
01 为什么需要相机标定?
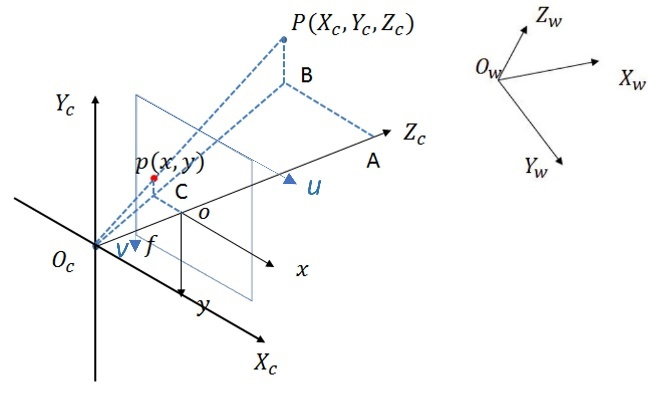
在图像测量和机器视觉领域,相机标定是无法绕开的基础环节。标定的核心目标是建立三维真实世界与二维图像平面之间的数学映射关系,获取相机的几何成像参数。接下来,我们从成像机制出发,逐步剖析标定的必要性和常用方法。相机如何完成成像?相机成像本质上是一个光学-电子转换流程:光线穿过镜头(可视为凸透镜),在感光芯片(CCD或CMOS)上形成投影,芯片将光信号转为电信号,再通过DSP芯片处理成数字图像并保存。这个过程涉及四个关键坐标系:
世界坐标系
用户自定义的三维空间基准,用于描述物体和相机在现实环境中的位置关系,原点位置可灵活选取。
世界坐标系
用户自定义的三维空间基准,用于描述物体和相机在现实环境中的位置关系,原点位置可灵活选取。
相机坐标系
以镜头光心为原点,z轴沿光轴方向,x和y轴与成像平面边缘平行。
以镜头光心为原点,z轴沿光轴方向,x和y轴与成像平面边缘平行。
图像坐标系
与成像平面重合,原点位于光轴与成像平面的交点(图像中心),坐标轴方向与成像平面边缘平行。
与成像平面重合,原点位于光轴与成像平面的交点(图像中心),坐标轴方向与成像平面边缘平行。
像素坐标系
同样位于成像平面,但原点设在图像左上角,坐标轴与图像坐标系方向一致。
举例说明:
假设真实空间中的点Pw(Xw, Yw, Zw),在相机坐标系中记为Pc(Xc, Yc, Zc),投影到图像坐标系后为P(X, Y),最终在像素坐标系中显示为P(U, V)。
为简化推导,我们将成像平面与物体置于光心同侧:
同样位于成像平面,但原点设在图像左上角,坐标轴与图像坐标系方向一致。
举例说明:
假设真实空间中的点Pw(Xw, Yw, Zw),在相机坐标系中记为Pc(Xc, Yc, Zc),投影到图像坐标系后为P(X, Y),最终在像素坐标系中显示为P(U, V)。
为简化推导,我们将成像平面与物体置于光心同侧:
02 用数学语言拆解相机成像
相机成像过程可以理解为坐标系间的三次变换。在理想情况下(不考虑畸变),变换过程如图:
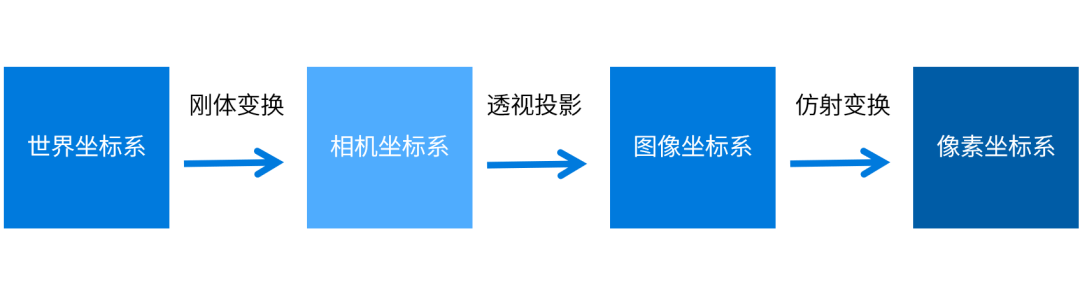
在不考虑镜头畸变的理想情况下,相机成像可分解为三步坐标变换:
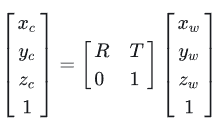
首先,世界坐标系→相机坐标系
这是一个刚体变换(不改变物体形状),通过旋转矩阵R和平移向量T实现:
在不考虑镜头畸变的理想情况下,相机成像可分解为三步坐标变换:
首先,世界坐标系→相机坐标系
这是一个刚体变换(不改变物体形状),通过旋转矩阵R和平移向量T实现:
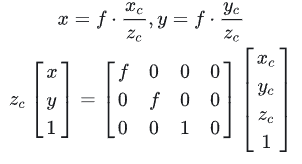
然后,相机坐标系→图像坐标系
这一步遵循透视投影原理(近大远小):
这一步遵循透视投影原理(近大远小):
最后,图像坐标系→像素坐标系
像素坐标系的单位为pixel,其中U0,V0为成像平面中心点在像素坐标系的坐标,dx和dy分别在像素坐标系下,x轴和y轴方向上每个像素的物理尺寸。
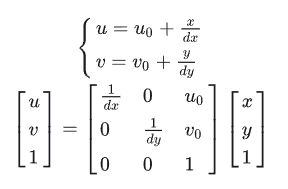
像素坐标系的单位为pixel,其中U0,V0为成像平面中心点在像素坐标系的坐标,dx和dy分别在像素坐标系下,x轴和y轴方向上每个像素的物理尺寸。
综合公式,我们就可以直接得到,从世界坐标系到像素坐标系的转换关系式:
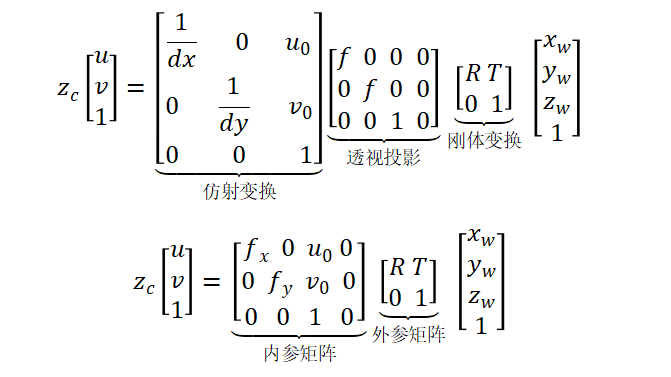
其中,
内参矩阵:由相机固有属性决定(焦距、像素尺寸、主点位置等)
外参矩阵:由相机与世界坐标系的相对姿态决定(旋转R和平移T)
外参矩阵:由相机与世界坐标系的相对姿态决定(旋转R和平移T)
相机标定的任务就是求解这两组参数,从而建立精确的空间-图像映射模型。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)