

当时也邀请了数位激光雷达专家,对SPAD-SoC技术进行了精彩分享(包含视频和讲义下载,链接见文末):


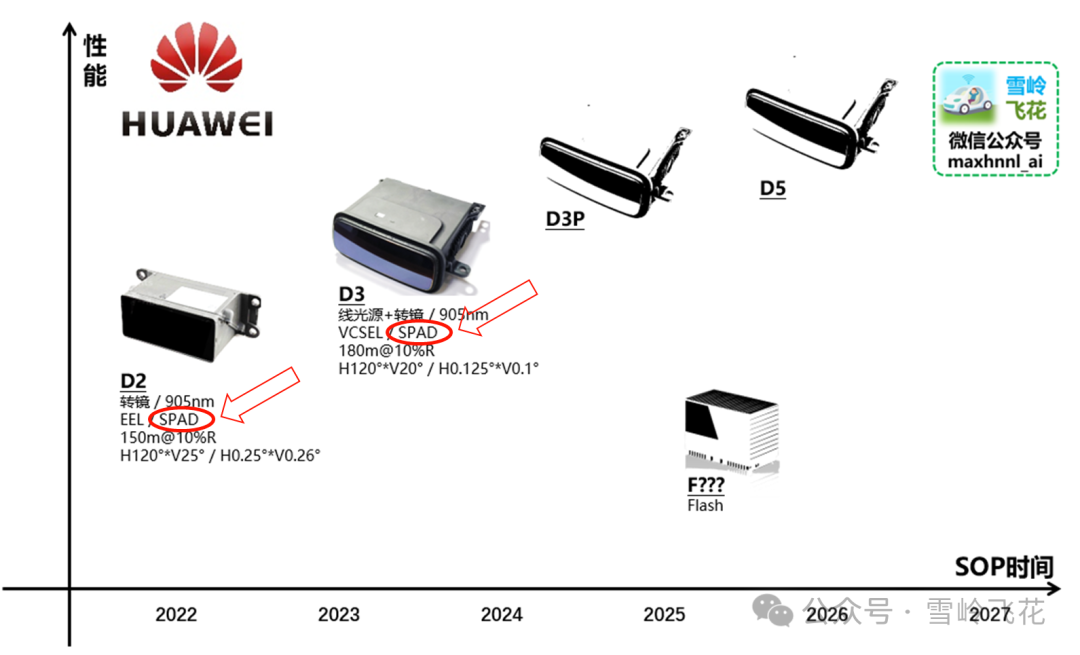
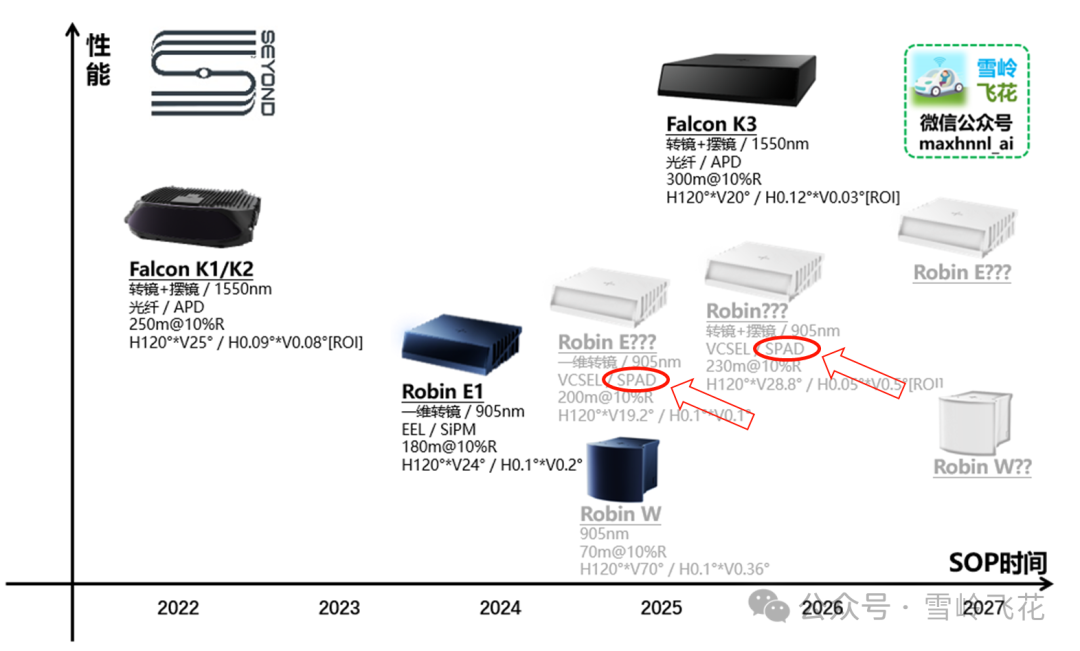
今年以来,SPAD-SoC热度在不断提升,包括速腾、禾赛、华为等多个头部玩家都在加大SPAD-SoC方向的布局。
01
SiPM和SPADs原理简介
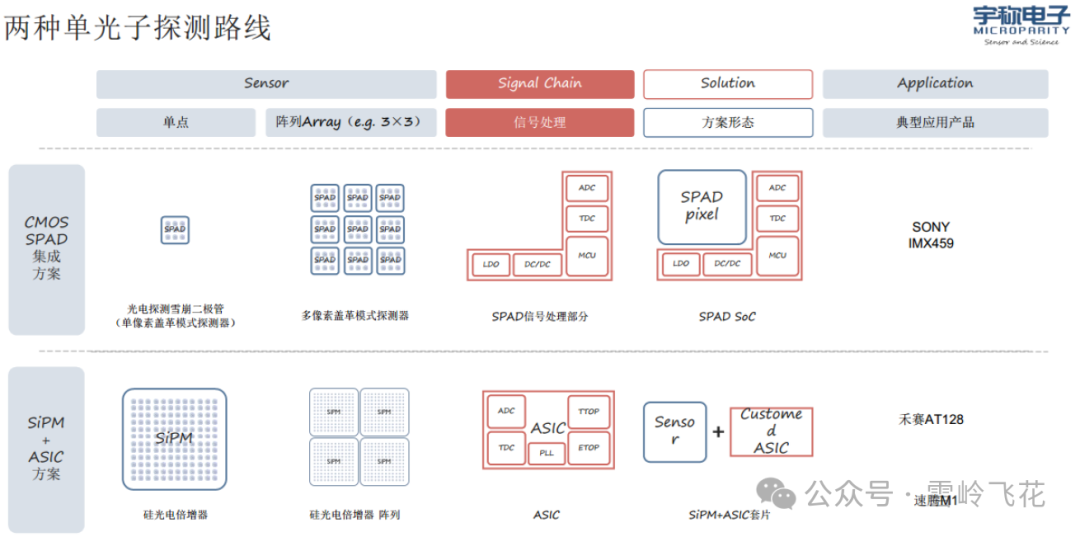
1. 分类
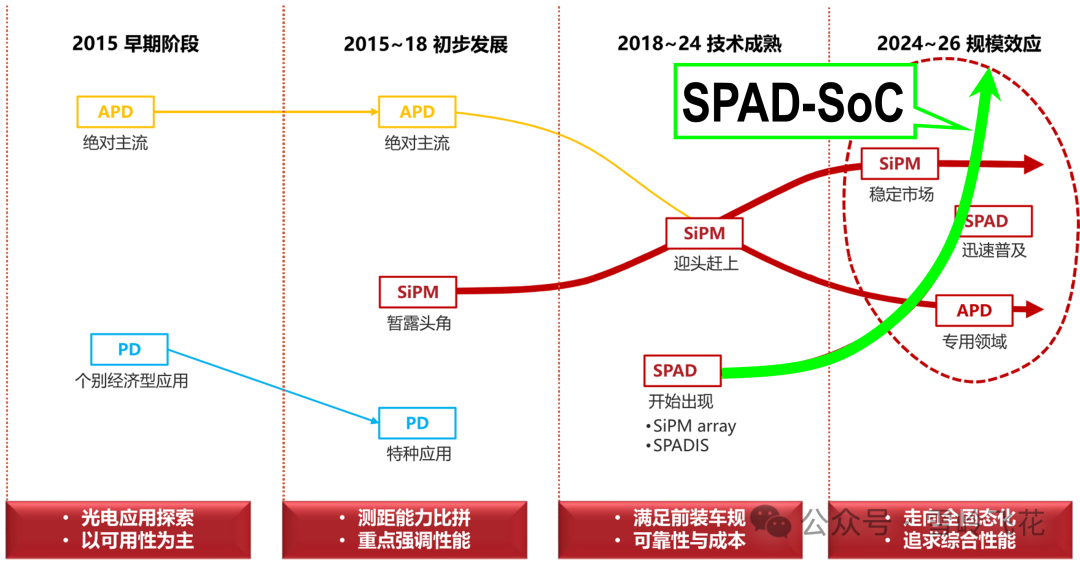
其中,APD主要用于1550nm激光雷达,SiPM和SPADs主要用于905/940nm激光雷达。如下是不同接收单元的分类:
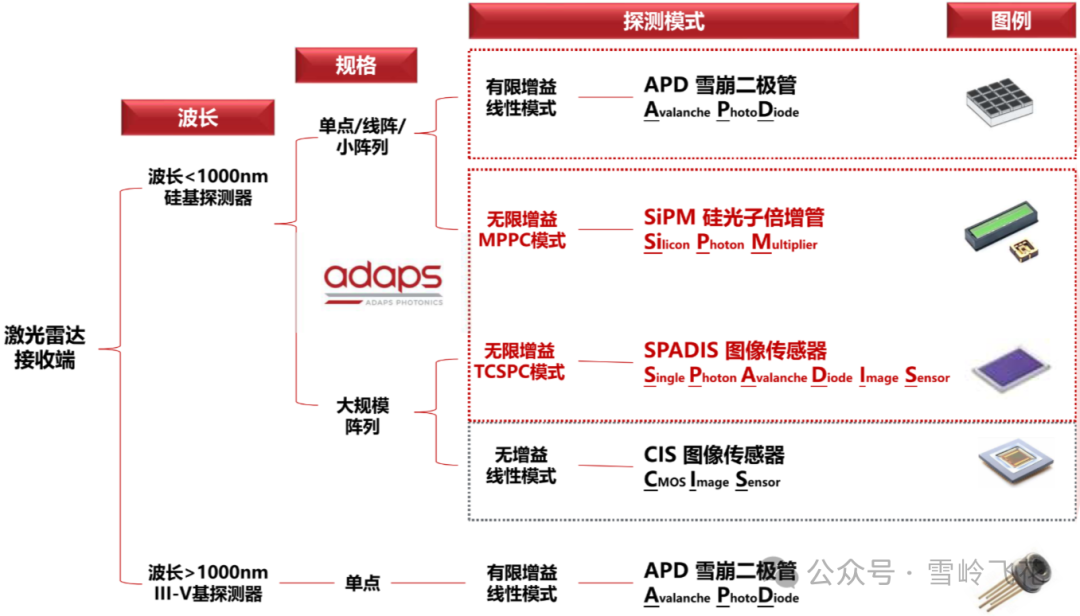
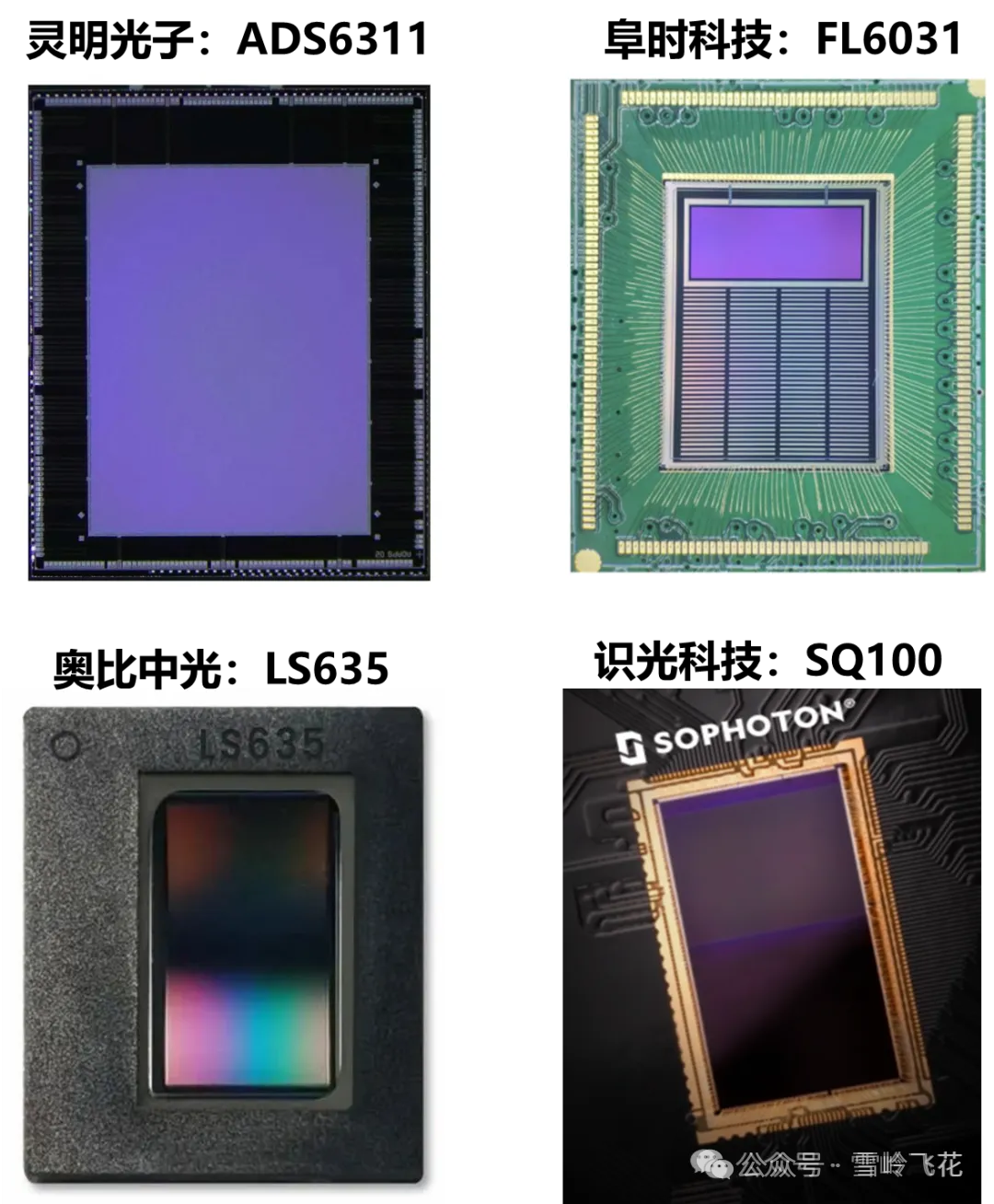
图片来源:灵明光子

图片来源:Yole,《Lidar for Automotive 2025》
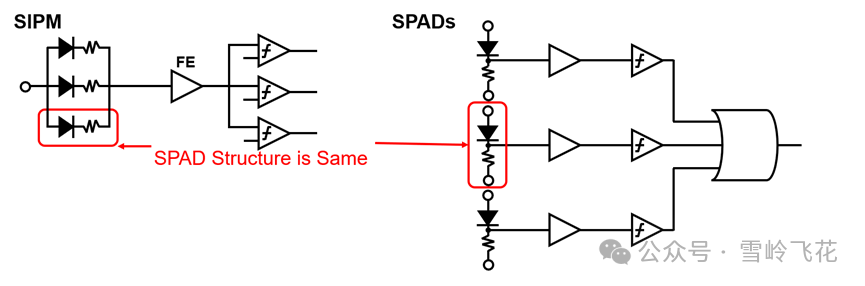
SiPM和SPADs是目前应用最为广泛的多点接收单元,两者的最小感光单元完全相同,都是工作在盖革模式的APD(即SPAD单体)。
从电路的角度,SPADs和SiPM在使用方式上唯一的区别(也是本质区别)是:
1)SiPM从一定数量的SPAD单体像素中收集信号,然后合并输出一个模拟信号。
2)SPADs以数字的方式合并多个SPAD单体像素,并以数字信号的形式输出。
2. SiPM
1)基本结构
SiPM通常由1个或者多个SiPM像素单元组成,每个SiPM像素单元又由许多(几百~上万个)SPAD单体和淬灭电路并联而成。SiPM结构如下:
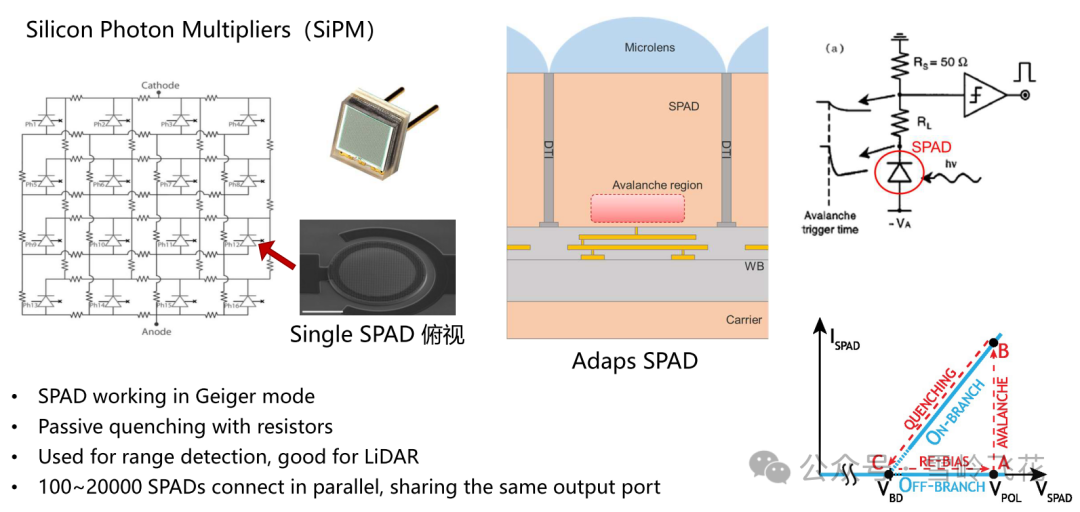
图片来源:灵明光子
使用SiPM的时候,一般需要配置TIA、多阈值比较器、ADC和FPGA等器件。

2)工作原理
图片来源:滨松
SiPM通过判断发生雪崩的SPAD单体数量,就可以直接测量光强,通过多比较器和波形分析,即可提取真实目标的信号。1个SiPM像素内SPAD单体的数量越多,计数能力(分辨能力)越强。
SiPM的结构和信号读出原理:
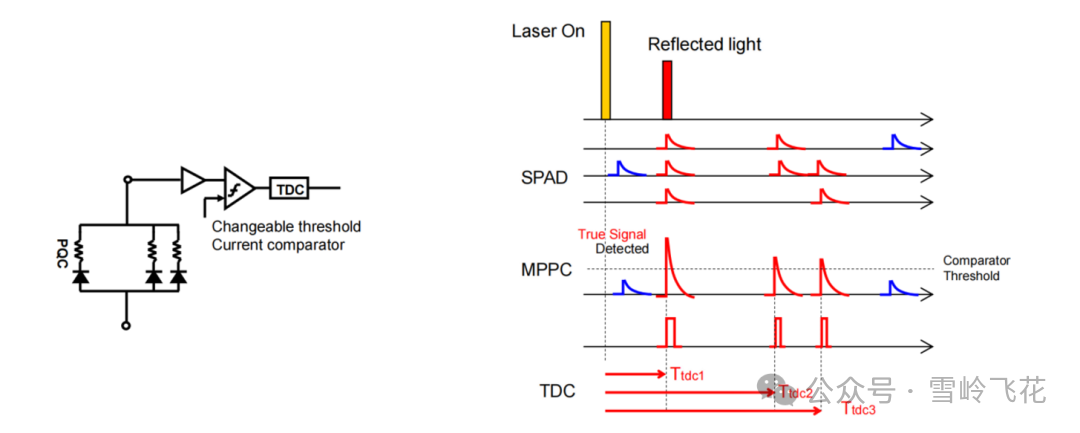
图片来源:滨松(图中的MPPC是滨松对SiPM的命名)
3. SPADs
下图是SiPM和SPADs方案的典型电路对比:
SPADs的结构和信号读出原理:
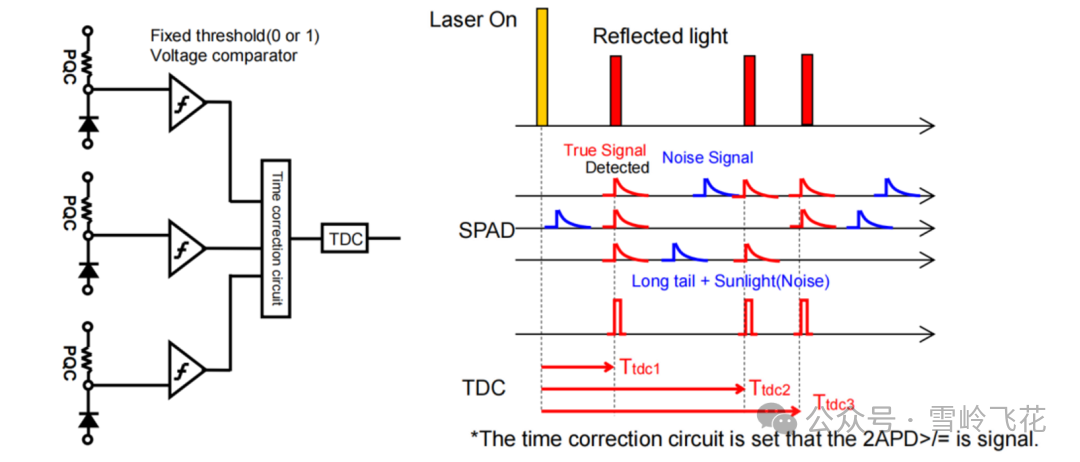
图片来源:滨松
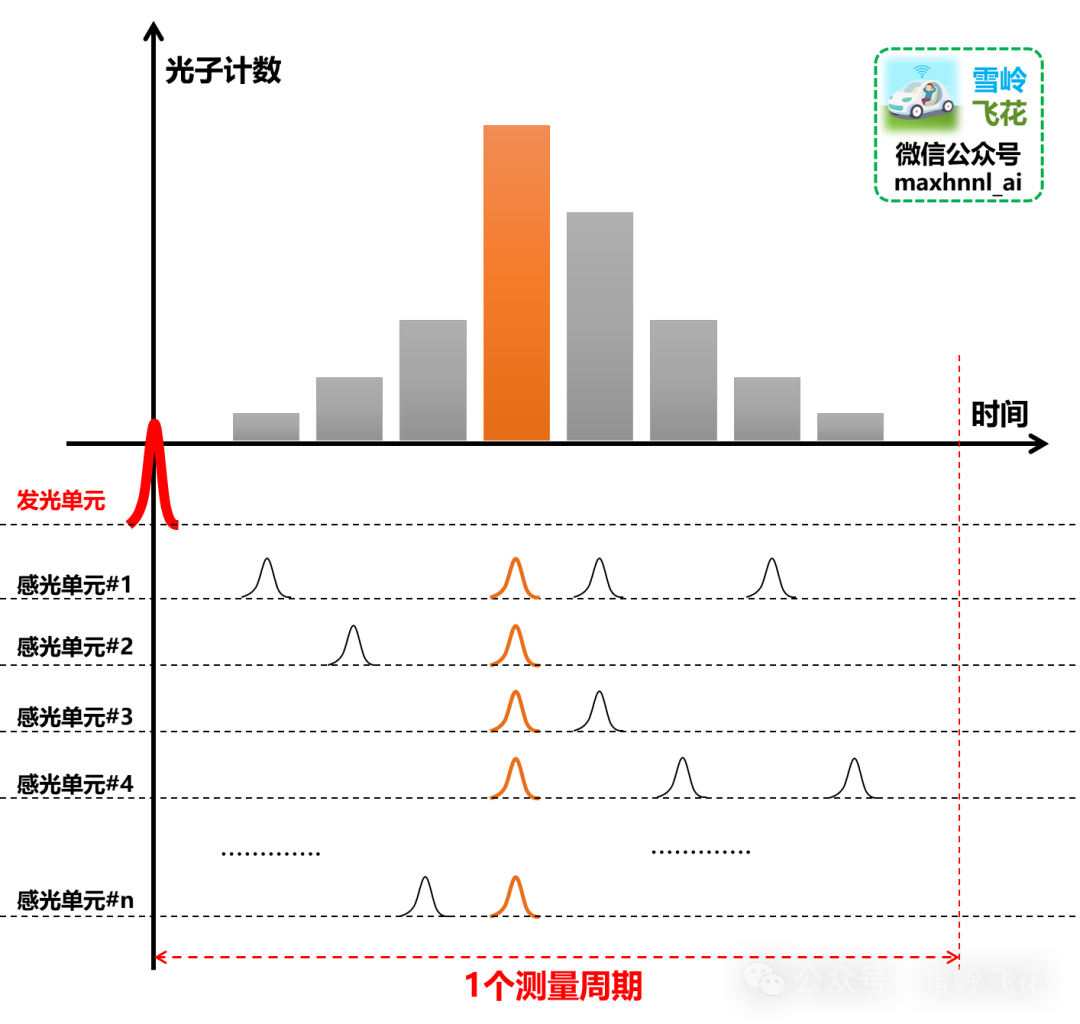
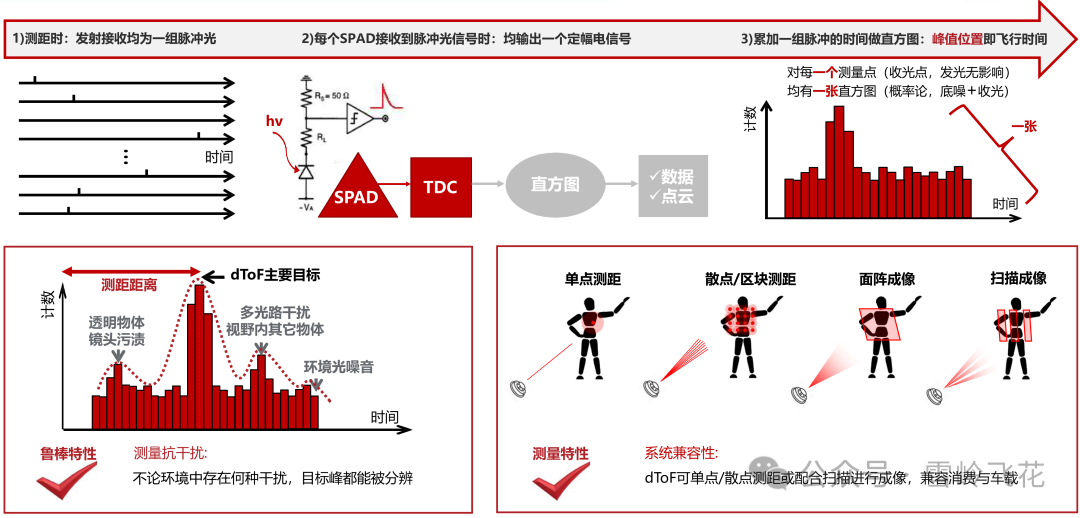
SPADs的每一组输出的信号只有数字信号0和1,无法直接获取强度信息,需要通过后续的统计直方图寻找峰值来计算,例如TSCPC方法。
TCSPC通过记录在固定时间内光子事件的频次及到达时间,还原出光子事件数随事件变化的直方图,进而拟合出目标的深度信息。TCSPC方法具有很高的时间精度、时间分辨率和光子利用率,是目前主流的测距方案。
02
SPADs为什么会是主流?
车载激光雷达产业链正朝着高性能、小体积、低成本的方向快速发展,其中数字化和固态化是其中重要的技术手段。
1. 角分辨率高
角分辨率主要取决于有效像素数,像素数越高,角分辨率越高。
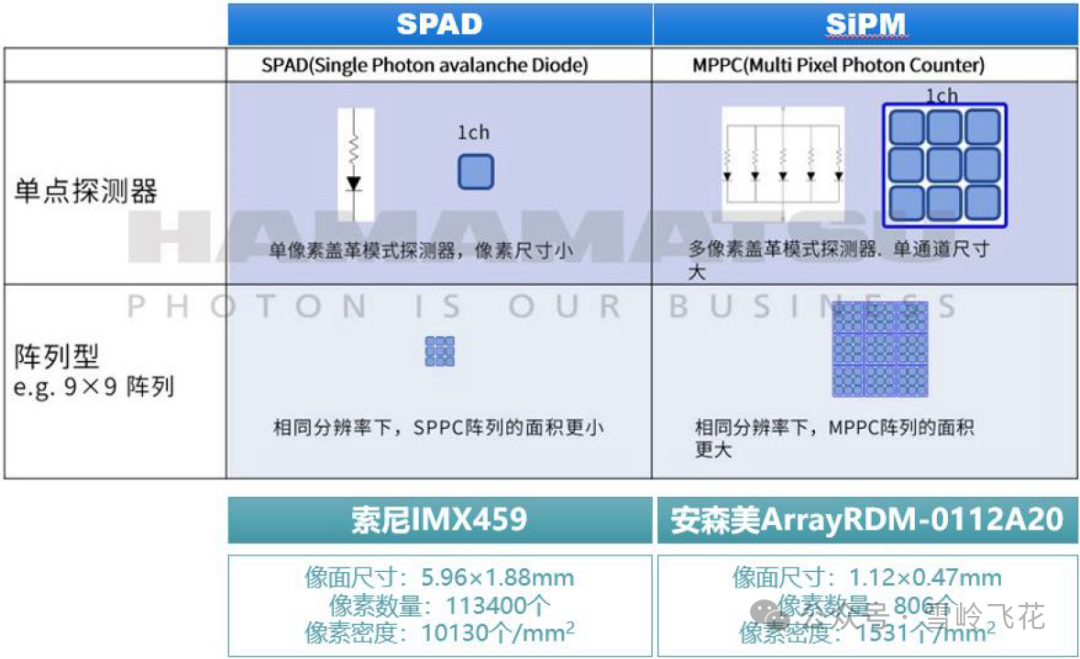
SPADs的单位面积像素数远高于SiPM,例如:索尼IMX459的单位面积像素数为10130个/mm2,而安森美车规级SiPM ArrayRDM-0112A20的为1531个/mm2。
图片来源:滨松
如果采用SiPM方案,如果希望实现和SPAD方案同样的线束数量,需要并联更多的SiPM模块,使得激光雷达成本提高,并且体积更大,导致整车布置也更困难。
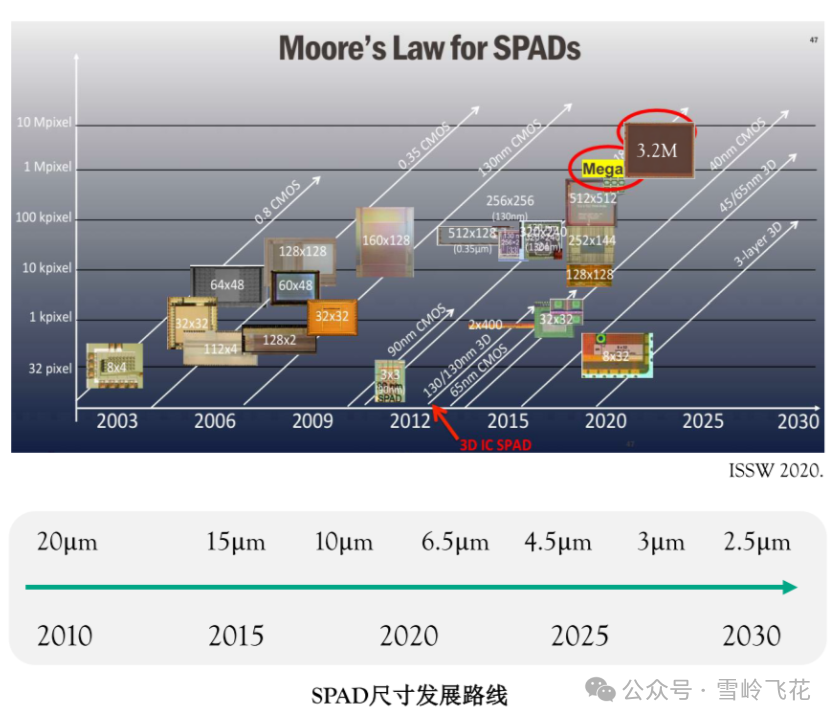
目前,SPADs的像素密度还在不断的提升中,SPAD单体的间距在不断缩小,有些比较新的SPADs产品的单体间距甚至已经到了2.2um。
图片来源:北极芯微
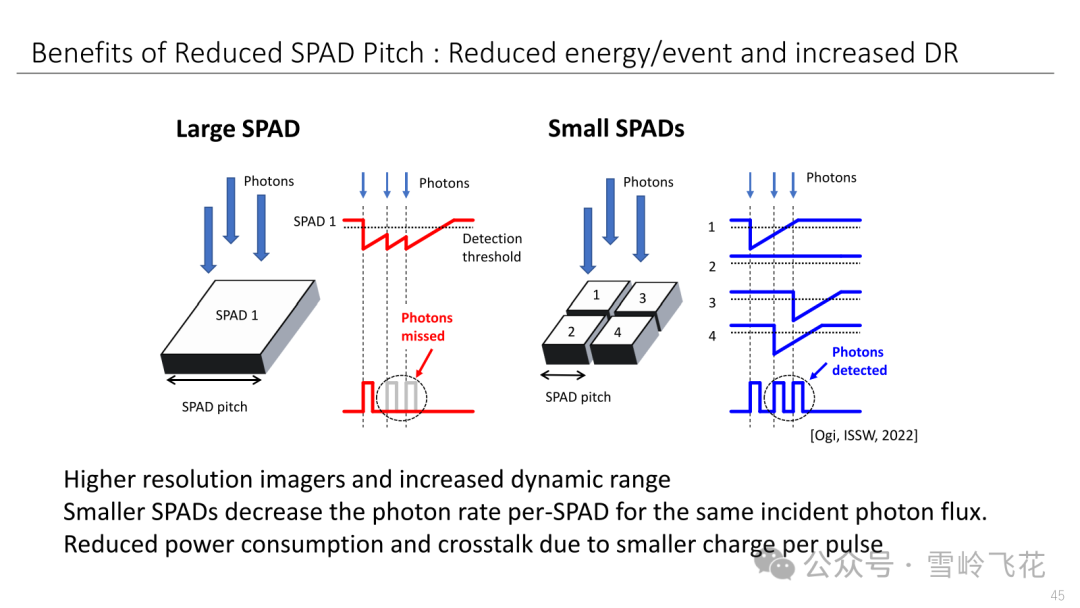
同时,更小的SPAD阵列还能够提升灵敏度和动态范围。不过,也会使得串扰和抖动的挑战更大。
2. 数字化信号处理
SiPM输出模拟信号,后续还需要一系列信号处理和模数转换。在这个过程中,不可避免地会引入噪声,导致信噪比的衰减,影响检测灵敏度。
SPADs可以利用TDC直接进行数字化的结果输出:
图片来源:灵明光子
采用SPADs方案的信号处理链路:
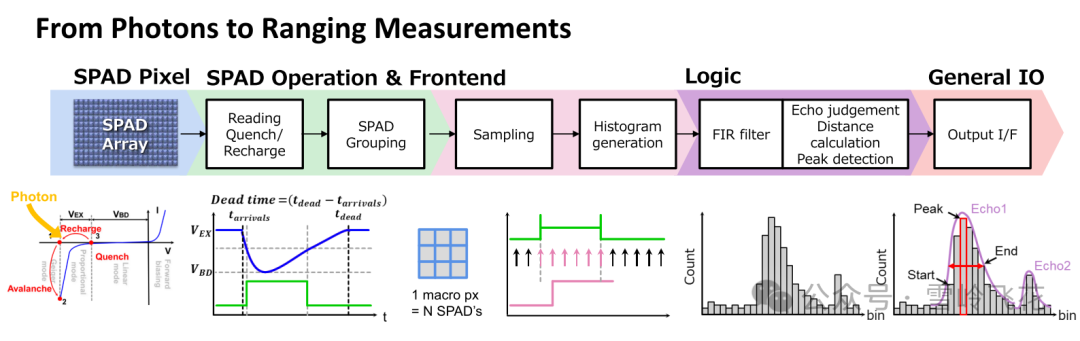
图片来源:Sony
因此,由于采用数字化的信号处理架构,使得SPADs具备如下优势:
读出噪声小,数字信息的直接传递,无需ADC,信噪比高。
通过TDC进行光子数量计算,TDC的容量扩展容易,动态范围大。
灵敏度高,可以实现微光高速成像。
3. 集成度高、体积小、成本低
SPADs和SiPM的架构差异:
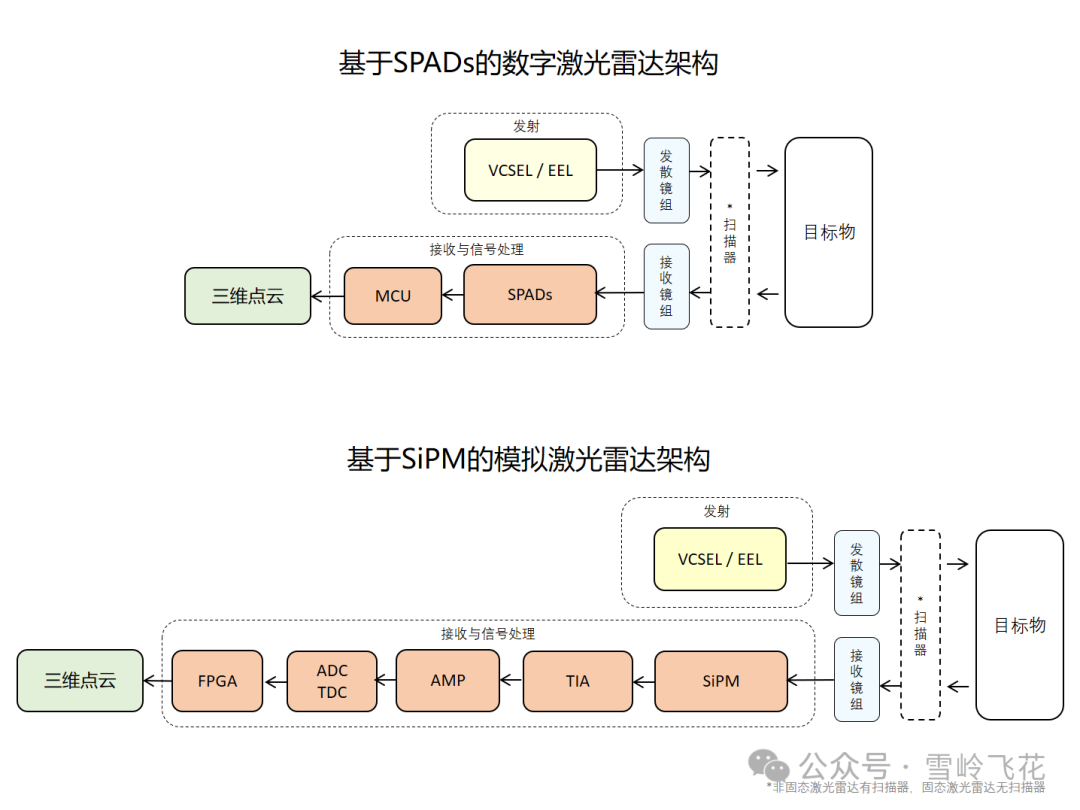
图片来源:速腾聚创
而SiPM通常很难将SiPM阵列和后端电路集成在一起。虽然也有厂家尝试将SiPM和ASIC合封到一个芯片中,以提高集成度,但是和SPAD-SoC的集成度还是差距较大。
SPAD-SoC和SiPM的集成方案对比:
因此,采用SiPM方案的电路通常更为复杂,例如,如下采用SiPM的某激光雷达接收板:
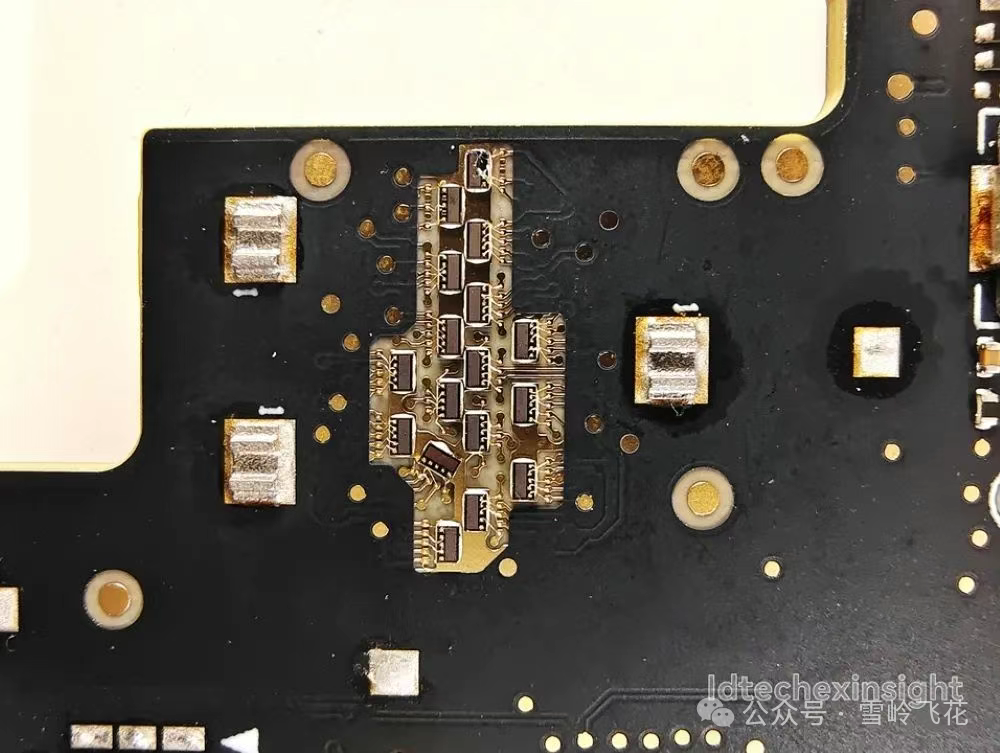
图片来源:Idtechexinsight
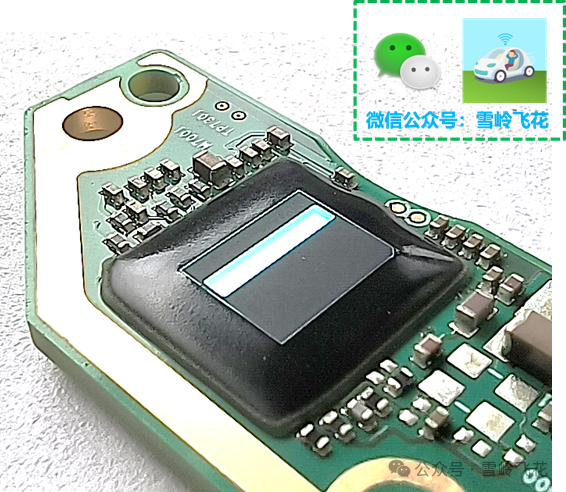
如下是采用的SPAD-SoC方案华为D3激光雷达,集成度大大提升:
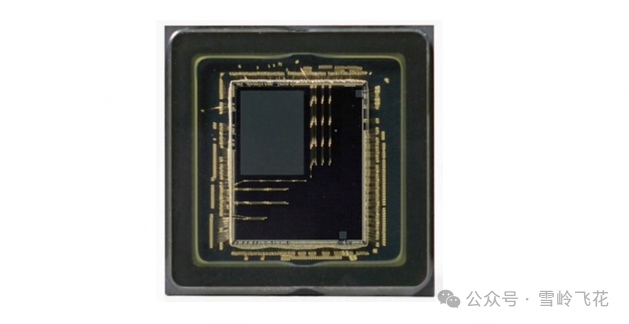
这是一片来自Sony的SPAD-SoC(IMX459),架构示意图:
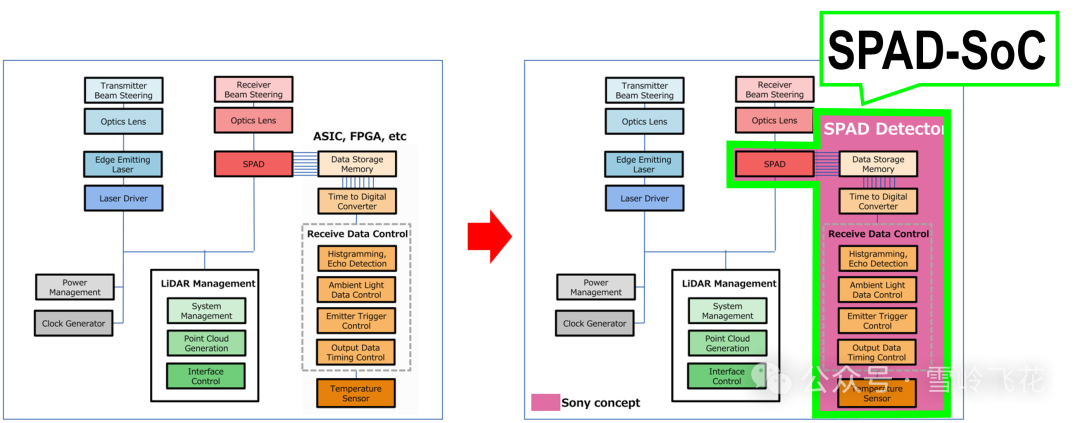
图片参考:Sony
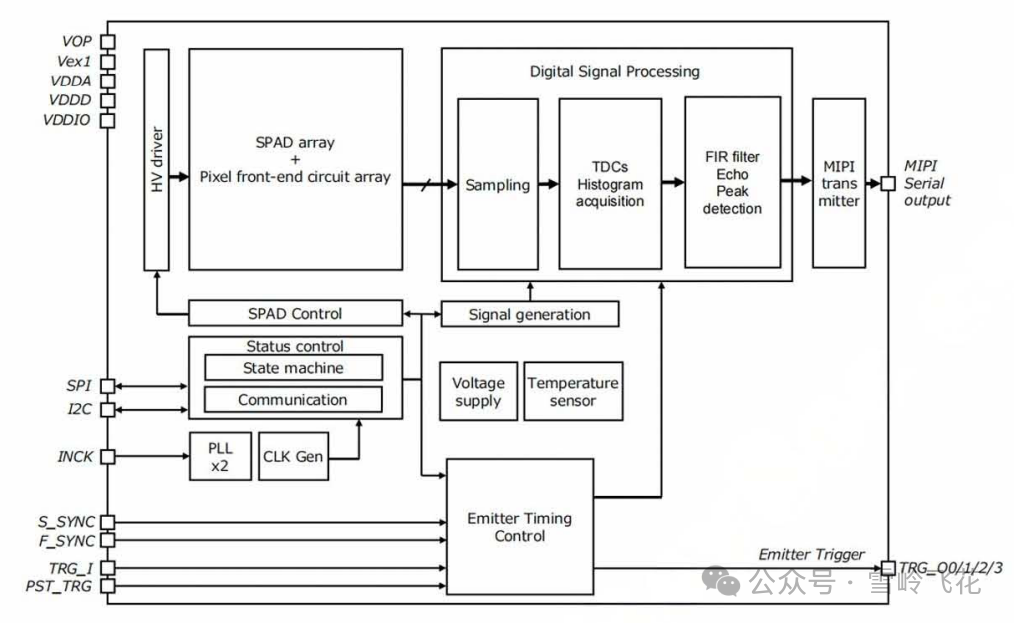
Sony IMX479(IMX459的下一代产品)的系统原理图:
除了集成度高、成本低之外,SPAD-SoC还使得各模块间的数据传输带宽更大,延迟更低。
4. 全固态
全固态激光雷达的降本潜力更大,目前在市场应用中,激光雷达正在从半固态到纯固态方向演进。
目前全固态方案主要以Flash方案为主,而Flash激光雷达最适合采用的接收单元就是面阵型SPADs芯片。
由于收发器件的性能限制,目前Flash激光雷达主要用于补盲场景:
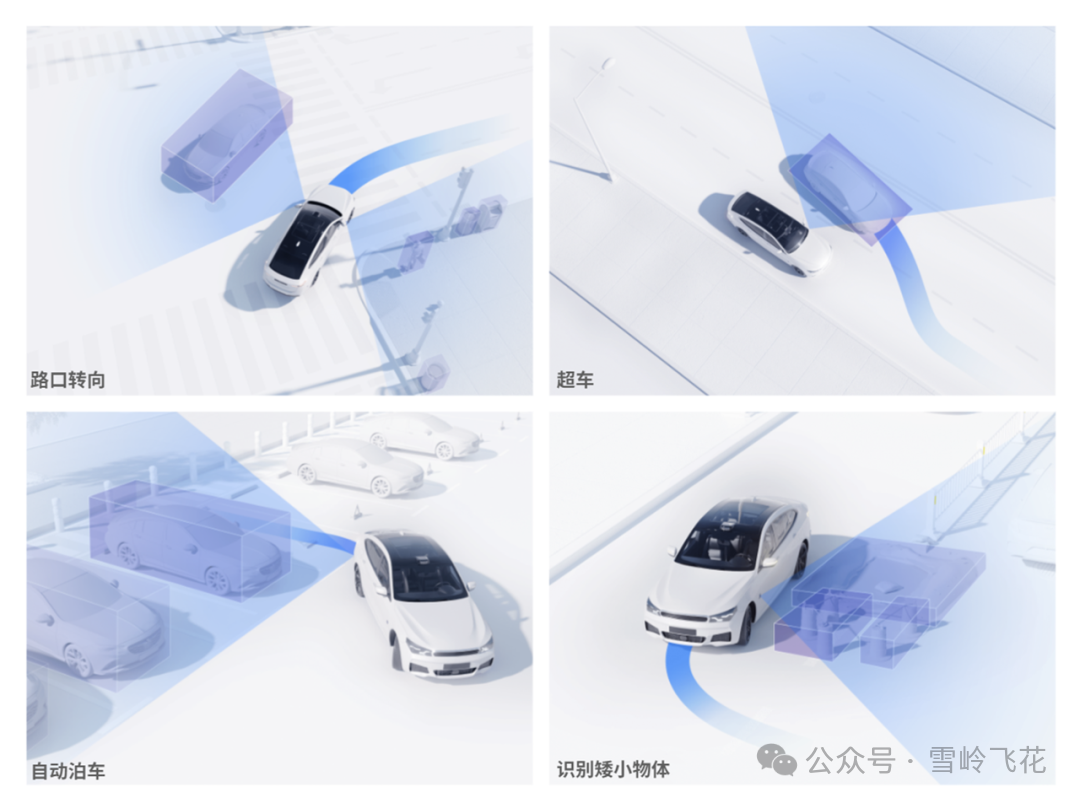
图片来源:禾赛
据了解,有厂家的纯固态前向Flash主雷达的样机正在开发中,可以在120°FOV的视场角下,达到200m的检测距离。(如需要交流细节,请私信雪岭)
03
SPADs的主要挑战
不过,SPADs肯定还是存在一些挑战,例如死时间较长,完成单次测距测量时间较长(SPADs需要多次采样,统计寻峰)、ASIC处理功耗较高,以及强光/高反影响较大(饱和和串扰)、工艺难度高等。
1. 饱和和串扰
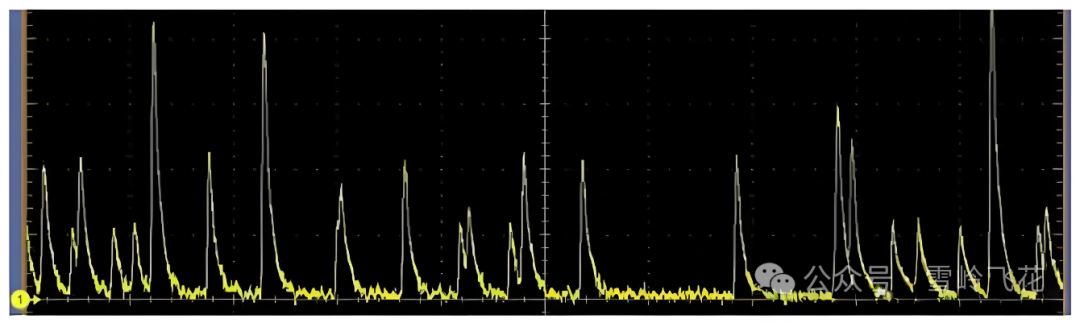
SPADs由于灵敏度高,因此光干扰问题较为普遍,尤其是强烈日光的干扰。
强烈的阳光入射,会导致多个SPAD单元饱和,并且在恢复初始状态前都无法吸收光子,因而有可能漏掉真正的反射信号。
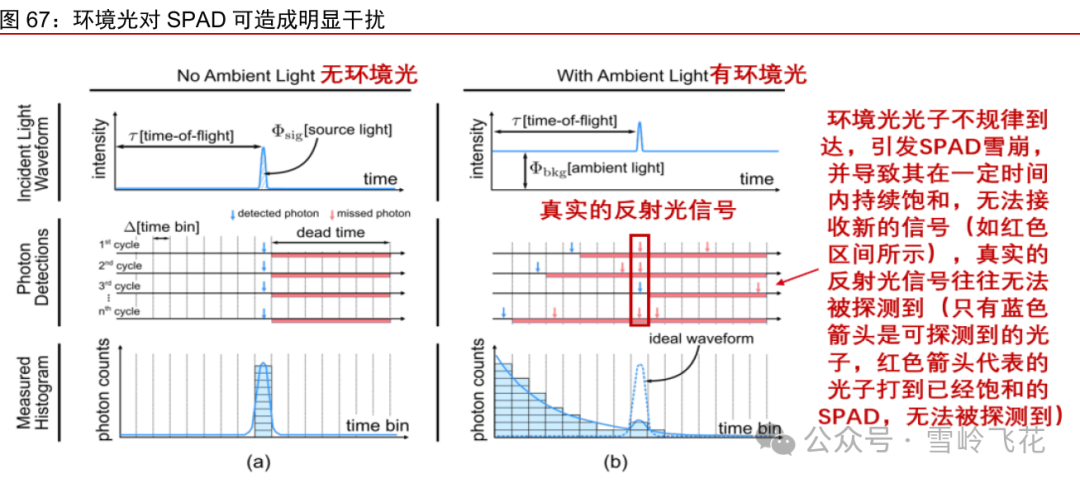
资料来源:Anant Gupta et al.《Photon-Flooded Single-Photon 3D Cameras》,arxiv,中信证券研究部
另外,由于感光单元距离很近,串扰问题也有更大的挑战。SPAD阵列密度越高,串扰问题就越明显。串扰会导致高反膨胀、鬼影等问题。
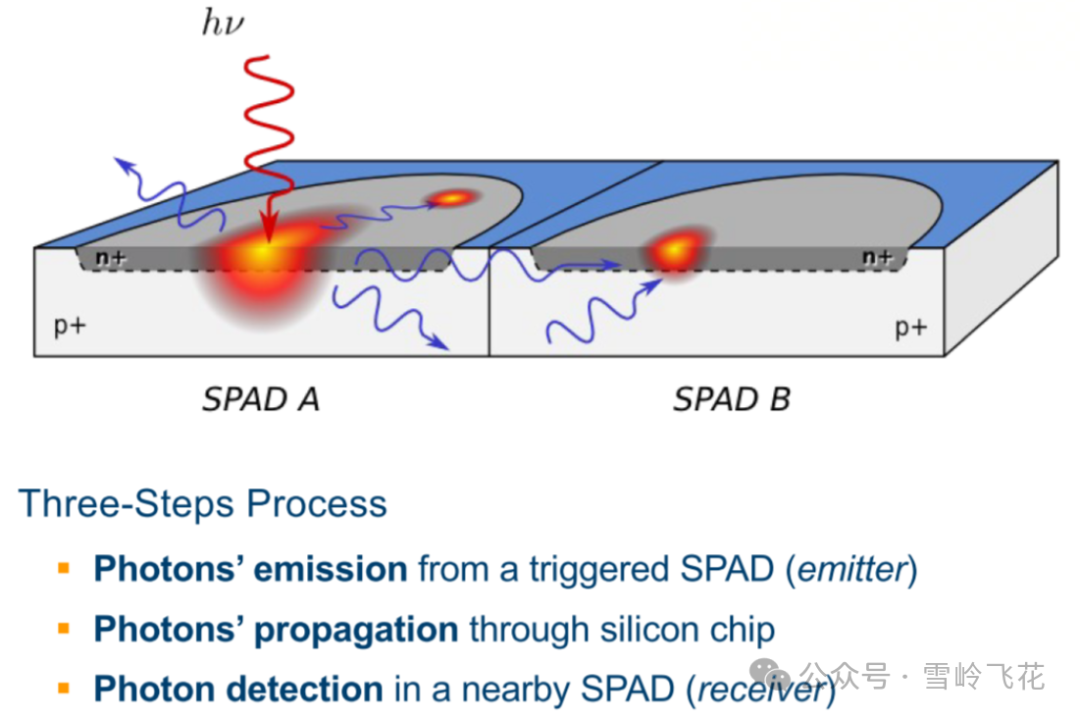
图片来源:Angelo Gulinatti
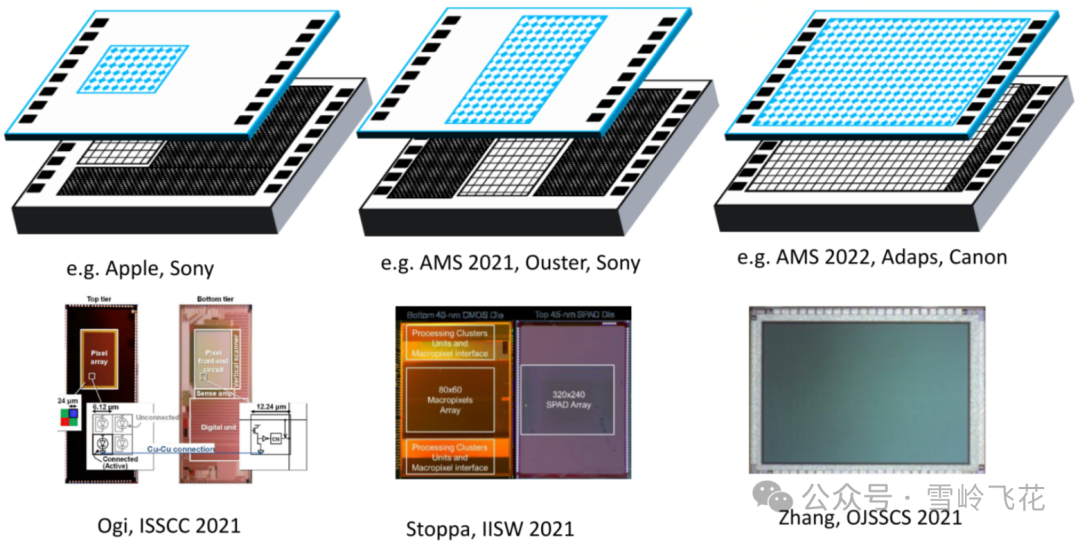
2. 工艺难度高
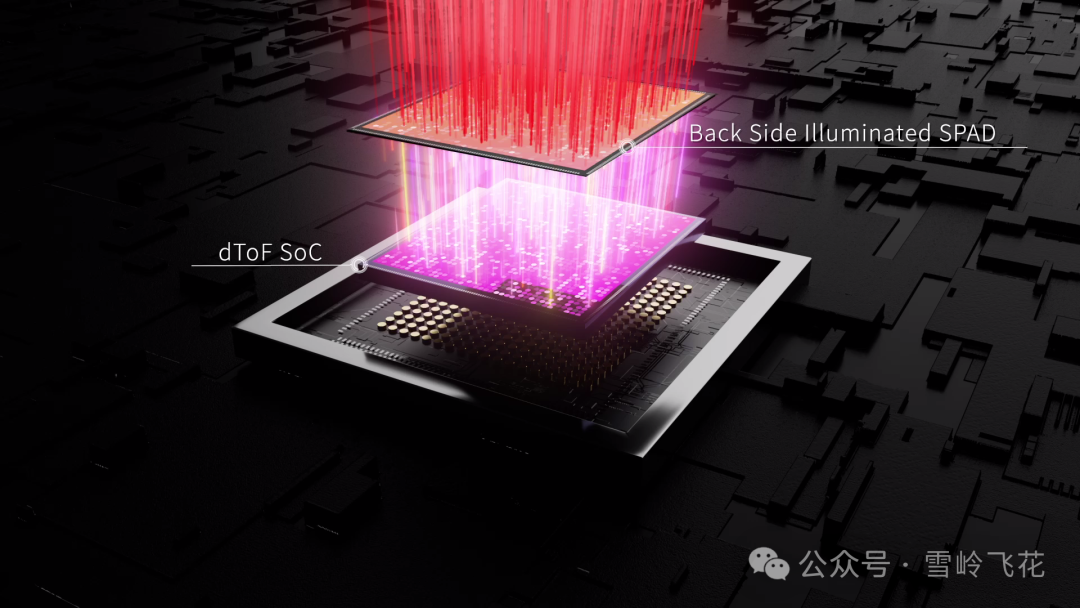
1)上层为单光子像素阵列(SPAD Pixel);
2)下层为读出电路(Readout circuit),即包含了高精数字时间采样模块(TDC)、单光子测距引擎(TCSPC)、专用数字信号处理器(DSP)、激光雷达控制中心(MCU)等关键模块。
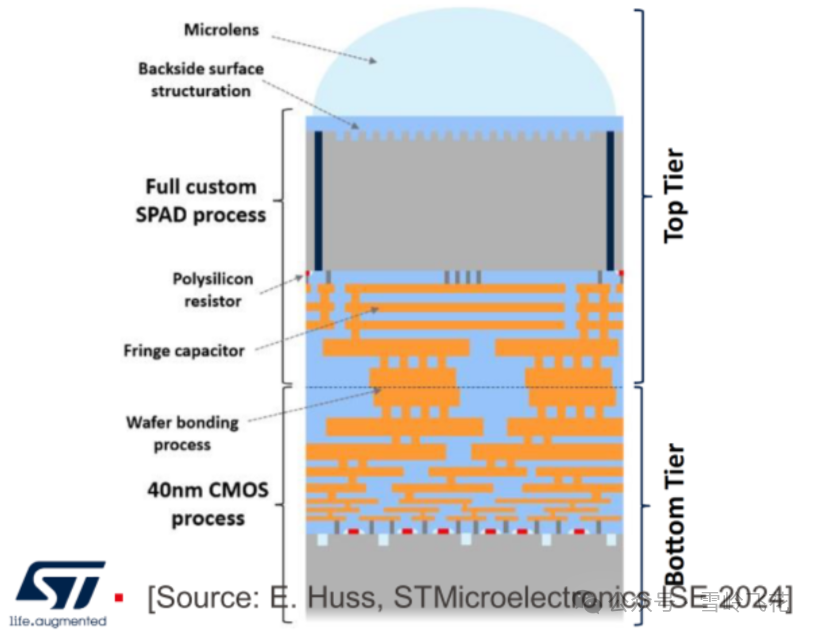
“背照式3D堆叠”可以快速将感光信号传输到下层芯片,进行信号的存储以及统计运算,从而提升信号处理性能。
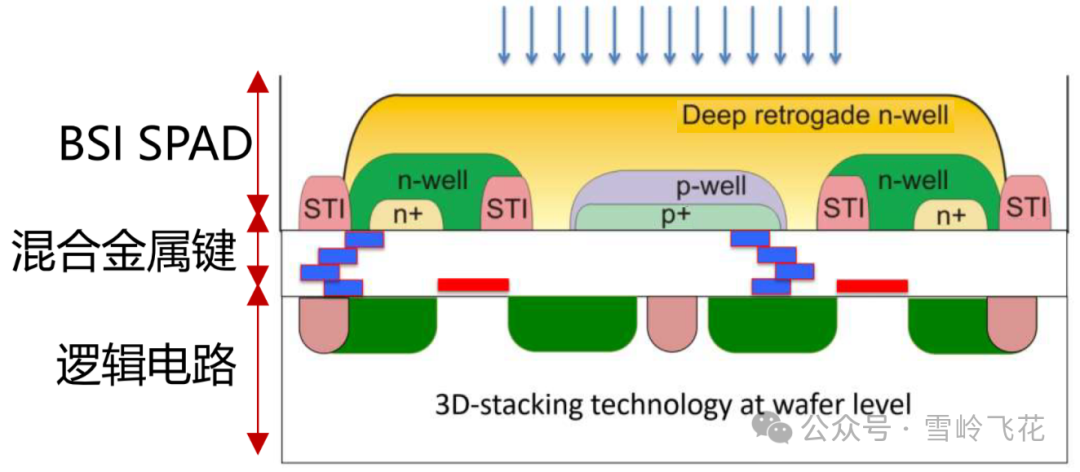
“背照式3D堆叠”需要使用先进的混合金属键合(hybrid bonding)工艺,该工艺将两个芯片进行金属融合并且对接,下图为上下晶圆金属键合工艺的 SEM 照片:
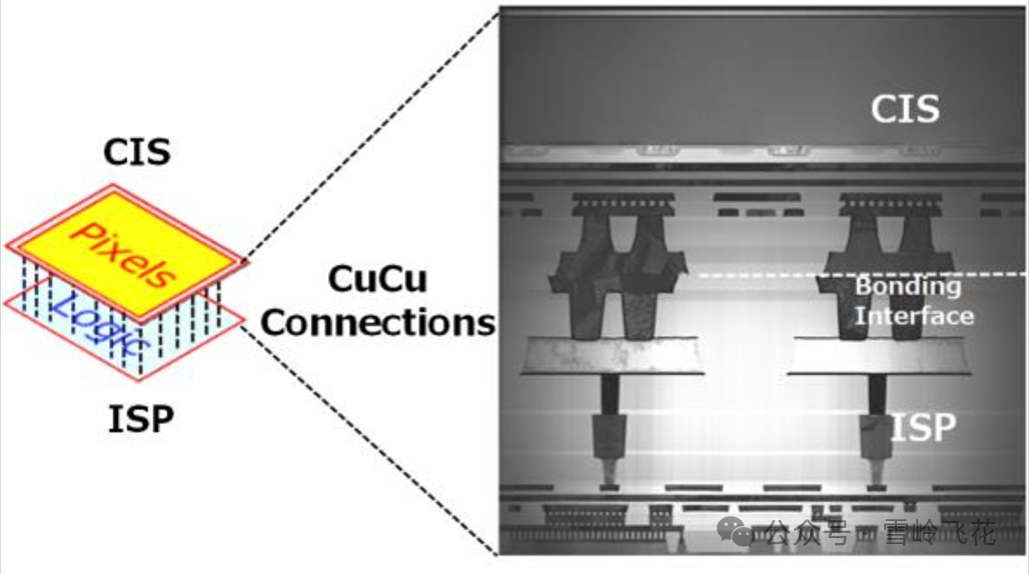
该工艺需依靠与晶圆厂紧密配合完成,工艺操作难度很大,需要确保上下晶圆层的高精度(对准精度尺寸需
采用3D堆叠工艺的不同面积的SPAD阵列:
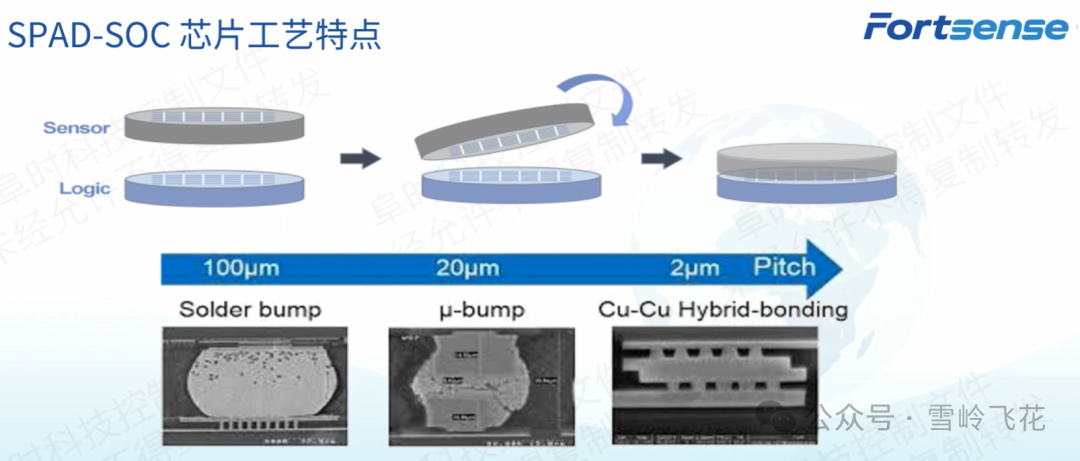
不过,在行业的不断努力下,通过采取诸多措施,SPAD这些挑战正在被逐步克服,例如:
图片来源:阜时科技
04
SPADs的应用
速腾聚创的部分产品采用的收发器件方案:

其中,速腾M系列产品主要是采用SiPM方案,不过后续的许多主打产品都将全部使用SPADs方案:纯固态激光雷达(E1和E1R)、半固体激光雷达(EMX和EM4)以及机械式360°激光雷达Airy。
速腾的数字化产品矩阵:
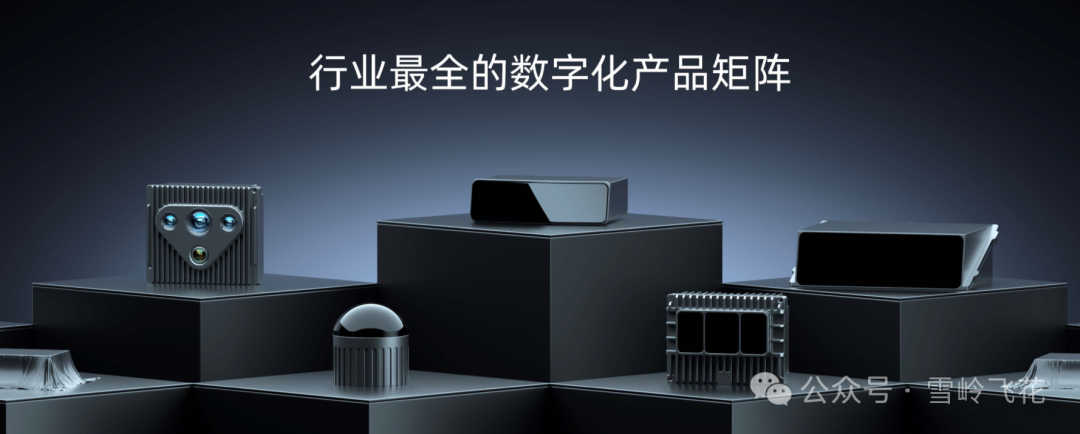
其中,E1是纯固态Flash激光雷达的代表,EM4是高线束前向雷达的代表。
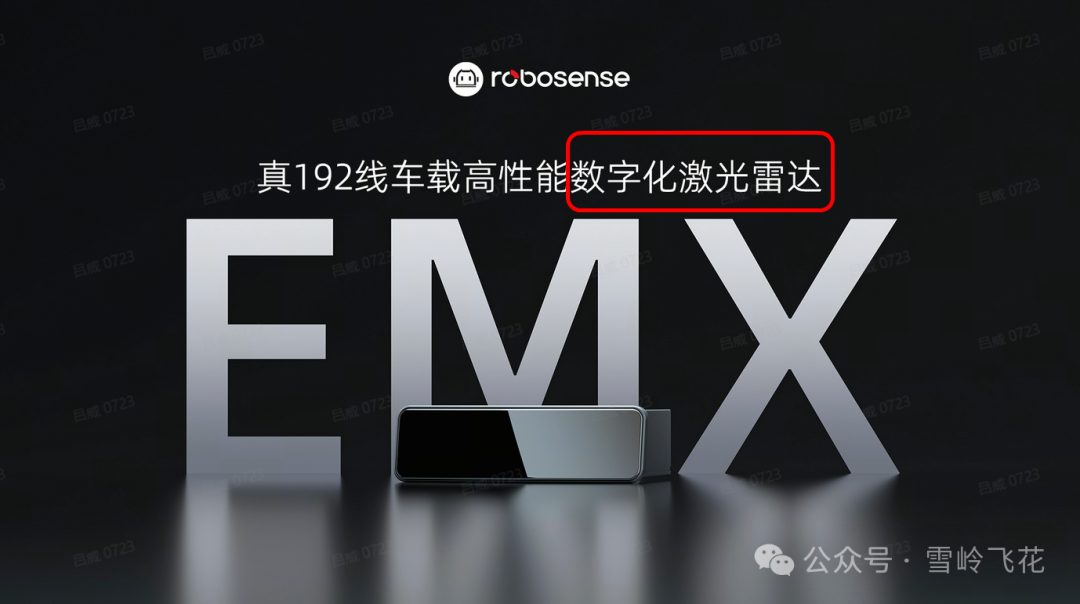
速腾的EM4产品:

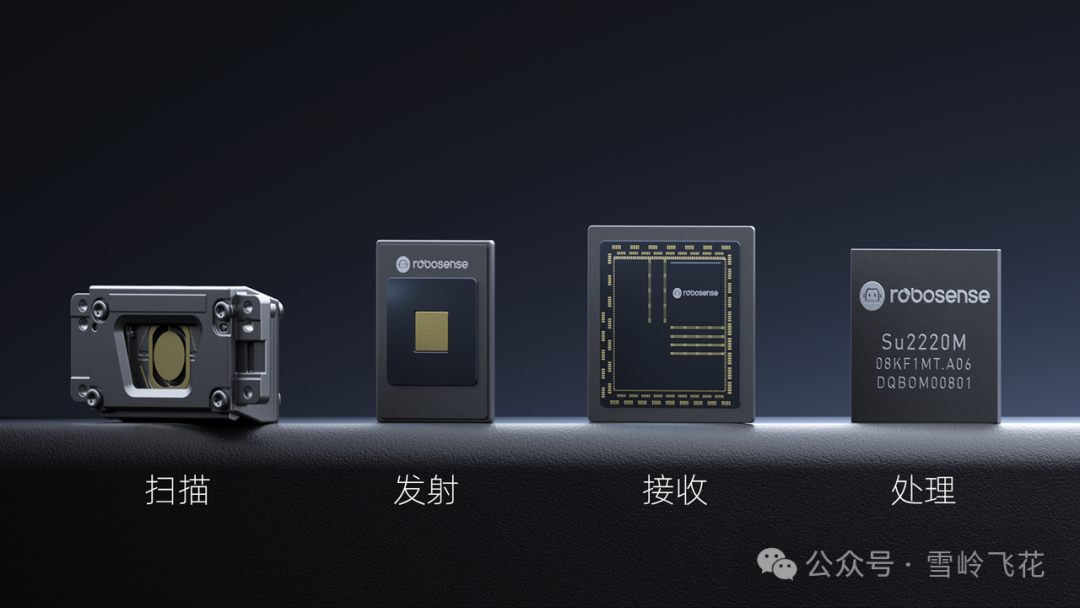
速腾聚创已完成全栈芯片化,结合成熟的一维、二维、面阵扫描技术,可以快速定制不同形态激光雷达产品,就像做相机一样简单。
速腾的全栈激光雷达芯片:
速腾聚创自研的SPAD-SoC芯片于2018年立项,2022年面世,已经应用在E1/E1R全固态激光雷达上,目前已经多款汽车及机器人产品上量产落地。

如下是速腾聚创第一代SPAD-SoC:
结构示意图如下:
这颗SPAD-SoC的主要特点:
1)采用方形面阵(120°×90°视场角,576×432 像素),适用于面阵型Flash激光雷达。
2)面阵规模超过25万像元,比IMX459多1.5倍,接收效率提升了20%。
3)采用先进的3D堆叠工艺,将SPAD阵列和高性能SoC集成到一颗芯片,实现数字SPAD-SoC单芯片直接处理生成点云,原始信号不失真,大幅简化系统链路,产品的尺寸小、功耗低。
禾赛从2020年开始布局SPAD技术。
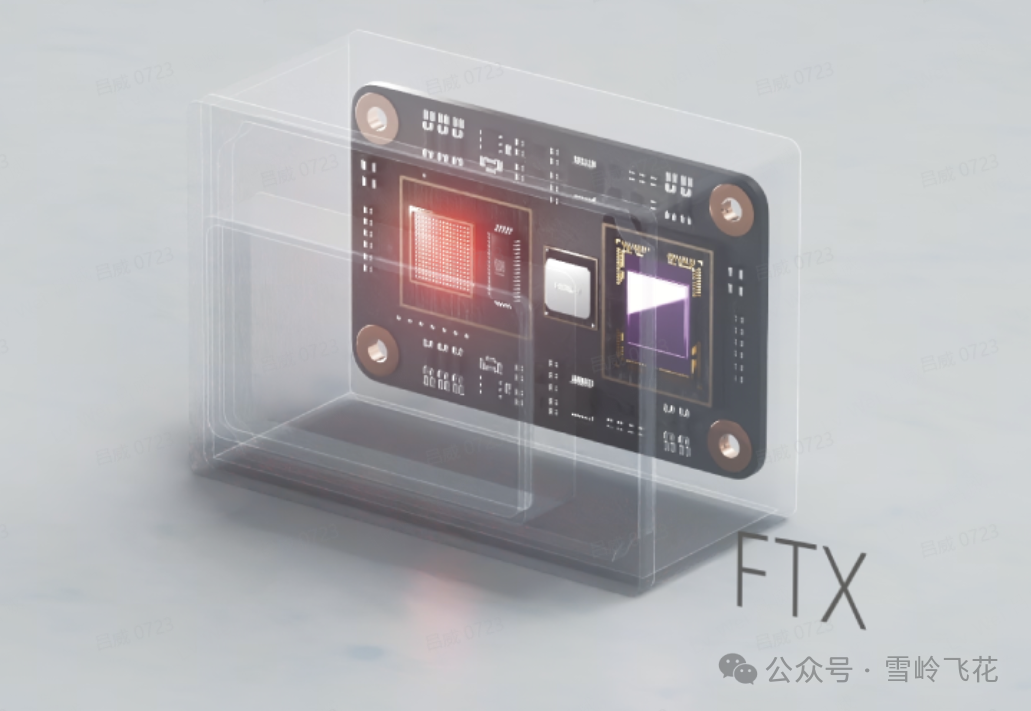
2023年底,禾赛完成了对瑞士芯片设计公司Fastree 3D的战略并购。此次战略并购,禾赛将其SPAD核心专利技术深度嵌入到自研的第四代芯片架构平台,并应用于FTX。
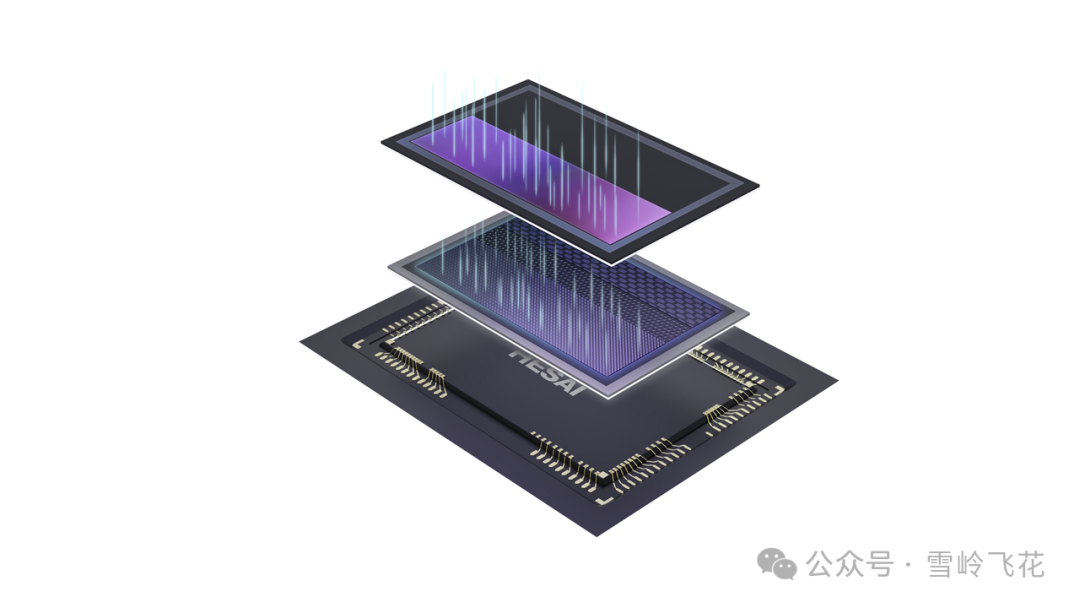
禾赛自研的3D堆叠SPAD面阵探测器:
禾赛FTX搭载SPAD-SoC:
05
结语
图片参考:灵明光子
文章转载自公众号:雪岭飞花
作者:雪岭飞花
原文链接:https://mp.weixin.qq.com/s/ANMP9PYOoOBQ60T7Utt_Cw

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)