
超声波雷达作为一种基于声波反射原理的非接触式传感设备,凭借其结构简单、成本低廉、对障碍物识别灵敏等优势,在智能驾驶领域得到了广泛应用。本篇文章简单介绍超声波雷达原理、分类、安装、特性及其应用。

工作原理
超声波雷达的核心原理基于超声波的发射、传播与反射特性,通过计算声波往返时间实现距离测量,整体工作流程可分为四个关键步骤:
超声波发射:雷达内部的压电换能器(核心部件)在电信号激励下发生机械振动,产生频率高于20kHz的超声波(人耳无法感知,且传播方向性强、能量集中),并向目标区域定向发射。
声波传播与反射:超声波在介质(空气、液体等,汽车领域主要为空气)中传播,当遇到障碍物时,部分声波会被反射形成回波,剩余声波则被障碍物吸收或穿透。
回波接收:反射回波作用于压电换能器,使其产生机械振动并转化为电信号,完成“声-电”逆转换,雷达控制器对该电信号进行滤波、放大等预处理。
距离与信息计算:根据超声波在介质中的传播速度和发射到接收的时间差(Δt),通过公式 距离(d)= 传播速度(v)× 时间差(Δt)/ 2计算出雷达与障碍物的距离。
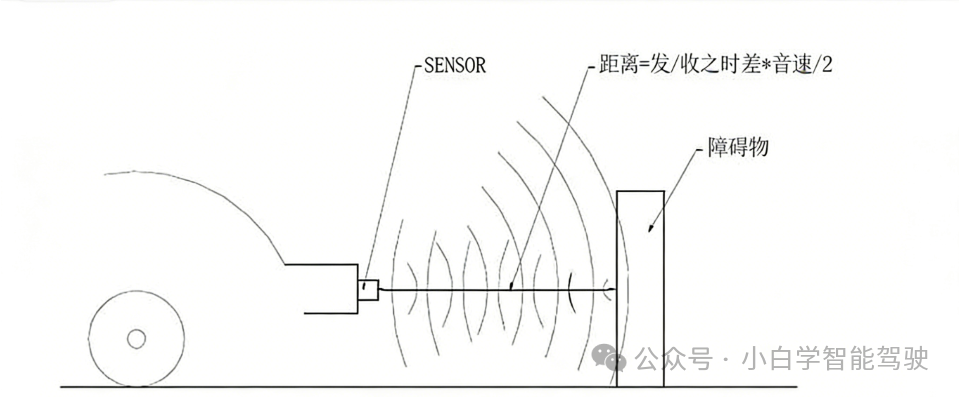
超声波传播速度受介质温度、湿度影响较大,实际应用中需通过温度补偿算法修正误差,确保测量精度。
分类
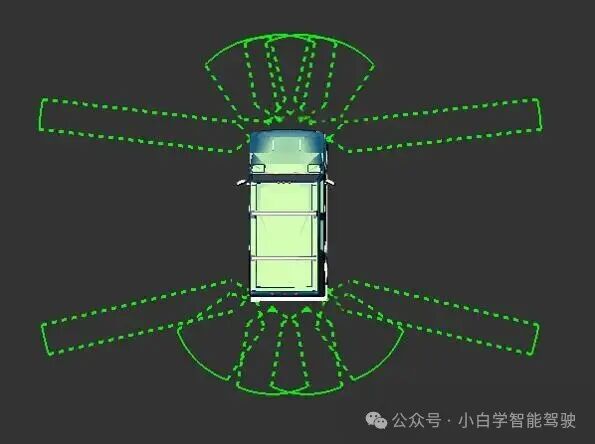
车载超声波雷达按安装位置、功能及探测性能,核心分为两类,业内分别称为UPA和APA,二者探测范围、探测区域有所不同。如下图所示,图中的汽车配备了前后向共8个UPA,左右侧共4个APA。
UPA
UPA即安装在汽车前后保险杠上的超声波雷达,主要用于测量汽车前后方的障碍物。其探测距离一般在15~250cm之间,最大量程为2~2.5米,单个UPA的探测角约120°,通常一辆车会在前后保险杠共安装8个(前后各4个),精准覆盖车辆前后方近距离核心区域。

APA
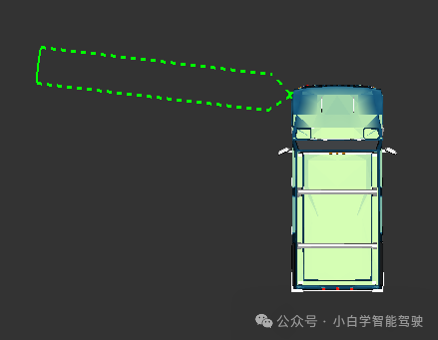
APA是安装在汽车侧面的超声波雷达,核心用于测量侧方障碍物距离,其探测距离一般在30~500cm之间,最大量程至少5米(目前已有超过7m的APA雷达在业内使用),单个APA的探测角约80°。一辆车通常配备4个APA(左右侧各2个),其探测距离优势不仅能检测左右侧障碍物,更能根据返回数据判断停车库位是否存在,是自动泊车功能的核心支撑。
安装要点
超声波雷达的安装质量直接影响探测精度与稳定性,需重点关注安装位置、角度、间距及环境适配:
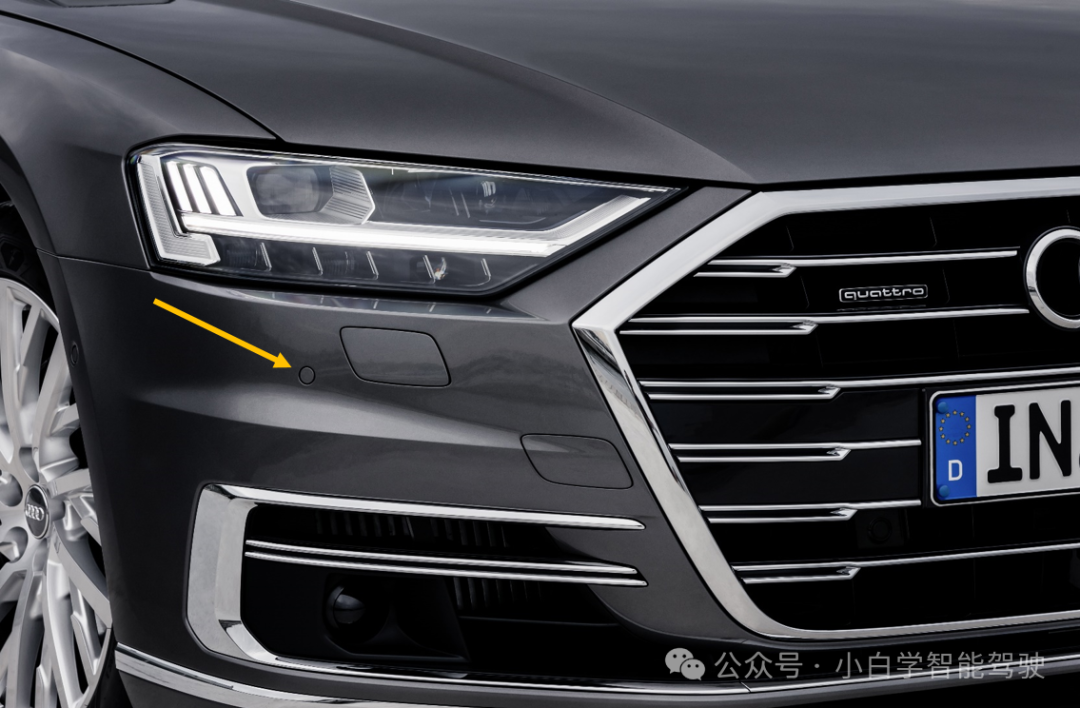
1、UPA安装于前后保险杠,APA安装于车门或翼子板,均采用隐藏式设计——在车上的外观即为保险杠或车身侧面的小圆点(下图黄色箭头标注位置),既不破坏车身美观,又能避免探头磕碰。
安装间距上,后向UPA建议20-30cm均匀分布,覆盖后方120°-150°;前向UPA间距可扩至30-40cm,覆盖前方100°-120°;侧方APA间距根据车身长度调整,重点覆盖侧方盲区。
2、UPA雷达探头需与地面呈5°-10°倾角,既避免地面反射波干扰(减少误报),又能覆盖低矮障碍物(如路沿石)。侧向APA需垂直于车身安装,垂直度误差不超过 ±2°,确保侧方探测范围左右对称,避免单侧盲区过大。
3、探头表面需保持清洁,避免油污、灰尘覆盖影响声波传播;安装处需做好密封处理,防止雨水、泥沙渗入内部电路,导致故障。同时,需避开高温区域(如发动机附近),避免压电换能器性能衰减。
4、安装完成后,需通过专用设备校准雷达的探测角度与距离精度,消除安装误差导致的误报、漏报。部分车型支持自动校准,部分需手动调试,确保雷达与车载控制系统协同工作。
数学模型
尽管UPA和APA在探测距离、探测形状上差异显著,但二者可通过同一套数学模型描述状态。描述一个超声波雷达的状态需四个核心参数,具体信息如下表所示:
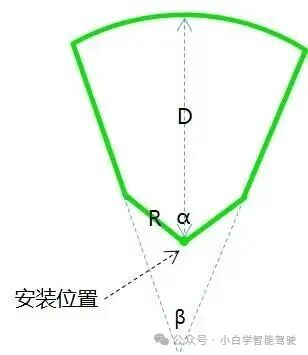
参数名称 | 参数定义 | UPA/APA参数值 |
探测角α | 超声波雷达的有效探测角,决定探测范围宽窄 | UPA约120°;APA约80° |
辅助角度β | 影响雷达检测宽度范围的关键参数,角度通常较小 | UPA约20°;APA为0°(特殊设定) |
基准距离R | 辅助确定雷达检测宽度的重要参数 | UPA与APA差异不大,均约0.6m |
最大量程D | 雷达能准确探测的最远距离(有效量程) | UPA为2~2.5m;APA至少5m,现有型号已超7m |
优势和局限性
优势 | 成本低廉:相较于激光雷达、毫米波雷达,结构简单、核心部件(压电换能器)量产成本低。 |
障碍物识别灵敏:对非金属障碍物(如行人、塑料、布料)反射效果优于毫米波雷达,且能精准识别低矮障碍物(路沿石、台阶),弥补视觉传感器盲区。 | |
不受光线影响:无需依赖光线条件,白天、黑夜、雨天、雾天等复杂天气下均能稳定工作,环境适应性强。 | |
实时响应快:传播速度稳定,往返时间计算简单,响应时间可控制在毫秒级,满足低速场景(泊车、低速防撞)实时检测需求。 | |
局限性 | 温度敏感(核心误差来源):传播速度与温度强相关,近似公式为C = C0 + 0.607 × T(C0=332m/s,T为环境温度℃);同一障碍物在不同温度下测量距离有差异,需通过保守计算或温度修正提升精度。 |
无法精确描述障碍物位置:仅返回探测距离数值,无法区分方位(如A、B两处等距障碍物,单个雷达无法判定具体位置),需多雷达协同弥补。 | |
探测距离有限:受声波衰减影响,有效探测距离通常不超过10m,无法满足高速场景需求,需与其他雷达配合使用。 |
多雷达组合定位
单个超声波雷达测量障碍物时,仅能确定障碍物位于以雷达为圆心、探测距离为半径的圆上(即“距离圆”),无法区分圆上不同方位的点。而多个雷达组合时,通过采集不同位置雷达与障碍物的距离数据,形成多个距离圆,其交点即为障碍物的具体位置,核心分为两步:
双雷达基础定位:在车辆坐标系内(以车头为X轴正方向、车身中线为Y轴),布置两个位置已知的雷达(如前保险杠左侧UPA与右侧UPA)。假设雷达A坐标为(x₁,y₁)、探测距离为d₁,雷达B坐标为(x₂,y₂)、探测距离为d₂,通过求解两个圆的方程((x-x₁)²+(y-y₁)²=d₁²、(x-x₂)²+(y-y₂)²=d₂²),即可初步确定障碍物位置。
多雷达优化定位:实际车载场景中(如8个UPA+4个APA组合),新增雷达可形成更多距离圆,通过多圆交点迭代验证,进一步缩小定位误差。同时,结合最小二乘法对多组距离数据进行拟合优化,可抵消温度、噪声带来的测量偏差,提升定位精度至厘米级,满足自动泊车等场景需求。
应用场景
应用场景 | 功能描述 | 核心作用 |
倒车辅助(PDC) | 车辆倒车时,向驾驶员提示后方障碍物距离 | 实时探测车尾与障碍物的距离,通过蜂鸣或中控屏显示预警,距离越近蜂鸣频率越高 |
自动泊车(APA/RPA) | 系统自动完成车位识别、路径规划与车辆控制 | 1. 扫描车位两侧及后方的障碍物,判断车位尺寸是否符合泊车条件;2. 泊车过程中实时监测车身周围障碍物,修正行驶轨迹;3. 完成泊车后确认车身是否完全入库 |
低速紧急制动(AEB-L) | 车辆低速行驶(≤15km/h)时,识别前方障碍物并自动刹停 | 探测车头与前方障碍物(如行人、石墩、低矮物体)的距离,当距离低于安全阈值时,触发制动信号,避免碰撞 |
超声波雷达作为智能驾驶应用中成本最低的传感器之一,它的价值远未被完全开发——从基础的倒车提醒到高阶的自动泊车、高速辅助,其适配场景仍在持续拓展。
参考:
https://zhuanlan.zhihu.com/p/35177313
文章转载自公众号:小白学智能驾驶
原文链接:https://mp.weixin.qq.com/s/Nb9zHikAHAvvPmBQWLJSyQ

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)