
前言
我们知道,大模型现在很火爆,尤其是 deepseek 风靡全球后,大模型毫无疑问成为为中国新质生产力的代表。百度创始人李彦宏也说:“2025 年可能会成为 AI 智能体爆发的元年”。
随着科技的飞速发展,大模型的影响力日益凸显。它不仅在数据处理和分析方面展现出了强大的能力,还为各个领域带来了前所未有的创新机遇。在众多应用场景中,智能驾驶无疑是备受瞩目的一个领域。
智能驾驶作为未来交通的重要发展方向,具有巨大的潜力和市场需求。大模型的出现,为智能驾驶的发展注入了强大的动力。它可以通过对大量驾驶数据的学习和分析,实现更加精准的环境感知、路径规划和决策控制。例如,大模型可以实时识别道路上的障碍物、交通标志和其他车辆,预测潜在的危险情况,并及时做出相应的驾驶决策,从而提高驾驶的安全性和舒适性。
在这样的一种大趋势下,笔者将针对智能驾驶场景,讲一讲大模型的应用前景以及存在的瓶颈!!!
自动驾驶中的大模型
感知层(Perception)
计算机视觉模型
Tesla Vision(特斯拉)
Tesla Vision 具有以下核心特点:
- 纯视觉(Camera-only)感知:自 2021 年起,特斯拉宣布移除毫米波雷达,完全依靠摄像头。8个摄像头覆盖 360° 视角,包括前、后、侧方摄像头。
- 基于 Transformer 的端到端 AI:Tesla Vision 早期使用**卷积神经网络(CNN)**进行目标检测、分割和轨迹预测。 FSD V12 采用 端到端 Transformer 模型,用 BEV(Bird's Eye View)+ 视频 Transformer 进行感知。利用神经网络自动标注驾驶数据,大规模训练 AI 驾驶模型。BEVFormer / Occupancy Network将 2D 视觉数据转化为 3D 环境模型,提高自动驾驶感知能力。
- 端到端学习(End-to-End Learning):早期 FSD 采用模块化架构(Perception → Planning → Control),FSD V12 采用端到端神经网络,直接学习驾驶行为,无需手工编写规则。
Tesla Vision 的工作原理:
- 感知(Perception):通过 8 个摄像头输入视频流。采用 Transformer 处理时序数据,形成 BEV(俯视图)Occupancy Network 预测周围动态环境(车辆、行人、红绿灯等)。
- 规划(Planning):FSD V12 直接通过 Transformer 计算驾驶路径,无需手工编码。AI 学习人类驾驶行为,进行转向、加速、刹车等决策。
- 控制(Control):车辆根据 AI 计算的轨迹执行驾驶动作。特斯拉自研 AI 芯片 Dojo 提供超大规模计算能力。
多模态大模型
在自动驾驶领域,多模态大模型(Multimodal Large Models, MML)能够融合多个传感器数据(如摄像头、激光雷达、毫米波雷达、IMU 等)来提升感知、决策和控制能力。以下是当前主流的多模态大模型:
BEVFusion
虽然 BEVFusion 不是超大参数模型,但它具备大模型的一些核心特征:
- 多模态(Multimodal)融合:融合 RGB 视觉 + LiDAR + Radar,类似 GPT-4V(图像+文本)这种多模态 AI 方向。
- Transformer 结构:新一代 BEVFusion 开始采用 BEVFormer(Transformer 结构),可扩展成更大规模的计算模型。
- 大规模数据驱动:需要超大规模的数据集(如 Waymo Open Dataset、Tesla 数据库)进行训练,符合大模型训练模式。
Segment Anything Model (SAM)(Meta)+ DINO(自监督学习)
SAM 是由 Meta AI发布的一种通用图像分割模型,可以对任何图像中的任何物体进行分割,而无需特定的数据集进行微调。DINO(基于 Vision Transformer 的自监督学习方法) 由 Facebook AI(现 Meta AI)提出,能够在无监督情况下学习图像表示,广泛用于物体检测、跟踪和语义分割。SAM 和 DINO 结合后,可以极大提升自动驾驶中的 感知精度、泛化能力和数据效率。其结合方式可以总结为:
DINO 作为自监督学习特征提取器,提供高质量的视觉表示。
SAM 作为通用分割工具,利用 DINO 提供的特征进行高精度分割。
结合 BEVFusion、Occupancy Network,增强 3D 语义感知。
其在自动驾驶中的应用可以是:
- 无监督 3D 语义分割:DINO 预训练提取高质量视觉特征,SAM 进行目标分割,提高语义理解能力。
- BEV 视角感知(鸟瞰图增强):DINO 适应跨尺度检测,SAM 用于 BEV 视角的动态目标分割。
- 动态物体跟踪:结合 SAM 的强大分割能力,可更精准跟踪行人、骑行者等。
规划与决策(Decision-making & Planning)
这一层面涉及强化学习、端到端 Transformer 以及大语言模型(LLM)用于自动驾驶策略决策
强化学习与决策模型
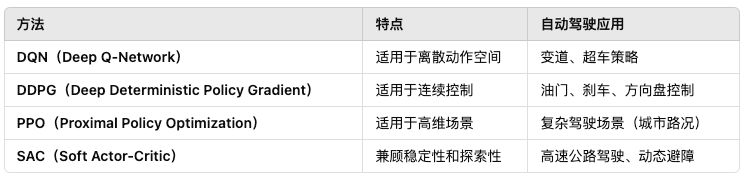
其应用实例有:
- Waymo & Tesla:采用 DDPG/PPO 进行端到端驾驶策略优化。
- Uber ATG:使用 DQN 进行交通信号识别和决策。
端到端 Transformer
Vision Transformer (ViT) + GPT
GriT(Grid Transformer)
- 采用 栅格(Grid-based)方法 进行端到端轨迹预测。
- 适用于 动态环境,如城市道路、高速公路、交叉路口等。
- 结合 Transformer 结构进行全局路径优化,避免局部最优问题。
GriT 主要结构为:
摄像头(前视 & 侧视)、LiDAR 点云(可选)、HD 地图信息。
目标检测(行人、车辆、红绿灯)。
车辆当前状态(速度、加速度、方向等)。
- 采用 栅格化(Grid-based Representation),将环境信息编码为网格结构。
- 使用 Self-Attention 计算,学习全局路径规划策略。
通过 Transformer 计算最优驾驶轨迹。
适应不同交通状况(红绿灯、变道、避障等)。
GriT 在自动驾驶中的应用
GriT 能够预测多个可能路径,并选择最优轨迹,避免碰撞。
- 在高速公路、城市驾驶场景下,实时避让前方障碍物或慢速车辆。
传统路径规划方法(如 A*、Dijkstra)易陷入局部最优,而 GriT 通过 Transformer 提高全局规划能力。
发展趋势
结合更多传感器数据(如雷达)提升安全性。
提高自监督学习能力,减少数据标注需求。
未来 GriT 可能与 BEV 结合,提高 3D 规划能力。
提高对动态环境的适应性,优化驾驶策略。
未来可训练多车辆协同驾驶,提高车队自动驾驶能力。
结合 RL(强化学习)优化自动驾驶策略。
控制层(Control)
- DeepMind MuZero:无模型强化学习框架,可用于动态驾驶控制优化。
- Nvidia Drive Orin / Thor:专用 AI 芯片结合 Transformer 网络,用于高精度自动驾驶控制。
端到端自动驾驶大模型
部分大模型实现了从感知到控制的端到端学习:
- OpenPilot(Comma.ai):开源自动驾驶系统,基于 Transformer 训练的行为克隆模型。
- DriveGPT(类似 AutoGPT 的自动驾驶 LLM):将 LLM 应用于驾驶策略。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)