref_point_quant int16 calibration | int8 + ref_point_quant int16 qat | int8 + 敏感度 top 0.5% int16 calibration | int8 + 敏感度 top 0.5% int16 qat | |:-----:|:-----:|:-----:|:-----:|:-----:|:-----:|:-----:|:-----:|:-----:| | 动态 | 73.6 | 72.864 | 0 | 0 | 70.9 | 71.3 | 71 | 73.1 | | 静态 | 55.5 | 54.945 | 0 | 0 | 7.5 | 27.8 | 53.7 | 55.1 |
'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)