
前言
2025 年 2 月,国家标准 GB/T 45312-2025《智能网联汽车 自动驾驶系统设计 运行条件》正式实施,首次以国标形式明确了 ODC(设计运行条件)的定义与框架。这一标准的落地,填补了此前国际主流 ODD(设计运行范围)定义的短板,为自动驾驶系统的设计、开发、测试及用户使用建立了统一标尺。当前自动驾驶的一些悲剧仍在敲响安全警钟,ODC 的明确不仅是技术层面的规范,更是守护道路安全的核心防线。
01
从ODD到ODC:
在自动驾驶发展初期,ODD(设计运行范围)是界定系统适用场景的核心概念,但国际主流定义始终存在局限性。随着技术落地加速,单一 ODD 已难以覆盖复杂的运行条件,GB/T 45312-2025 提出的 ODC 概念,实现了从 “外部环境” 到 “全维度条件” 的关键升级。
1. 国际主流 ODD 定义及核心短板
目前全球公认的 ODD 定义主要围绕三大权威框架,但均存在明显局限:
2. 国标 ODC:全维度覆盖的定义革新
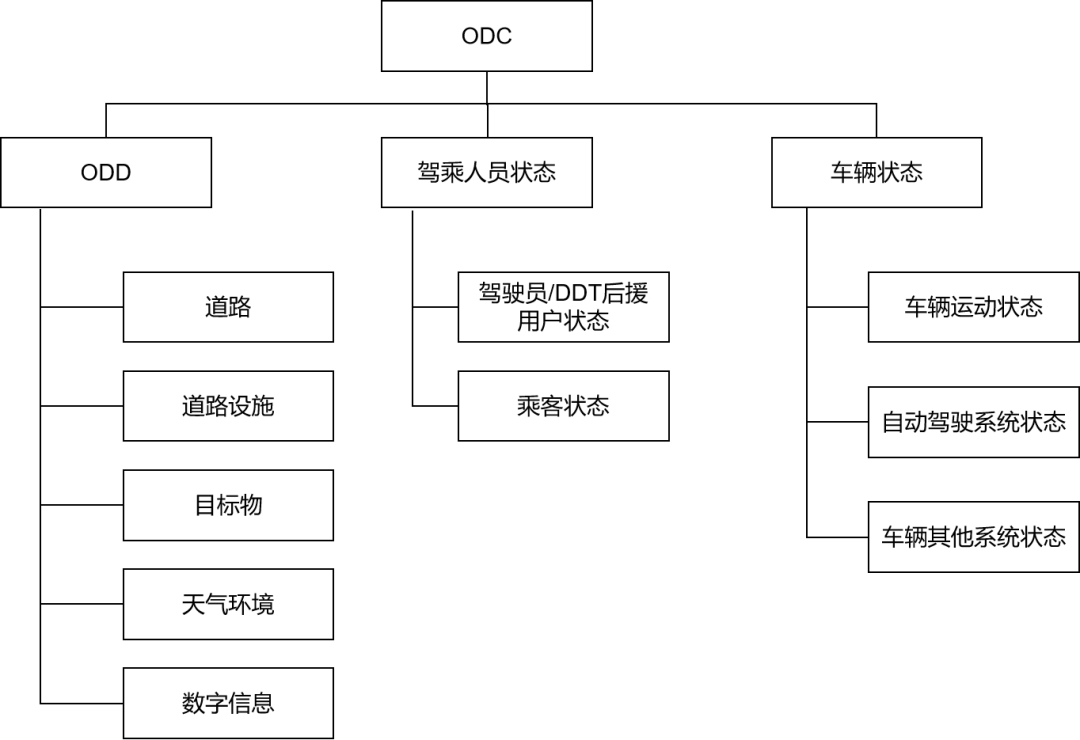
GB/T 45312-2025 首次明确:ODC 是 “自动驾驶系统设计时确定的适用于其功能运行的各类条件的总称,包括设计运行范围(ODD)、车辆状态、驾乘人员状态及其他必要条件”。这一定义实现了三大突破:
02
ODC的核心价值:
GB/T 45312-2025 明确指出,ODC 是自动驾驶系统全生命周期的核心依据。其定义的清晰程度,直接决定了系统的功能边界、性能指标与安全底线。
1. 锚定技术路线:避免研发 “无的放矢”
ODC 直接主导传感器选型、算法设计与硬件配置的方向。例如若 ODC 明确 “支持夜间暴雨天气的高速场景”,系统需配备夜视激光雷达与高动态范围摄像头,算法需强化湿滑路面摩擦系数预测;若 ODC 限定 “仅适用于白天城市快速路”,则可采用 “视觉 + 毫米波雷达” 的低成本方案。
某车企曾因初期未明确 ODC,在城市道路系统中沿用高速场景的传感器配置,导致系统在路口施工区域频繁误判,最终不得不重新调整 ODC 并更换硬件,研发成本增加 40%。这印证了行业共识:“ODC 定义清楚,系统 80% 的设计方向就已确定”。
2. 明确测试标准:构建安全验证闭环
ODC 是测试与验证的核心依据。根据 GB/T 45312-2025 附录 A 的示例,高速公路场景的 ODC 需明确 “允许曲率半径≥150m 的弯道”“不允许无标线道路”,测试团队可据此生成针对性场景用例。
结合《智能网联汽车组合驾驶辅助系统安全要求》(征求意见稿),ODC 相关测试需覆盖 “车速边界、天气边界、驾驶员状态边界” 等多维度,例如雨天场景需验证 1-4 级雨量下的系统响应,确保 ODC 界定的每一个条件都经过实测验证。这种 “定义 - 测试 - 优化” 的闭环,让系统安全可追溯、可复现。
3. 厘清责任边界:破解事故问责难题
在自动驾驶事故认定中,ODC 是界定车企与用户责任的关键标尺。GB/T 45312-2025 要求,ODC 元素需明确 “不允许” 条件的处理策略,例如 “匝道会抑制 ADS 激活并导致退出”。若事故发生在 ODC 允许范围内且系统存在缺陷,车企需承担主要责任;若用户在 ODC 禁止场景(如无标线乡村道路)强行使用系统,则责任主体转向用户。
2023 年某品牌辅助驾驶事故中,系统 ODC 明确标注 “仅适用于有清晰标线的道路”,而事故发生在施工占道的无标线路段,最终认定用户违规使用系统,这正是 ODC 在责任界定中的核心作用。
03
对用户而言:
对普通用户来说,ODC 不是晦涩的技术术语,而是明确的 “使用说明书”。但现实中,用户对系统边界的认知缺失,已成为安全事故的主要诱因。
1. 案例警示:超出 ODC 的 “致命误用”
例如某车高速碰撞燃烧事故的核心原因,正是用户对系统 ODC 边界认知不清。涉事车辆的辅助驾驶系统 ODC 明确限定 “仅适用于有清晰车道线的高速及快速路,且无法识别静止障碍物”,但用户在遇到前方静止工程车时,过度依赖系统的 “自动避险功能”,未及时接管,最终导致事故。
调查显示,超 60% 的用户不清楚车辆辅助驾驶系统的 ODC 范围,35% 的用户认为 “开启辅助驾驶后可无需关注路况”。这一认知偏差背后,既有用户对技术的过度信任,也有车企对 ODC 信息传递的不足 —— 部分车企宣传中强调 “智能驾驶” 的便捷性,却对 “不允许无标线道路”“不允许极端天气” 等 ODC 限制一笔带过。
2. ODC 认知的三重安全价值
清晰理解 ODC,能为用户带来三重安全保障:
3. 国标要求:车企需让用户 “看懂” ODC
根据《组合驾驶辅助系统安全要求》(征求意见稿),车企需通过车载终端、官方文档等公开方式,向用户明确 ODC 边界,包括 “道路类型、天气条件、驾驶员状态要求” 等。理想的传递方式应是可视化图表,例如用 “一张图” 标注 “允许场景:高速 / 快速路”“禁止场景:乡村道路 / 施工区域”,并在系统接近 ODC 边界时,通过语音、方向盘震动等多维度提醒。
04
ODC的测试与验证:
ODC 的落地离不开严格的测试验证。结合 GB/T 45312-2025 与组合驾驶辅助系统安全要求,测试需覆盖 “元素验证、边界测试、动态响应” 三大核心维度。

1. 测试核心内容:覆盖 ODC 全要素
ODC 测试需针对 “道路、车辆状态、驾乘人员状态” 三大类基础元素展开:
2. 关键测试方法:静态界定 + 动态响应
3. 测试标准依据:国标明确量化指标
GB/T 45312-2025 给出了明确的量化要求,例如雨量等级 1 级(1h 降雨量 10.0-14.9mm)为允许条件,2 级(15.0-29.9mm)超过 2 分钟则系统退出;《组合驾驶辅助系统安全要求》(征求意见稿)进一步规定,系统需持续探测 ODC 边界,接近边界时发出提示,超出后发出立即控制警告(DCA)并终止辅助功能。这些量化指标,让 ODC 测试从 “定性判断” 转向 “定量验证”。
05
结语:ODC落地,
GB/T 45312-2025 的实施,标志着中国自动驾驶行业从 “技术探索” 迈向 “规范落地”。ODC 作为系统设计的 “总纲”、用户使用的 “指南”、事故问责的 “标尺”,其明确性直接决定自动驾驶的安全底线。
当车企真正将 ODC 作为产品设计的核心前提,当用户真正将 ODC 视为不可逾越的 “安全红线”,自动驾驶才能在技术创新与安全保障之间找到平衡。未来,随着 ODC 测试与验证体系的不断完善,我们有理由相信,自动驾驶将在清晰的边界内,真正实现 “比人类更安全的驾驶”—— 而这,正是国标落地的核心意义所在。
文章转载自公众号:汽车电子与软件
作者:鲁大师
原文链接:https://mp.weixin.qq.com/s/COxfRxFGAvwegRHa8OWrHg

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)