
问题
现在无图/轻地图的智驾方案比较火,主要就是因为依靠高精地图来为感知兜底的方式成本太高,那么为什么现在大家都齐刷刷地转向bev/occ+transformer的方案呢?这种方案相比于用SLAM方法实时建立一定时间范围内的局部语义地图,再在此地图上做规划的方案优势在哪儿?以SLAM为基础做局部导航的缺陷在哪儿?
风吹青年心的回答
一般SLAM算法的使用方法分为两步,先建图,后定位。在机器人应用中,这里第一步建好的地图 主要有两个作用,一个作用是用来进行全局的路径规划,另外一个作用是进行第二步的定位。
在自动驾驶场景中道路环境经常变化,高精地图的维护成本较高,因此自驾采用了重感知轻地图的方案,其中轻地图并不是无地图,自驾中全局的路径规划问题可以依靠百度地图等来进行,定位问题可以使用轮速计、IMU、卫星导航组合的方式来替代。然后在这种定位方法的基础上进行局部语义地图的创建。
而题主说的为啥不采用SLAM的方式进行局部语义地图的创建,我的理解是自驾中还是使用了SLAM中帧间位姿估计的方法,只不过没有采用基于先验地图的SLAM定位方法而已,所以这种多传感器组合定位的方法只是没有被叫做SLAM定位而已。
此外,虽然自驾中大多采用轻地图重感知的方案,但是室内机器人像是扫地机器人、人形机器人、仓运机器人等等还是采用的SLAM+局部语义地图的方法,因为室内机器人要求更高的精度,而且GPS等传感器在室内也无法使用,所以目前来说SLAM+感知的方案对于室内机器人来说还是主流。
最后,其实我感觉容易让题主产生疑惑的点更多的在于名称的叫法上面,只不过搞深度学习的人把定位+局部语义地图这一块工作叫做感知任务而已,其实跟SLAM+局部语义地图的叫法区别不大,局部语义地图的创建方法可以是一样的,区别只在于定位上面而已。
本人没有从事过自驾行业,所以也不保证说的是否完全正确,如果有不同理解,大家可以评论指正。
小方同学的回答
这个问题很好,借此澄清几个概念:
1 无“图”智驾,也需要有图,无“图”其实是偷换概念,因为商业和监管的原因。
3 无图方案,都会使用SLAM技术建图。SLAM技术是一个建图和定位的技术的打包集合。不管有图无图,都会使用SLAM技术做融合定位或者叫定位配准。所以,这个提问,连续犯了三个逻辑错误。
5 关于最后一问,大家都会“以SLAM为基础做局部导航”,这句话等同于“以定位技术为基础做定位”。

Joanna的回答
首先第一“无图”并不是没有高精地图,是不要外部提供的高精地图,内部是需要自建图;
第二:SLAM建图可以作为无图智驾一种方式,叫记忆行车,业内也有就是大疆,小鹏的通勤模式,这种模式是可以只用导航地图,但是SLAM一次并不能得到全部道路元素与结构,需要跑重复的道路几次,所以智驾系统会表现出一回生二回熟,一次比一次开的好,但这也就意味着它需要你跑同样的路线,SLAM建图是能适用于你经常上下班或者同一路线的通勤模式;
第三:bev/occ + transformer 不是一个方案,SLAM也是可以使用bev生成的道路拓扑自建地图的,另外有SLAM也并不意味着不需要occ,occ对于没有激光雷达方案,道路异形障碍物检测是必须的;
第四个:一定时间范围内的局部语义地图,如果简单依赖视觉bev+occ,是没有超视距信息的,也能用,但是你要接受它可能变道到汇入车道以及在遮挡时出现一些意想不到的问题,这种模式上限也就是有图;
Frank Dellaert的回答
首先就是高速场景,基于高精地图建立的先验地图信息更新比较慢,图商的地图车造价很高,都是季度更新的,最多是按照月去更新,所以如果在他们建图歪了一些的话,进行SLAM匹配时结果就会歪,因此这个技术路线就不是很成功的。

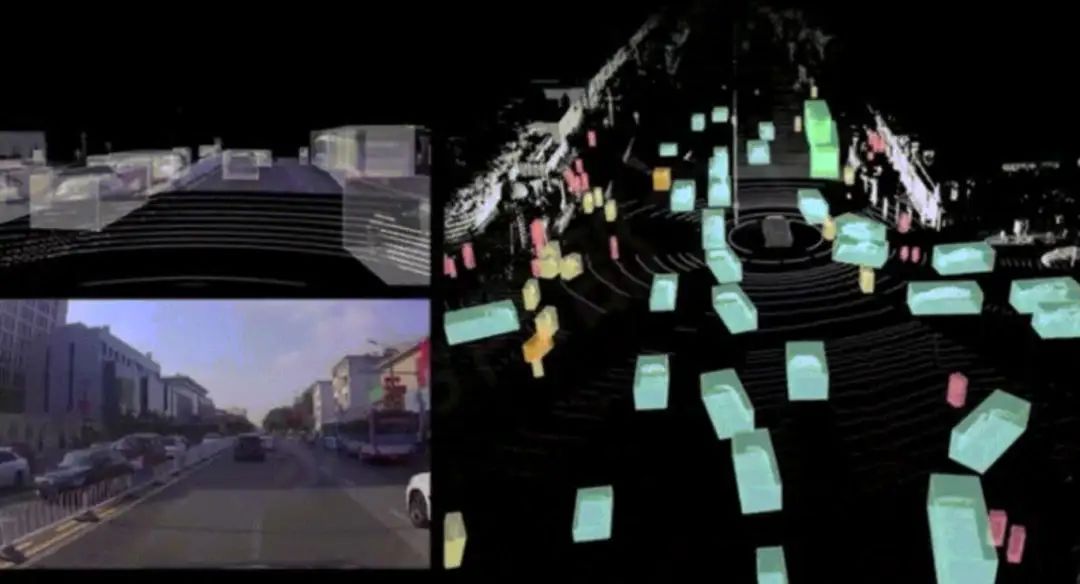
BEV可以实时感知周围前后20m甚至更远的距离,足够规划去使用。所以SLAM的领地在不断的式微,所以我做这个方向最近在有个交待以后也尝试准备转一下.
文章转载自公众号:焉知汽车
原文链接:https://mp.weixin.qq.com/s/yj0RDKTFHh8n6sW1Tn8D7A


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)