
BEVDet模型代码解析与实现细节
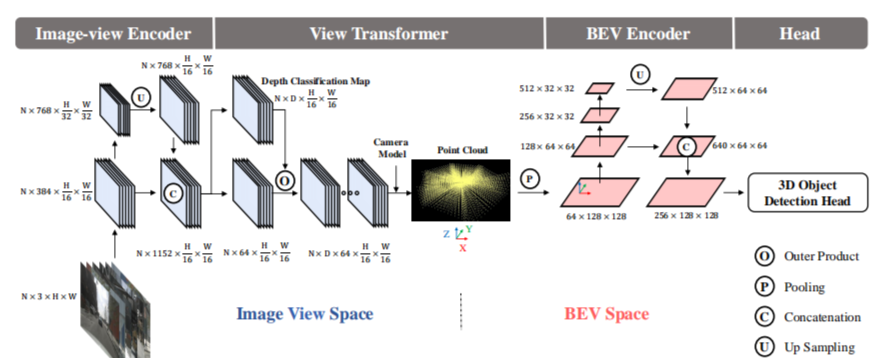
一、模型架构概述BEVDet采用四阶段处理流程完成3D目标检测任务:
Image-view Encoder:对环视相机图像进行特征提取
View Transformer:将图像视角特征转换为鸟瞰图(BEV)特征
BEV Encoder:对BEV特征进行编码增强
Head:完成最终的目标检测
View Transformer:将图像视角特征转换为鸟瞰图(BEV)特征
BEV Encoder:对BEV特征进行编码增强
Head:完成最终的目标检测
该架构通过view transformer生成显式的BEV特征表示,其形式类似于点云特征。为了提升性能,模型采用CUDA加速voxel pooling操作,并在检测头中使用优化的NMS算法。
二、核心代码流程解析:
1.tools/test.py 测试入口
2.mmdet3d/apis/test.py 推理调度
3.mmdet3d/models/detectors/bevdet.py BEVDet主体实现
三、视角转换核心实现
3.1.mmdet3d/models/necks/view_transformer.py
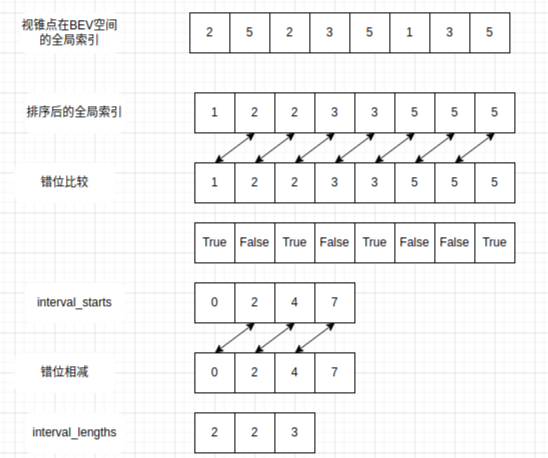
Voxel pooling的关键步骤为voxel_pooling_prepare_v2,为了更好的理解,在代码下方准备了图例来进行理解。
Voxel pooling的关键步骤为voxel_pooling_prepare_v2,为了更好的理解,在代码下方准备了图例来进行理解。
Voxel Pooling 图例
3.2.mmdet3d/ops/bev_pool_v2/src/bev_pool_cuda.cu
总结:
通过对BEVDet的了解,进一步理解了LSS的思想,同时也理解了Voxel Pooling中的各种操作,后续希望能够再深入了解几篇自顶而下的论文,如PETR\PETRv2等。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)