
1.环境升级
📙J6 量产版本 | J5 CS版本 | |
python | 3.10 & 3.11 | 3.8 |
torch | 2.3.0+cu118 | 1.13.0+cu116 |
torchvision | 0.18.0+cu118 | 0.14.0+cu116 |
ONNX | 1.15.0 | 1.8.0 |
X86 GCC | 12.2 | 5.4 |
Linaro GCC | 12.2 | 9.3 |
上述J6量产版本以OE3.2.0为例,J5 CS版本以OE1.1.74为例;
torch版本即将升级到2.6+cuda12.6。
1.1 docker开发
由于老版本docker存在一些兼容性问题(如工具运行失败,python包import失败等异常问题),因此使用J6计算平台的docker时需要确保docker版本满足如下要求:
Docker(20.10.10或更高版本,建议安装20.10.10版本)
NVIDIA Container Toolkit(1.13.5或更高版本,建议安装1.15.0)
1.2 本地部署
| horizon-tc-ui 模型集成 | horizon-nn 模型转换 | horizon-plugin-pytorch Pytorch量化插件 | hbdk 编译器 |
J6 whl包名称 及版本号 | horizon_tc_ui 3.x.x | hmct 2.x.x | horizon-plugin-pytorch J6 & J5共版本
| hbdk4-compiler 4.x.x |
J5 whl包名称 及版本号 | horizon_tc_ui 1.x.x | horizon-nn 1.x.x | hbdk 3.x.x |
由于J5和J6的horizon-tc-ui以及模型转换分开发版,因此无法在同一个环境中同时安装J5和J6的PTQ模型转换环境。建议使用docker开发。
2.算法开发
2.1 浮点模型准备
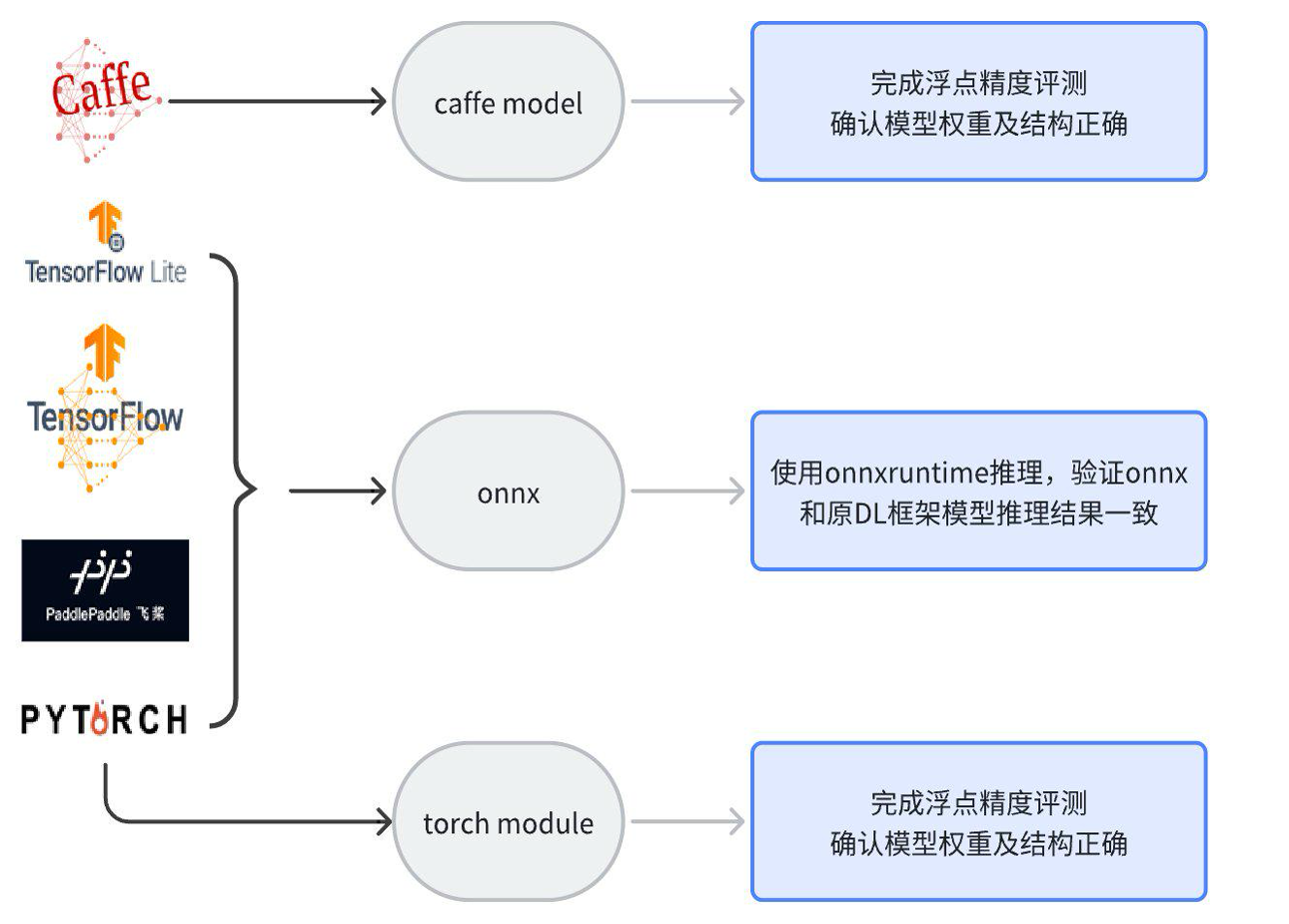
J6和J5计算平台支持的DL框架范围一致,Pytorch框架支持导出为onnx进行模型转换编译,也提供了量化插件用于直接转换编译torch module;支持直接转换caffe模型;其他框架导出为onnx即可支持。各框架版本支持情况如下:
📙J6 量产版本 | J5 CS版本 | ||
onnx
| 推荐版本 | 1.15.0 | 1.8.0 |
opset | 10-19 | 10、11 | |
ir_version | 不高于9 | 不高于7 | |
上述J6量产版本以OE3.2.0为例,J5 CS版本以OE1.1.74为例;
2.2 模型量化
2.2.1 PTQ
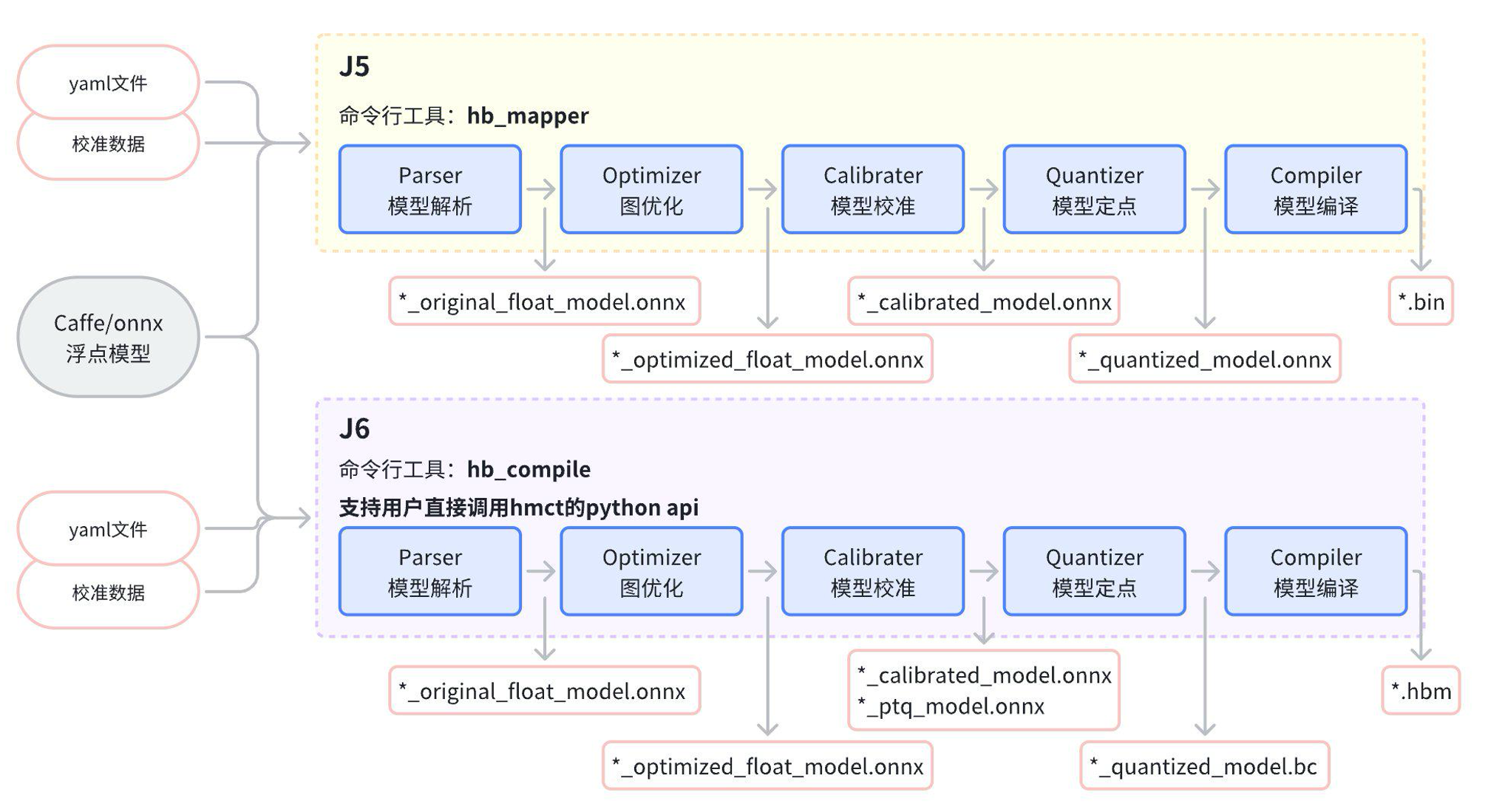
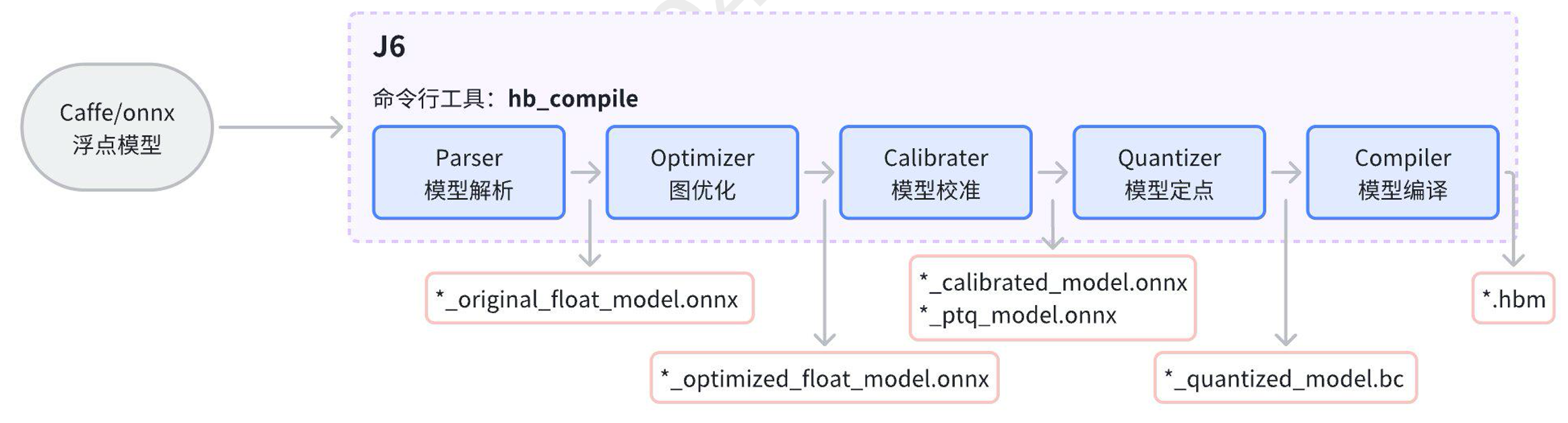
J5 和 J6 PTQ模型转换流程对比图
上图对比了J5和J6的转换流程,从使用流程上来说没有区别,J6为了支持用户灵活使用的需求,释放了Python API给客户。
2.2.1.1命令行工具
| J6 | J5 | |
转换命令
| 模型检查
| ||
快速性能评测
| |||
模型转换 | |||
精度调试 | 无 | ||
转换产物
| 模型解析 | *_original_float_model.onnx模型结构不受yaml配置参数的影响(插入前处理节点的过程后移至定点阶段,以简化量化过程的数据预处理),与原始浮点onnx完全一致,因此前处理代码与浮点模型保持一致 | 若配置input_type_rt为非featuremap格式,并配置了归一化相关参数,则*_original_float_model.onnx相较于原始浮点onnx会增加前处理节点,因此前处理代码相较于浮点模型需增加图像格式转换并去掉归一化 |
图优化 | *_optimized_float_model.onnx的前处理代码与*_original_float_model.onnx保持一致
| *_optimized_float_model.onnx的前处理代码与*_original_float_model.onnx保持一致
| |
模型校准 | *_calibrated_model.onnx、*_ptq_model.onnx的前处理代码与*_original_float_model.onnx保持一致 | *_calibrated_model.onnx主要用于精度问题debug阶段,前处理代码与*_original_float_model.onnx保持一致 | |
模型定点 | 若配置input_type_rt为非featuremap格式,并配置了归一化相关参数,则*_quantized_model.bc中会增加前处理节点,因此前处理代码相较于浮点模型需增加图像格式转换并去掉归一化 | 前处理代码与*_original_float_model.onnx保持一致 | |
编译 | *.hbm 前处理代码对齐业务部署需要 | *.bin 前处理代码对齐业务部署需要 | |
校准数据准备 | 格式 | 支持np.save保存的.npy文件,也兼容np.tofile保存的.bin文件 | 只支持np.to_file保存的二进制.bin文件 |
处理过程 | 保持与浮点模型前处理完全一致 | 需要将数据处理至input_type_rt*中间格式 | |
yaml参数
| 新增参数
| seperate_batch:沿第一维将输入节点做拆分,用于片上部署时不同batch的数据可以来源于不同的地址空间的场景。目前只支持onnx模型本身所有输入的第一维为1时,结合input_batch使用,原始模型输入第一维不为1,或者不同输入的batch需要不同的pyramid/resizer输入场景,请参考后文 2.3.2节多batch拆分 做处理。 | -
|
debug_mode:支持dump_all_layers_output、dump_calibration_data | |||
quant_config:支持通过json方式从模型、op type、以及单个op三个维度去灵活配置量化精度和校准方式(J5关于校准的相关配置仅作兼容,详细配置说明请参考后文2.2.1.3 quant_config配置说明) | |||
extra_params:支持input_no_padding、output_no_padding,可使得模型输入输出不带padding(有可能会对模型延时产生影响,建议实测确认模型性能是否满足预期) | |||
enable_vpu:模型参数组(model_parameters)新增参数,用于控制是否要启用vpu,当前版本仅支持量化/反量化加速 |
| ||
失效参数
| input_layout_rt:J6编译出的模型输入输出节点shape将保持与浮点完全一致,不再支持通过该参数做输入节点的修改。 | -
| |
norm_type:通过mean_value、std_value或者scale_value来配置归一化参数即可 | |||
calibration_type:该参数不再支持"load"模式,即J6不再支持load QAT训练后导出的onnx模型;同时该参数仅做兼容,量化配置建议使用quant_config | |||
2.2.1.2 Python API
考虑到J6支持对hbir做修改(如插入节点、修改节点名字等),因此为避免有灵活配置需求的PTQ用户无需在python脚本和命令行工具之间来回切换,因此将hmct(Horizon Model Convert Toolkit 模型转换工具)的API(接口说明请参考 用户手册-进阶内容-HMCT API Reference 章节内容)直接向用户开放,以下是一个简单的使用示例:
参考后续代码可将ptq_model.onnx转为.bc,并编译得到.hbm:
2.2.1.3 quant_config配置说明
完整的配置参数说明请参考 用户手册-训练后量化(PTQ)-PTQ转换工具-quant_config说明 章节的内容,本节仅介绍quant_config配置和J5配置方式的对应关系:
default校准
J6校准参数组只需配置校准数据集即为default:



mix校准
J6校准参数组只需通过quant_config打开layerwise_search即可:

其他配置说明
2.2.2 QAT
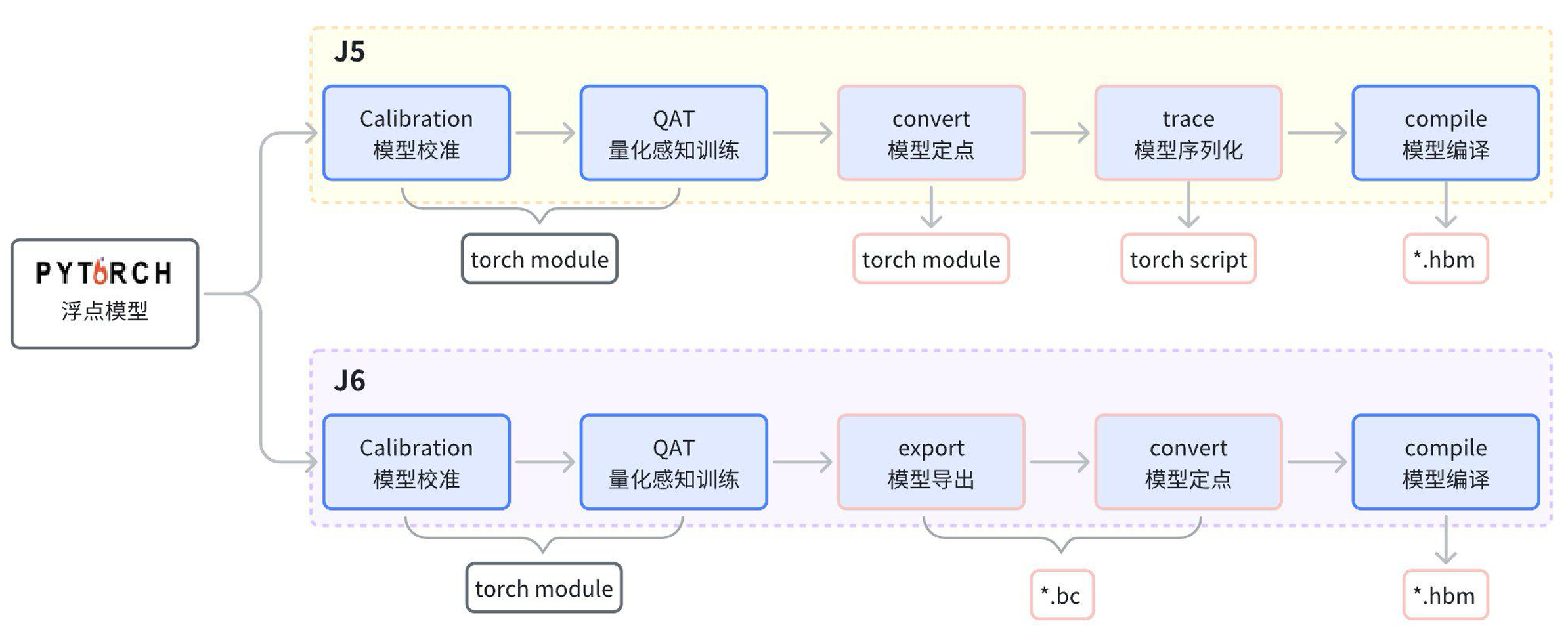
J5 和 J6 QAT模型转换流程对比图
J6 |
J5 |
| J6 | J5 |
量化训练 | 推荐使用J6新的prepare和qconfig配置接口(兼容J5),原接口依然兼容。新接口支持新的trace方式,兼具fx的易用性,同时又减少了fx固有的问题和限制(具体请参考用户手册 量化训练感知.开发指南.Prepare详解>章节)。 | - |
模型序列化 | 使用export接口将qat module导出成hbir格式
| 使用torch.jit.trace将quantized module导出成torch script格式 |
模型定点 | from hbdk4.compiler import convert | from horizon_plugin_pytorch.quantization import convert |
可视化 | from hbdk4.compiler import visualize 支持将hbir模型转成onnx格式进行可视化 | from horizon_plugin_pytorch.quantization import visualize_model 支持将序列化后的quantized.pt模型结构导出为.svg图片进行可视化 |
模型检查 | J6模型检查接口还在设计中,建议可以先通过编译O0模型来验证模型的可支持性 | from horizon_plugin_pytorch.quantization import check_model 若可支持,则会打印“This model is supported!” |
编译 | from hbdk4.compiler import compile 不再支持input_source和input_layout参数,适配方式请参考后文模型修改及编译章节 | from horizon_plugin_pytorch.quantization import compile_model
|
性能评测 | from hbdk4.compiler import hbm_perf | from horizon_plugin_pytorch.quantization import perf_model |
修改模型输入输出节点名称 | export接口支持指定模型以及模型输入输出名字
| hbdk-attach |
由上述对比可见,将J5模型迁移至J6时,若希望尽可能复用J5的部署代码,则不可避免的需要对模型做一些适配修改,因此需要依据下一章的介绍,写一个符合部署需要的J6模型编译脚本。
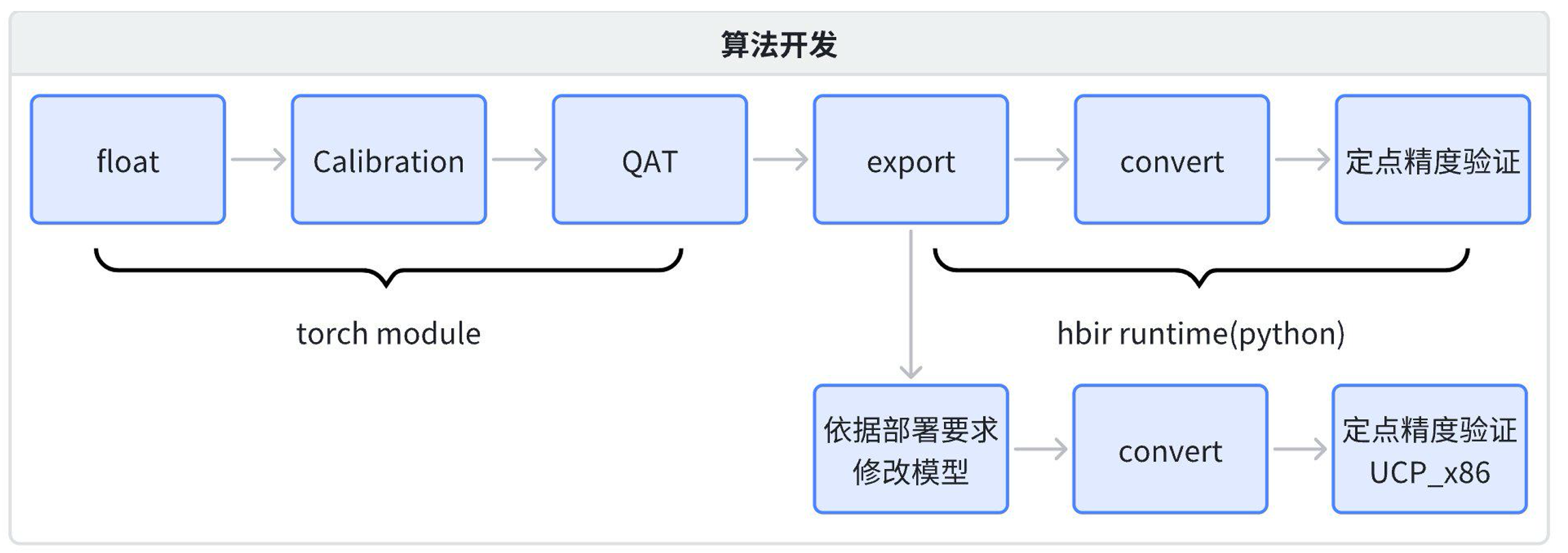
推荐依据上面流程图所示的方式进行J6模型开发:
若要确认部署模型精度指标是否达标,建议测试convert后的模型,有两种方案:
方案1:使用python api,复用python端前后处理,在cpu集群上评测quantized.bc
方案2:使用UCP_x86版本,使用部署前后处理代码,在cpu集群上评测quantized.bc(在x86端推理quantized.bc比.hbm快,推理代码与hbm完成一致)
2.3 模型修改及编译
因为实际部署中Pyramid输出数据都是独立的内存,为了简化实现、贴合部署,J6计算平台不再支持batchN pyramid输入(即不支持推理shape第一维不等于1的pyramid/resizer模型),图像输入类模型仅支持独立地址部署。非图像输入模型支持batchN(连续地址),也支持通过拆分batch来实现独立地址部署。
本章除2.3.1节ptq与qat链路导出.bc的方式有区别之外,2.3.2 - 2.3.5的内容不区分.bc的量化方式
由于PTQ链路默认不保存convert之前的.bc文件,若用户需要基于.bc做一些修改,可使用如下方式将ptq_model.onnx转为.bc:
2.3.1 指定模型输入输出节点名称
2.3.1.1 QAT
由于 export 后的 *.bc 模型输入/输出节点name的生成规则与J5 hbm不同,因此若需要尽可能复用J5的工程代码,则建议在 export 时指定一下模型的输入输出节点的name,同时也便于有多个输入/输出节点shape一样时,可以通过*.bc 或者 *.hbm 模型的name辨别与torch模型之间的对应关系:
若想生成的bc文件输入格式与之前版本保持一致,则建议在export过程中设置 native_pytree=False
2.3.2 多Batch拆分
典型应用场景:BEV模型在部署时,多V输入来源于不同的摄像头,因此需要将pyramid输入节点沿batch维度做拆分。
2.3.3 输入数据前处理
该操作请在 convert 前完成
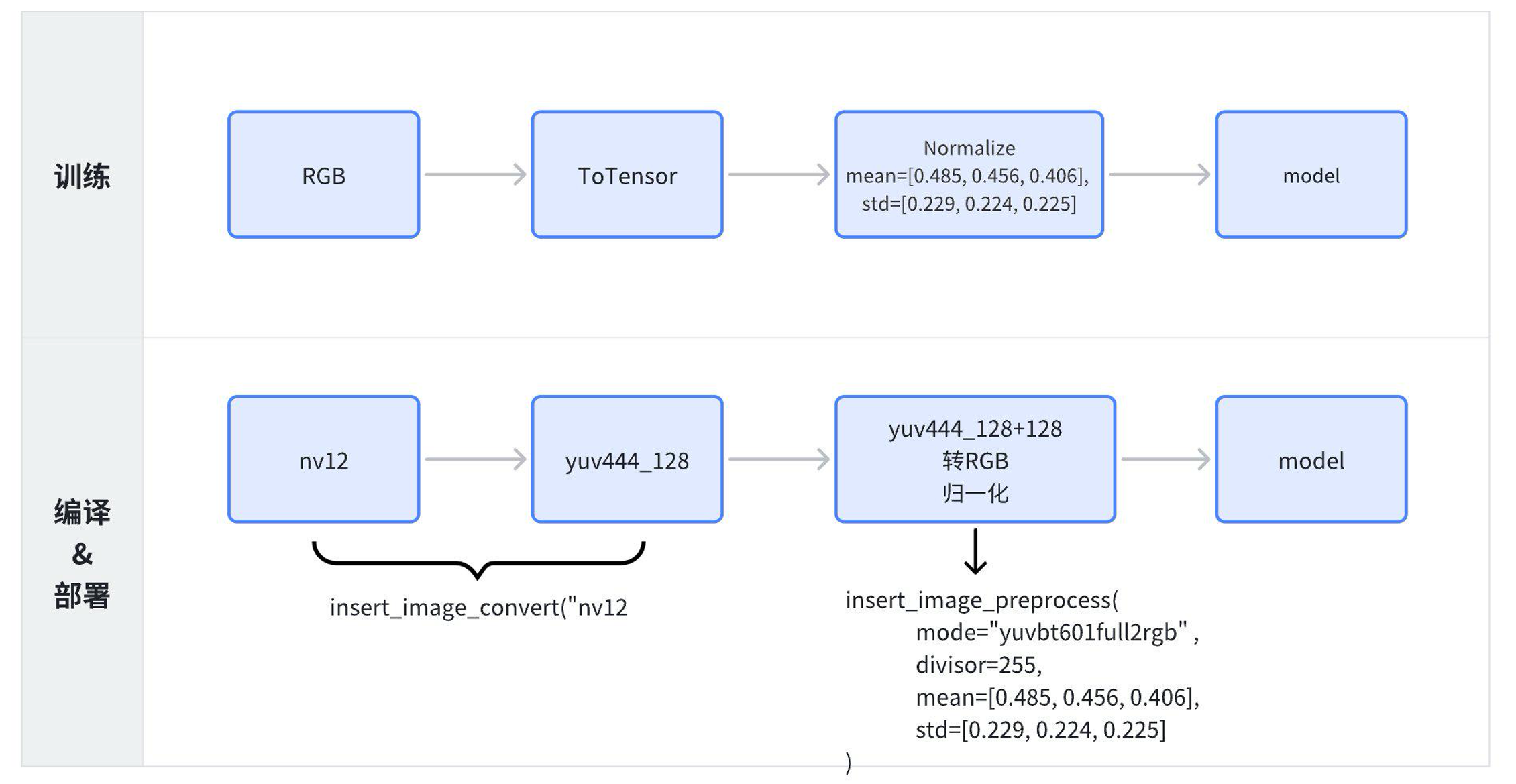
- mode,可选值包含:
- "yuvbt601full2rgb" YUVBT601Full 转 RGB (默认)
- "yuvbt601full2bgr" YUVBT601Full 转 BGR
- "yuvbt601video2rgb" YUVBT601Video 转 RGB 模式
- "yuvbt601video2bgr" YUVBT601Video 转 BGR 模式
- "bgr2rgb" BGR转RGB
- "rgb2bgr" RGB 转 BGR
- "skip" 不进行图像格式的转换,仅进行 preprocess 处理
- 数据转换除数divisor,int 类型,默认为 255
- 均值mean,double 类型,长度与输入c方向对齐,默认为 [0.485, 0.456, 0.406]
- 标准差值std,double 类型,长度与输入c方向对齐,默认为 [0.229, 0.224, 0.225]
迁移注意事项:
插入前处理节点后输入数据处理流程如下:
部署输入数据 -> 色彩转换 -> 数据格式转换 (int 转 float, 即除 divisor) -> 减均值 mean -> 除标准差 std -> 输出(数据类型为 float)-> 量化 ->model
2.3.4 调整输入输出数据排布
迁移注意事项:
插 transpose 节点建议在 convert 之前完成;
请注意正确配置 transpose 的维度变换顺序,例如:
- 模型输入:NHWC —> transpose[0,3,1,2] —> NCHW —> model
- 模型输入:NCHW —> transpose[0,2,3,1] —> NHWC —> model
- 模型输出:model —> NCHW —> transpose[0,2,3,1] —> NHWC
2.3.5 算子删除
该操作需要在 convert 后完成,因为 convert 前模型都还是浮点输入输出,没有生成量化反量化节点:
若进行了删除动作,需要在后处理中根据业务需要进行功能补全,例如实现量化、反量化的逻辑。
OE3.0.31版本支持使用VPU推理量化反量化,只需在conver时启用vpu即可
量化计算参考代码:
Tips1:
当前qat链路的op.name较为冗长,难以通过remove_io_op(op_names=[])来删除指定节点,可暂时采用下面的临时方案删除与某输入/输出节点直接相连的节点:
Tips2:
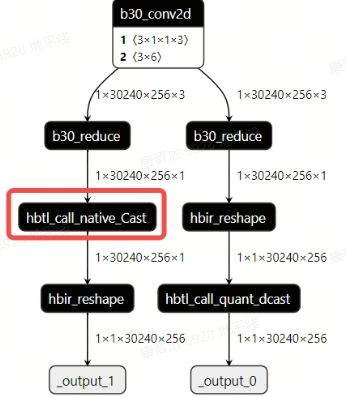
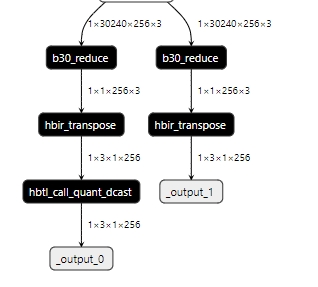
当前argmax节点的输出结构由于reshape在cast之后(如下图所示),因此无法直接通过remove_io_op删除cast,建议用户依据执行argmax操作维度的尺寸,在torch模型中将输出的index cast到对应数据类型再导出onnx/.bc,则convert后argmax将直接以对应精度输出,不会存在cast节点。示例:
对dim=2求max,index最大值为30239(超出int8表示范围了),则尾部插入cast转int16
qat.bc模型结构
convert后的模型结构:

2.4 性能测试及调优
使用hb_compile工具编译模型会默认生成静态性能评估文件(.html & .json)。若需要自行评测某模型的性能,具体可参考后文介绍:
2.4.1 静态性能评测
2.4.2 动态性能评测
ps:为了提高用户评测效率,工具内部自动依据模型输入大小计算了最小stride
2.4.2.1 Pyramid输入
stride计算方式(W32对齐):
perf命令(Pyramid输入的模型其stride为动态,可以不用指定,工具会自动计算):
假设模型输入尺寸为Y=(1,224,224,1),UV=(1,112,112,2,)
2.4.2.2 Resizer输入
perf命令:
假设希望评测的是原图尺寸为HxW=300x300,ROI=(0,0,200,200)下的性能数据,则perf命令如下所示(valid_shape和stride可以不用指定,工具会自动计算)::
roi.txt(使用空格隔开:left top right bottom):
2.5 精度测试及调优
2.5.1 PTQ
2.5.2 QAT

在J6计算平台上,若使用新的prepare接口,默认会调用check_qat_model,在prepare之后会生成model_check_result.txt文件。
- 通过model_check_result.txt检查模型qconfig配置是否正确、是否有未融合的结构以及对精度不友好的共享模块。
验证全 int16 精度调优,确认模型的精度上限,排查工具使用问题和量化不友好模块。若int16不达标,则建议先观察模型中每层的数据分布范围,若的确存在数值范围超出int16的计算,则代表该模型可能需要引入部分fp16的计算(若能通过优化算法将数值范围控制在更小的区间,则对性能和精度都会更加友好)。
使用debug工具分析节点敏感度,依据敏感度配置模型中需要使用int16的比例。
需要注意的是,J5计算平台的定点模型是torch module/torch script格式,而J6计算平台则是hbir格式(*.bc),推理hbir和.hbm的代码如下所示:
2.5.2.1 pyramid输入
2.5.2.2 resizer输入
2.6 工具
工具名称 | J6 | J5 |
hb_perf | 无。只提供python api : | 静态性能分析工具 |
hb_pack | 暂无。 | 打包*.bin |
hb_model_info
| 查看*.hbm和*.bc编译时的依赖及参数信息、*.onnx模型基本信息,查询*.bc可删除节点。可视化通过添加-v参数即可(hbir和hbm都支持) | 查看*.bin编译时的依赖及参数信息
|
hb_verifier
| 支持onnx模型之间、onnx模型与hbir模型之间以及hbir与hbm之间的一致性对比。具体使用说明请参考用户手册-训练后量化(PTQ)-PTQ转换工具-hb_verifier工具 章节内容 | 使用方式见社区文章第1.3.2节:https://developer.horizon.cc/forumDetail/71036815603174578 |
hb_model_modifier
| 无。 节点删除功能的yaml配置方式与J5一致(递归删除),也可参考前文2.3.5节修改.bc模型 | 支持通过name和type按特定顺序删除节点
|
hb_custom_op | 无,功能合入hb_config_generator | 生成含有自定义OP模板的python文件 |
hb_eval_preprocess | 使用方式同J5 | 用于生成ai_benchmark板端推理需要的输入数据 |
hb_config_generator
| J6新增,生成最简yaml或者全量yaml模版。 生成自定义OP模板的python文件 | 无 |
vec_diff | 无 | 使用较少,通常通过yaml文件中的output_nodes截断模型来定位一致性问题 |
2.7 应用开发
由于J6系列计算平台通用性提高,因此为了适应更广泛的模型推理,参考python对数据的定义方式:
提供整数(int)、浮点数(float)、布尔值(bool)等基础数据类型的支持,移除部分特殊数据类型:
类型 | 变更内容 | 变更说明 |
hbDNNDataType | 移除枚举类型: HB_DNN_IMG_TYPE_Y HB_DNN_IMG_TYPE_NV12 HB_DNN_IMG_TYPE_NV12_SEPARATE HB_DNN_IMG_TYPE_YUV444 HB_DNN_IMG_TYPE_RGB HB_DNN_IMG_TYPE_BGR | pym/resizer输入都作为普通 tensor,不再区分图像类型
|
通过stride(步长)来定义内存中元素之间的存储间隔(用户通过该参数可创建非连续的数据存储方式,例如实现图像输入在内存中以二维形态存储,并通过stride参数来完成添加/移除padding的相关操作)。不再提供“layout”信息。
通过valid_shape来获取tensor的维度和每个维度有效数据的大小。
用户通过stride和valid_shape信息来计算对齐后的每个维度的大小,不再提供aligned_shape信息。
即hbDNNTensorProperties结构体做出如下调整
类型 | 变更内容 | 变更说明 |
hbDNNTensorProperties
| 移除枚举字段alignedShape | 属性和stride重叠 |
移除枚举字段tensorLayout | 模型不再感知layout,完全由用户自己决定,此字段废弃 | |
移除枚举字段shift | 无该量化方式 | |
字段类型调整 alignedByteSize int32_t -> int64_t stride int32_t -> int64_t | 考虑到大模型的引入,int32_t已经没办法表示完整的值域大小,因此扩展到int64_t |
每个Tensor仅对应一个内存地址:
类型 | 变更内容 | 变更说明 |
hbDNNTensor
| 字段调整 sysMem[4] -> sysMem | 以往这个数组是为了支持nv12输入的,最新的接口已经不支持这种类型输入,因此不需要数组类型 |
2.7.1 图像输入(重要)
2.7.2 非图像输入
推荐使用UCP新的推理接口,该接口可用于灵活创建同步/异步的推理任务,并通过连续创建任务的方式实现批量推理,只返回一次中断的推理方式:

再配合任务提交接口即可完成模型推理任务。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)