
1.功能概述¶
本文档为J6X(Journey 6X)系列soc芯片平台与外部GPS设备通信的使用案例,可通过UART协议获取GPS原始数据,用户可以选择
将其在终端中显示或存储至文件中或用于车辆定位。
1.1. 架构说明¶
GPS sample架构图如下:
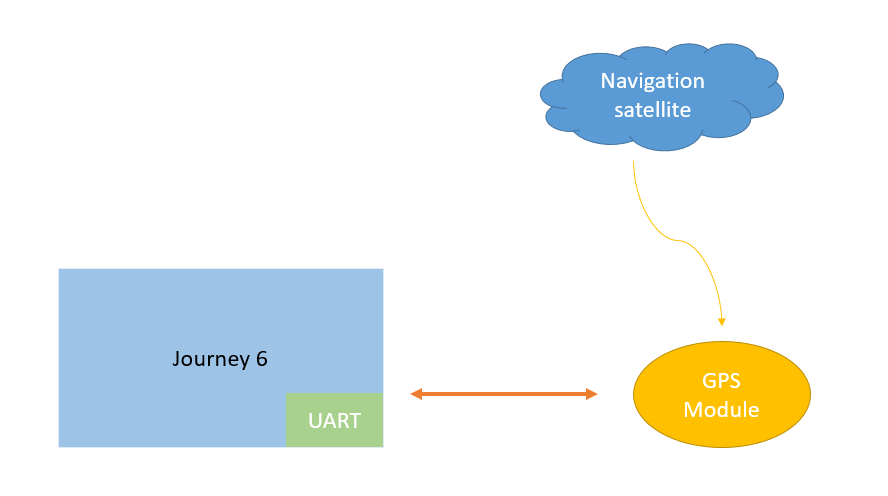
GPS模块作为导航系统的核心组件,负责精准捕获卫星传输的微弱信号,从中提取出关键的定位数据,这些数据经过模块内部的复杂
算法处理,转化为可被导航设备理解和利用的坐标信息,J6X(Journey 6X)芯片则扮演着数据处理与应用的关键角色。它接收来自
GPS模块的定位数据,利用高性能的计算能力进行快速解析和计算。
1.2. 覆盖范围¶
本文档适用范围为J6X(Journey 6X)系列SOC芯片平台。
1.3. 功能介绍¶
支持配置GPS各项功能和从GPS获取原始数据,具体的功能项如下:
通过UART接口建立与M21设备的连接,进行初始化设置,确保通信正常
配置波特率、数据位、停止位和校验位等参数,确保双方通信协议一致
发送特定配置命令给M21,配置M21特定功能,如帧率、数据频率等定位相关信息
可以通过串口终端、图形界面或其他方式展示或是使用GPS数据
根据M21的数据协议,解析程序,提取出经度、纬度、时间等信息用于上层应用
1.4. 平台支持¶
J6X Matrix
Linux OS
SOC与Gps模块的通信,使用标准UART通信协议
2. 编译¶
请根据编译章节进行常规编译,无需额外执行任何操作。
2.1. 相关设备接入¶
SOC平台串口连接PC,并且PC能够通过串口访问SOC平台。
SOC平台网口连接PC,并且PC能够通过网络访问SOC平台。
2.2. 环境搭建步骤¶
Step1: 确认SOC平台和其他芯片平台(如MCU)软件版本,并更新软件版本至当前发版的最新版本。
Step2: 升级SOC的全量包,确保/app分区被升级。
Step3: 通过网络或者串口访问SOC平台,并在SOC平台打开shell终端。
2.3. 可运行程序使用方法¶
GPS默认接到ttyS1上,且默认波特率为38400,修改ttyS1与GPS波特率匹配。
3. 运行¶
3.1. 确认运行成功与否说明¶
3.2. 程序输出结果的说明¶
如果有正确GPS数据打印则通信正常,否则请检查以下事项:
GPS是否正常供电
GPS RESET PIN是否被正确拉高
GPS 是否被配置过,波特率已非默认38400,可以先通过stty命令修改ttyS1波特率为9600、921600等常用波特率
然后再通过cat命令进行查看,是否有正确数据输出
'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)