
Sparse4D:从 Dense BEV 到工程可落地的世界建模
引言:当 BEV 走到工程拐点
BEV 在方法论上是正确的,但以 Dense BEV 为核心的实现方式,并不天然适合长期运行在真实系统中。
一、Dense BEV 的隐性前提:世界是均匀而重要的
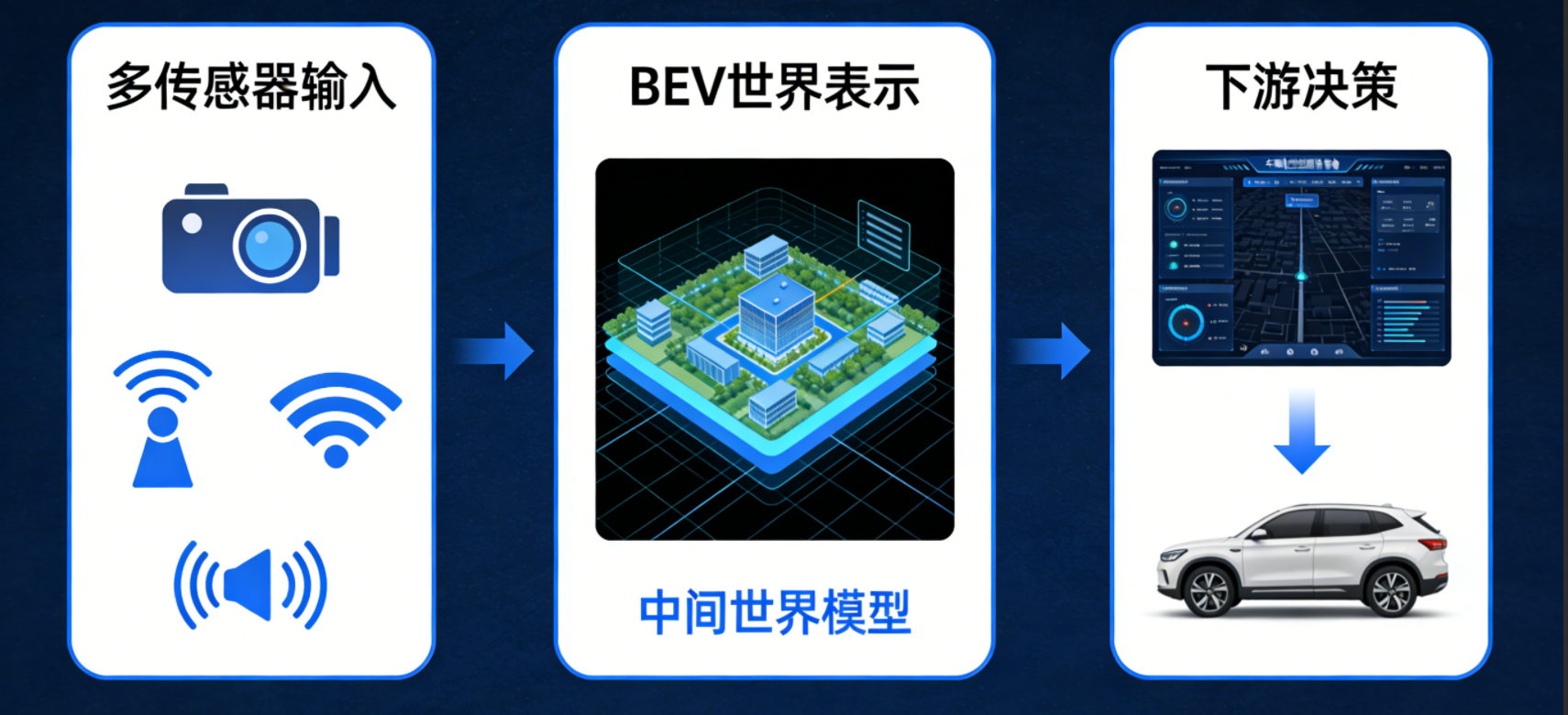
Dense BEV 方法的设计逻辑,本质上继承了经典栅格化建模的思想。整个驾驶场景被划分为规则、均匀的 BEV 网格,每一个空间单元都被视为同等重要的建模对象。无论该区域是否存在交通参与者、是否会影响当前决策,模型都会为其分配计算资源,生成特征并参与后续推理。
这种假设在静态地图构建或环境重建任务中是合理的,因为目标本身就是“完整还原空间”。但在动态驾驶场景中,这一前提开始显得不合时宜。绝大多数时间里,BEV 平面上的大部分区域是空的、不发生变化的,也不直接参与车辆的决策过程。Dense BEV 却仍然要求模型持续、等价地关注这些区域,这使得计算成本和建模负担不可避免地随 BEV 分辨率和时间长度增长。
二、当表示方式成为瓶颈
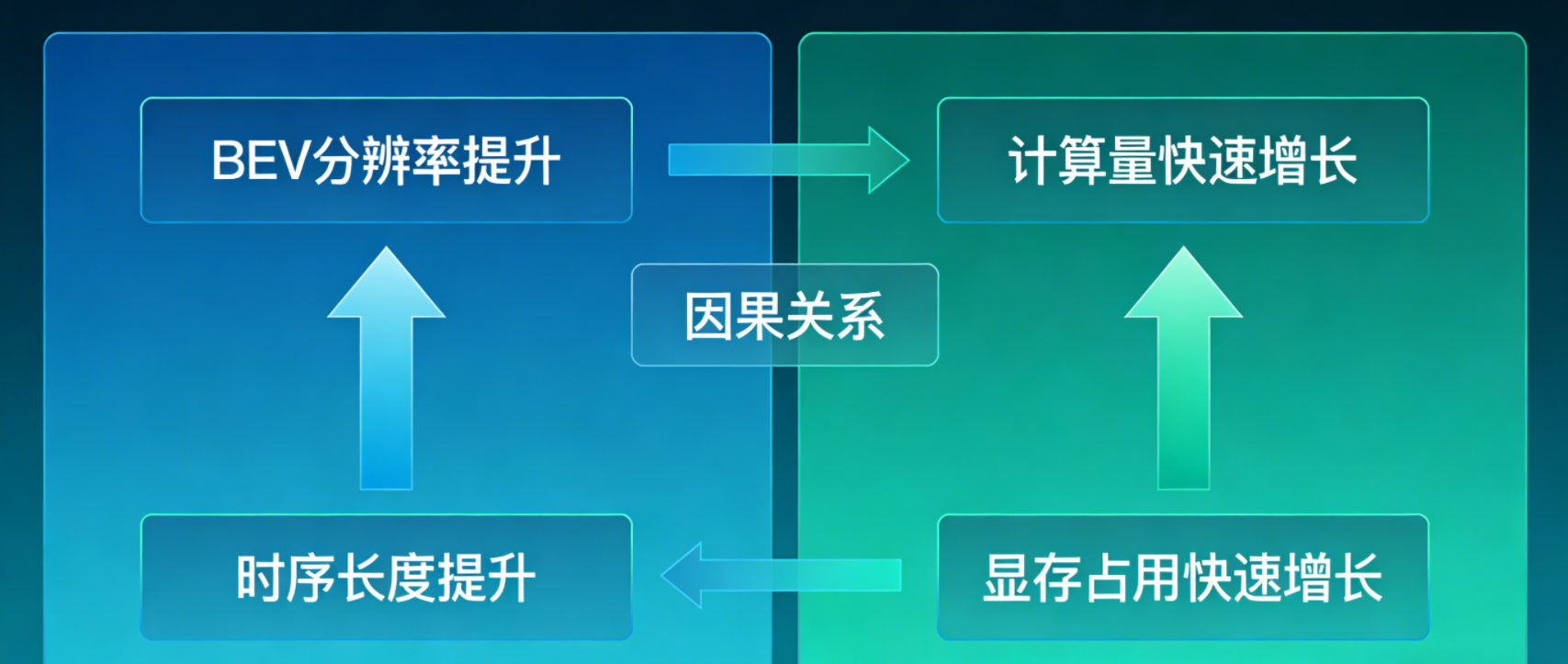
Dense BEV 的问题并不体现在某一个算子或某一个模块上,而是体现在整个系统的增长趋势上。为了提升感知精度,研究者往往需要提高 BEV 的空间分辨率、引入更长的时序窗口,或使用更复杂的全局建模机制。然而,这些改进几乎都会直接转化为计算复杂度和显存占用的指数式增长。
三、Sparse4D 的核心判断:世界不是空间,而是对象
Sparse4D 的出发点并不复杂,但它切中了问题的本质。自动驾驶系统真正关心的,并不是空间本身,而是空间中那些会与车辆发生交互的实体。这些实体具有明确的语义边界、持续的时间演化,以及对决策至关重要的状态变化。
在绝大多数真实驾驶场景中,可交互对象的数量是有限且稀疏的。道路、天空、空旷区域并不会频繁改变系统的行为,而车辆、行人、自行车等对象才是决策的核心。Sparse4D 正是基于这一观察,将建模的基本单位从“空间位置”转移到了“潜在目标”,从而彻底改变了 BEV 的建模重心。
四、从 Space-centric 到 Object-centric 的转变
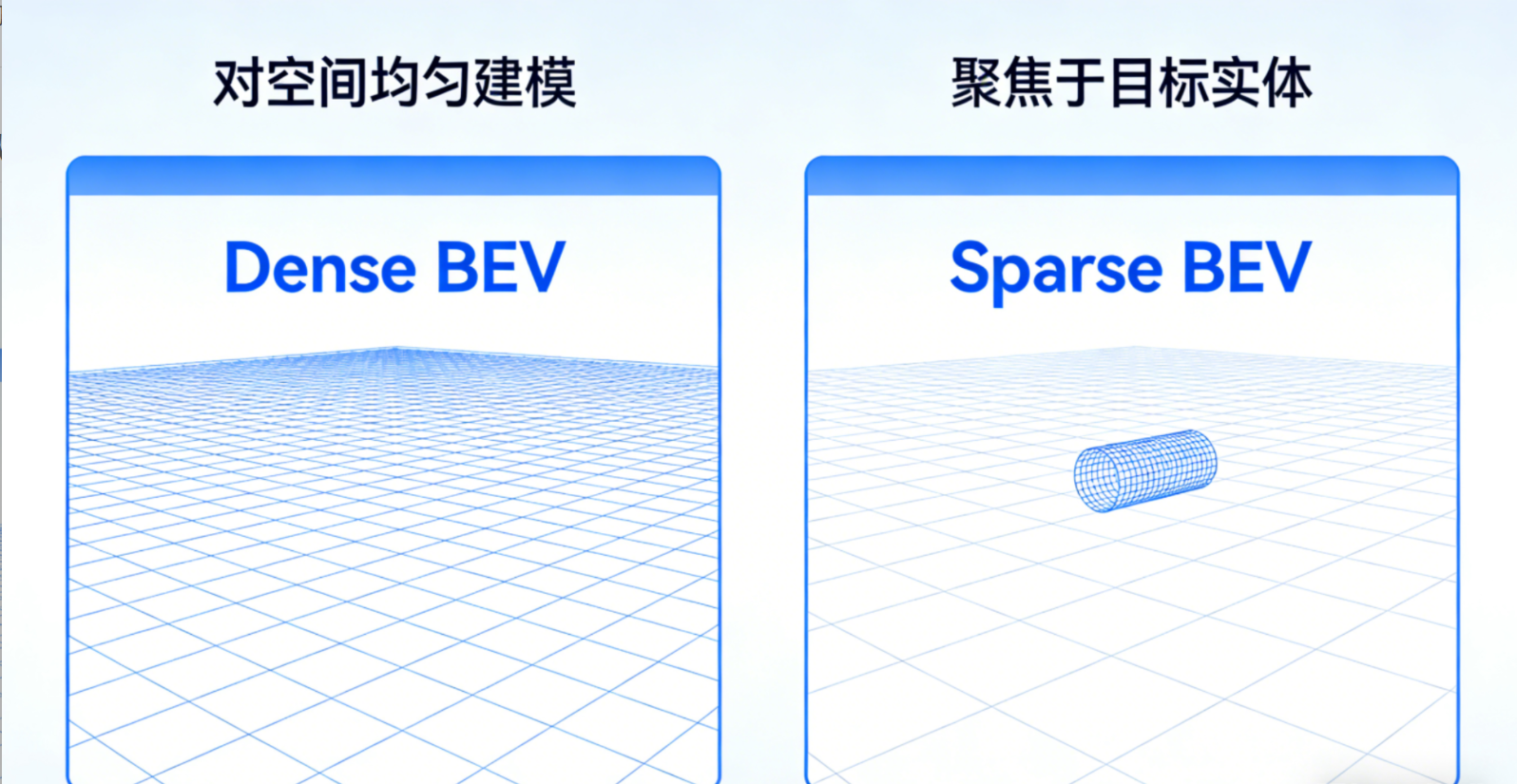
在 Dense BEV 中,模型围绕空间展开建模,目标只是空间语义的一种体现;而在 Sparse4D 中,空间退居为对象存在的背景,建模的核心变成了对象本身。这种转变并不是简单的稀疏化处理,而是对感知任务本质的一次重构。
当模型以对象为中心进行建模时,计算资源自然集中在有限数量的关键实体上,而不再被均匀地分摊到整个 BEV 平面。模型关注的重点不再是“某个位置是什么”,而是“某个对象在哪里、正在做什么、将如何变化”。这种建模方式与跟踪、预测等下游任务在语义上高度一致,使得感知结果更容易被系统整体吸收和利用。
五、时间维度:Sparse4D 中真正的第四维
Sparse4D 中的“4D”,并不仅仅意味着在 BEV 中引入时间作为一个附加维度,而是意味着时间被提升为建模的核心轴线之一。在 Dense BEV 方法中,时间往往通过多帧特征堆叠或 temporal attention 的形式引入,其主要作用是缓解单帧感知的不稳定性。
而在 Sparse4D 中,时间是围绕对象展开的连续过程。对象在不同时间步之间被显式关联,其状态随时间持续演化。历史信息不再只是辅助当前帧的补充,而是构成对象当前状态的重要组成部分。这种设计使得 Sparse4D 更接近一种持续状态估计系统,而非逐帧重建世界的感知模型。
六、Sparse4D 的克制:重新定义“足够理解世界”
Sparse4D 并不试图构建一个在任意时刻都完整、精细、全覆盖的 BEV 世界图景。它主动接受这样一个事实:在自动驾驶系统中,并非所有空间区域都需要被等价地理解,也并非所有位置都需要具备清晰、稳定的语义解释。对于那些长期为空、短期内不影响决策的区域,Sparse4D 选择不投入过多建模能力,而是将有限的计算资源集中用于理解关键对象的状态与演化。
这种取舍意味着,模型不再保证全局 BEV 语义的一致性,也不强调任意空间位置的可解释性。但换来的,是在时间维度上对关键实体更加稳定、连续的理解,以及在系统层面更加可控的复杂度。Sparse4D 所做的,并不是能力的简单削减,而是对“什么才是驾驶系统真正需要理解的世界”的一次重新定义。
七、Sparse4D 在 BEV 演进中的位置
Sparse4D 标志着 BEV 路线从“理论上可以建模整个世界”,转向“在系统允许的范围内持续理解关键世界”。
结语:Sparse4D 不是终点,而是拐点
Sparse4D 并没有给出一个完美、全面的世界模型,它给出的,是一个能够长期运行、持续更新、并服务于真实决策系统的答案。它提醒我们,在智能驾驶中,感知算法的目标并不是最大化对世界的覆盖,而是最小化对决策无关信息的依赖。
在后续的文章中,我们将重新回到 BEVFormer 与 BEVFusion,结合 Sparse4D 的视角,讨论这些方法在工程化过程中所暴露出的结构性问题,以及它们在 BEV 演进路径中的真实位置。
'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)