
小鹏汽车自动驾驶产品高级总监袁婷婷老师,最近在微博发表了2篇涉及激光雷达应用的文章,在业内引起了广泛的讨论,本文也做一些探讨。

2025年5月8日,发表《小鹏的物理世界基座大模型,和行业现有的自动驾驶模型有什么区别?》:
原文:https://weibo.com/ttarticle/p/show?id=2309405164053256339668
2025年5月16日,发表《关于模型参数、蒸馏、模态和激光雷达》:

原文:https://weibo.com/ttarticle/p/show?id=2309405166942834262152
01
主要观点
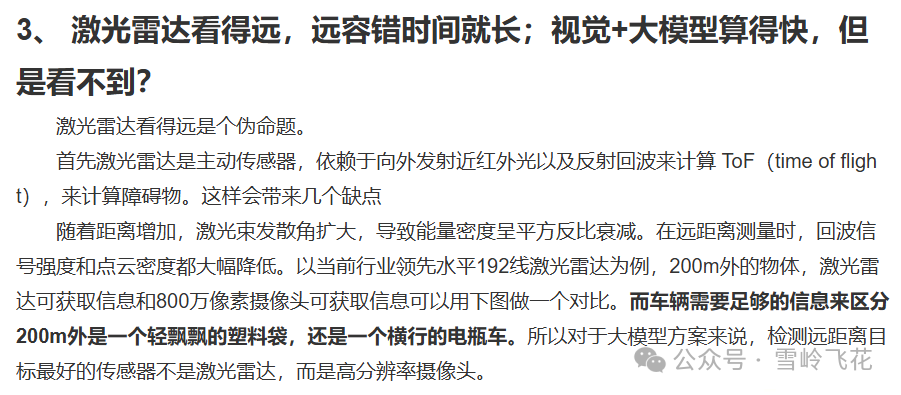
在袁婷婷老师的原文中,和激光雷达相关的观点截图如下:
图片来源:https://weibo.com/ttarticle/p/show?id=2309405166942834262152
图片来源:https://weibo.com/ttarticle/p/show?id=2309405166942834262152
图片来源:https://weibo.com/ttarticle/p/show?id=2309405164053256339668
02
讨论的前提
先明确一下讨论的前提:
我们讨论的是,我们需不需要在自动驾驶系统中仅使用视觉,不使用除了视觉之外其他任何感知单元,就可以保证系统足够的安全和性能。
其实这个逻辑很简单:
对于视觉的弱势场景,业内早已讨论过很多。
没有传感器是绝对完美的,每种传感器都有其优势场景和弱势场景。多传感器融合的策略,能够最大化的弥补各自劣势,减少Corner Case,提升自动驾驶的整体安全性。
03
浅析
下面就袁婷婷老师的一些观点做一些粗浅的分析,个人观点,未必准确,供大家参考。
1)激光雷达分辨率低
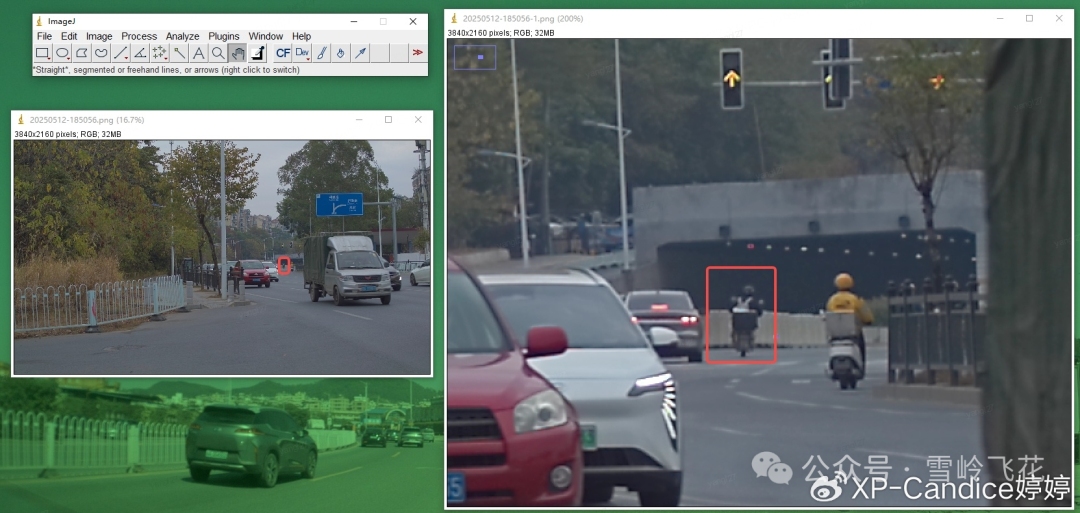
袁婷婷老师观点:激光雷达在远距离的分辨力远低于高像素摄像头(例如800万),检测远距离目标最好的传感器不是激光雷达,而是高分辨率摄像头。
雪岭浅见:
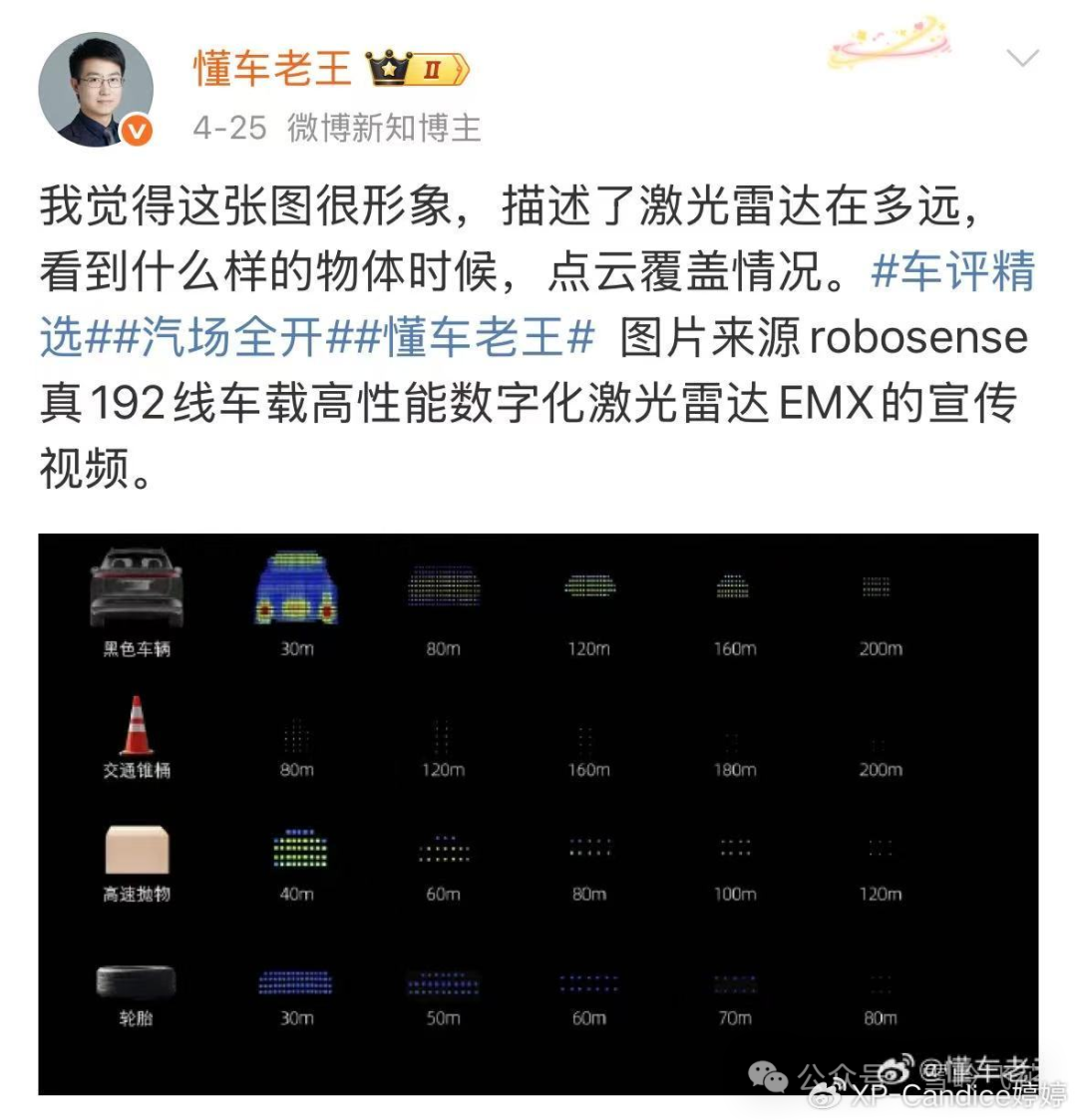
没错,激光雷达的分辨率远低于摄像头,目前市面主流激光雷达的分辨率如下:
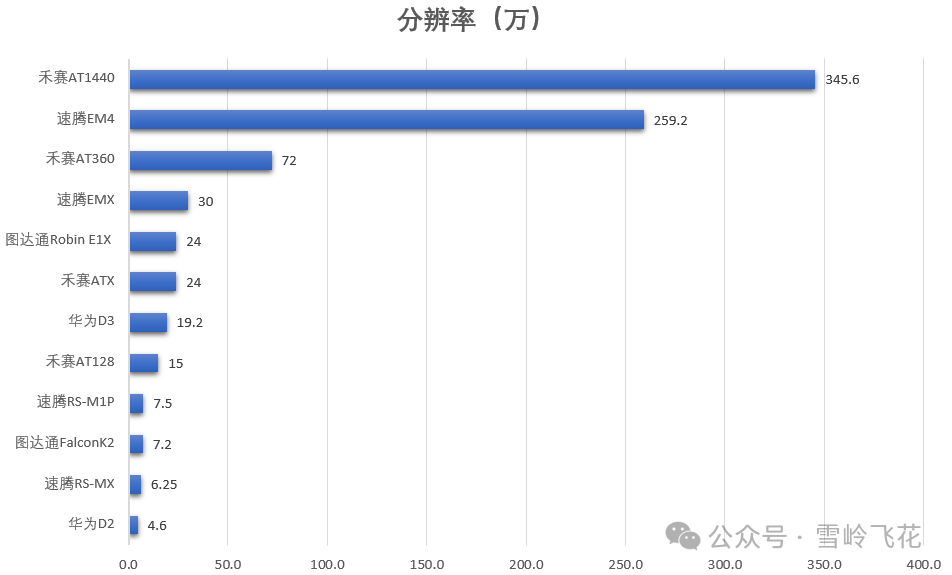
激光雷达不仅分辨率低于摄像头,并且还没有RGB信息,只有深度信息(FMCW激光雷达还有速度信息)。
激光雷达和摄像头的测量原理和感知器件差别巨大,目标识别和分类本来就是摄像头的长处,所以这类任务当然就应该主要采用摄像头来做,而不是激光雷达,这不是激光雷达的优势场景。
2)激光雷达有多径效应
袁婷婷老师观点:激光雷达存在多径效应,会有误报或者漏报。
雪岭浅见:
没有传感器是完美的,任何传感器都有误识别和漏识别,摄像头同样也有其弱势场景,例如将电线杆识别为行人,无法区分前景和背景等等。

3)激光雷达帧率低
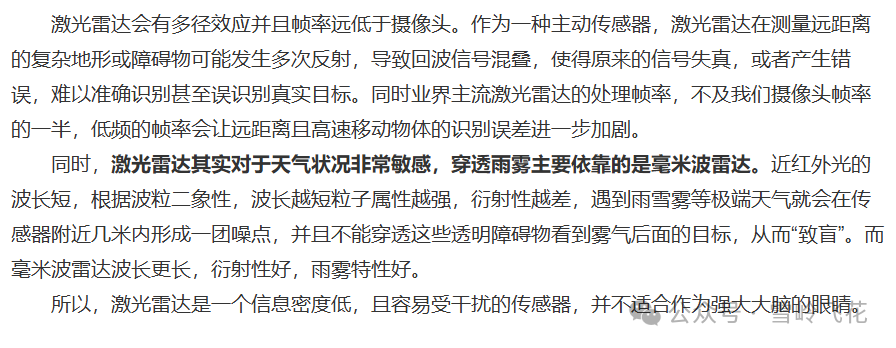
袁婷婷老师观点:激光雷达的帧率低,低帧率会让远距离且高速移动物体的识别误差进一步加剧。
雪岭浅见:
10Hz的更新频率在绝大多数的场景已经足够,并且已经有激光雷达可以做到20Hz,未来Flash激光雷达的帧率会进一步提升,帧率和视觉区别不会不大。
4)激光雷达帧率低
袁婷婷老师观点:激光雷达对于天气状况非常敏感,穿透雨雾主要依靠的是毫米波雷达。
雪岭浅见:
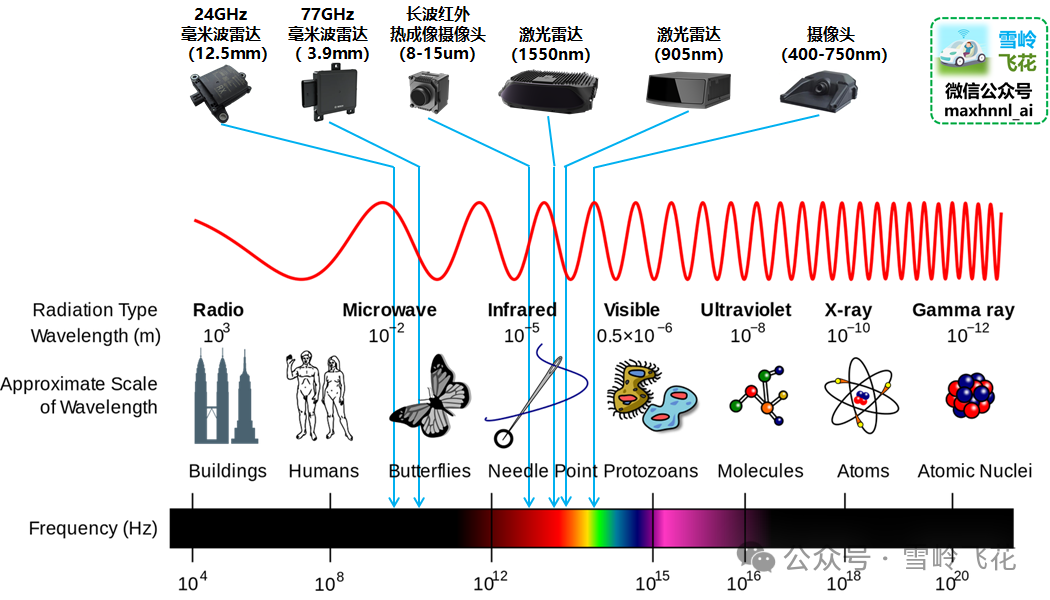
没错。激光雷达、毫米波雷达、摄像头所使用的波长不同,示意图如下:
图片来源:网络,后处理:雪岭飞花
每种传感器检测原理不同,检测特性有很大的区别,有各自的优势和弱势场景:
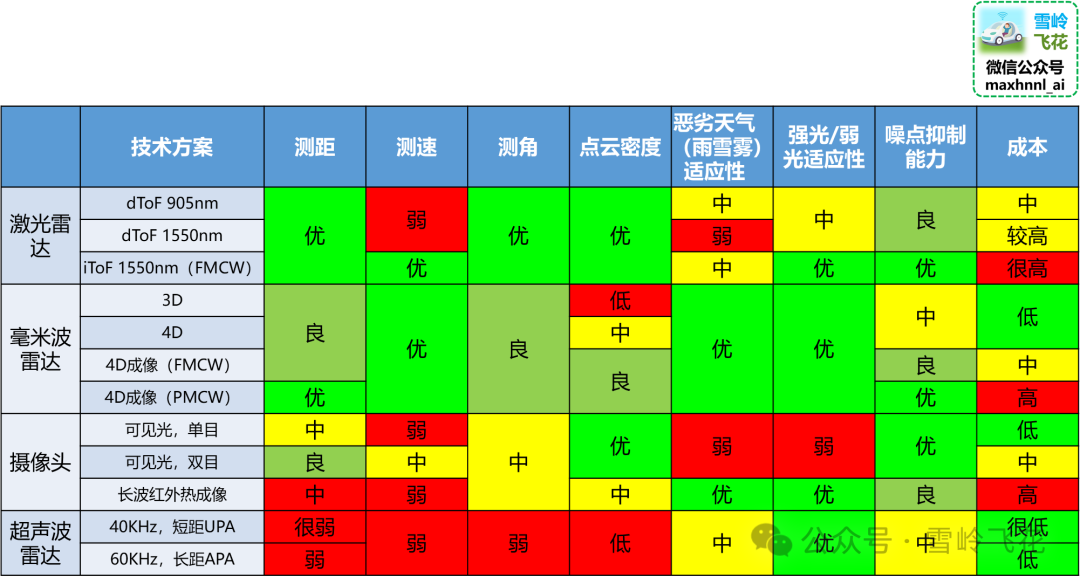
对天气适应性最好的是毫米波雷达,因此正是因为这一点,才需要多传感器融合,用于相互弥补其他传感器的不足。
5)激光雷达占用感知算力
雪岭浅见:
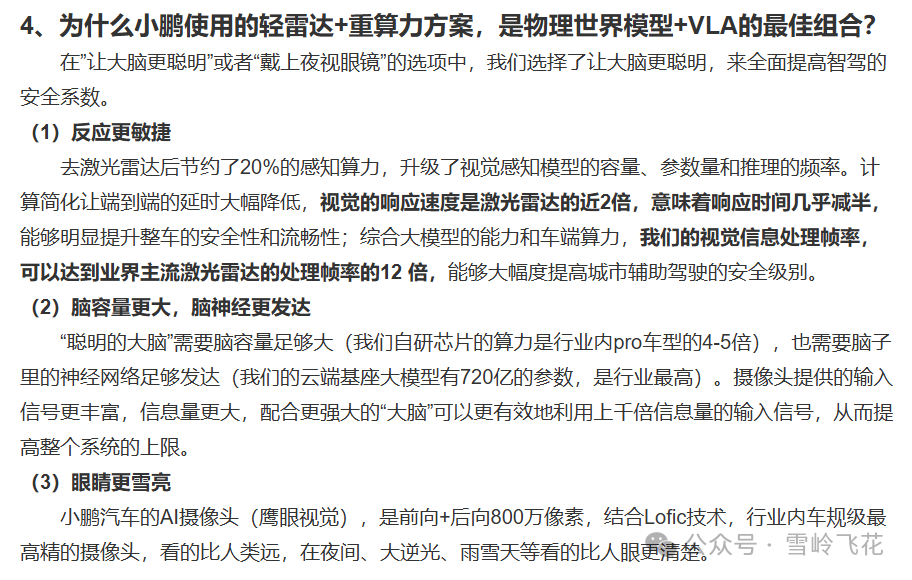
还是之前的信息,视觉处理帧率高于激光雷达,这个没问题,帧率越高当然应对能力越好。
问题的关键还是,去掉激光雷达之后,视觉在感知层的弱项将很难被完全弥补,甚至可能需要视觉花费更多的额外算法(有些硬件缺陷无法通过软件来弥补)。
另外,随着端到端架构的深入,所有感知信息会直接送到大模型做编码,算力的开销未来主要来自于大模型本身,因此,增加激光雷达带来的额外感知算力将非常有限。
6)小鹏AI摄像头性能更强
袁婷婷老师观点:小鹏汽车的AI摄像头(鹰眼视觉),结合Lofic技术,看的比人类远,在夜间、大逆光、雨雪天等看的比人眼更清楚。
雪岭浅见:
LOFIC在消费类电子上早有应用,该技术工艺复杂、面积大、成本高,而且从手机(荣耀Magic6至臻版)的商用结果来看,并没有展现出如官方宣传般的动态范围提升效果。
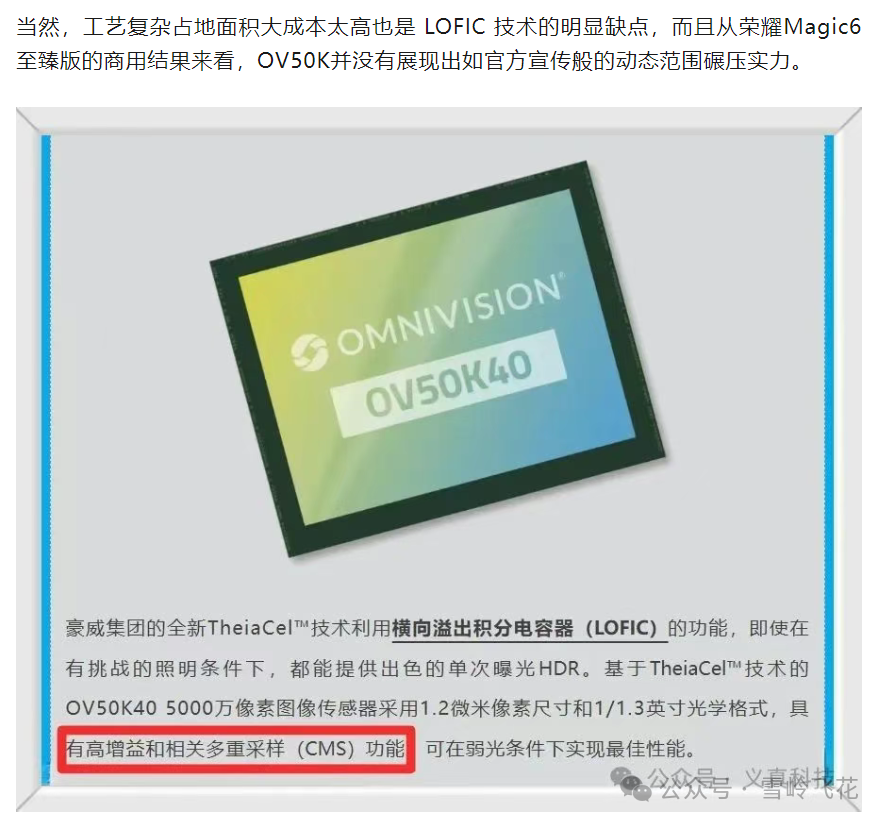
图片来源:义真科技《一文看懂索尼、三星和豪威的各种单曝光HDR技术》https://mp.weixin.qq.com/s/2jxKnscFzDi6YwWZ6xwMFg
当然非常期待该技术在汽车上的应用,如果确实被证明有效,笔者相信肯定会有更多厂家采用。
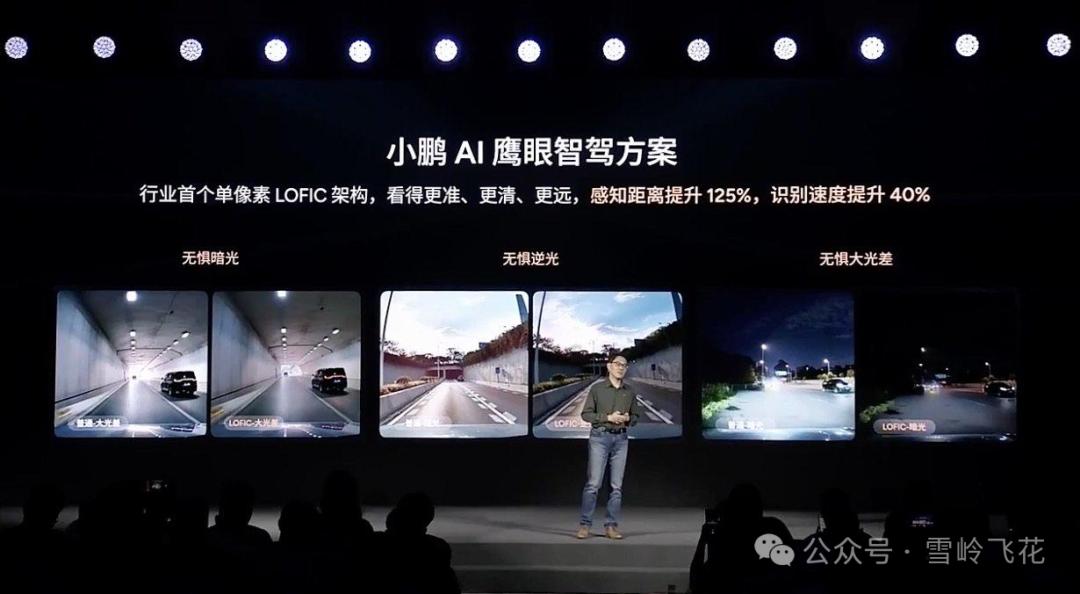
图片来源:小鹏汽车
04
结语
禾赛曾说激光雷达的功能就像是“隐形气囊”:

笔者觉得这个比喻对于激光雷达的价值没有完全展现。
安全气囊是被动安全件,是在事故已经发生了之后,保护驾乘人员安全的最后屏障。而激光雷达更应该是一个“主动安全件”,其目的不是为了事故发生后保护驾乘人员,而是从一开始就避免事故本身的发生。
还是引用理想的观点,安全是包括特斯拉在内所有汽车行业从业者的一致追求。

小鹏也并非“纯视觉”方案,在小鹏的感知系统中还有3颗毫米波雷达和12颗超声波雷达。可以看出,小鹏对于安全也同样非常重视,肯定有自己独特的思考和实践。
最后非常期待,对于安全性要求更高的L3和L4系统,小鹏会使用激光雷达吗?
文章转载自公众号:雪岭飞花
原文链接:https://mp.weixin.qq.com/s/4sw40nJVfTeh00IW_Ar1LA

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
