
在如今的电动车发布会上,如果不甩出128/256/512线激光雷达这张王牌,似乎都不好意思说自己懂智驾。
很多人以为加了激光雷达,车辆就有了上帝视角,计算压力会变小。大错特错。今天我们就从底层数据的角度,扒一扒激光雷达到底占用了多少算力,以及它为何让智驾芯片有苦说不出。
算力消耗
如果只看 NPU 的账面数字,处理激光雷达的数据似乎并不贵。
以主流的 NVIDIA Orin-X 平台为例,运行一个经典的 PointPillars 点云检测网络,大概只需要消耗 10-15 TOPS 的算力。即使是更先进、更复杂的 TransFusion架构,算力消耗通常也在 30-50 TOPS 之间。
听起来很划算对吧?200 TOPS 的芯片,切出 50 TOPS 给激光雷达,洒洒水啦?
并没有那么简单。
在嵌入式系统中,TOPS 只是衡量矩阵运算能力的指标,它就像是健身房里的卧推重量。但处理激光雷达数据,每次卧推,还要提前准备好工具。

第一步:预处理
摄像头吐出的是 RGB 图像,是稠密矩阵,天生就适合喂给 NPU 吃。
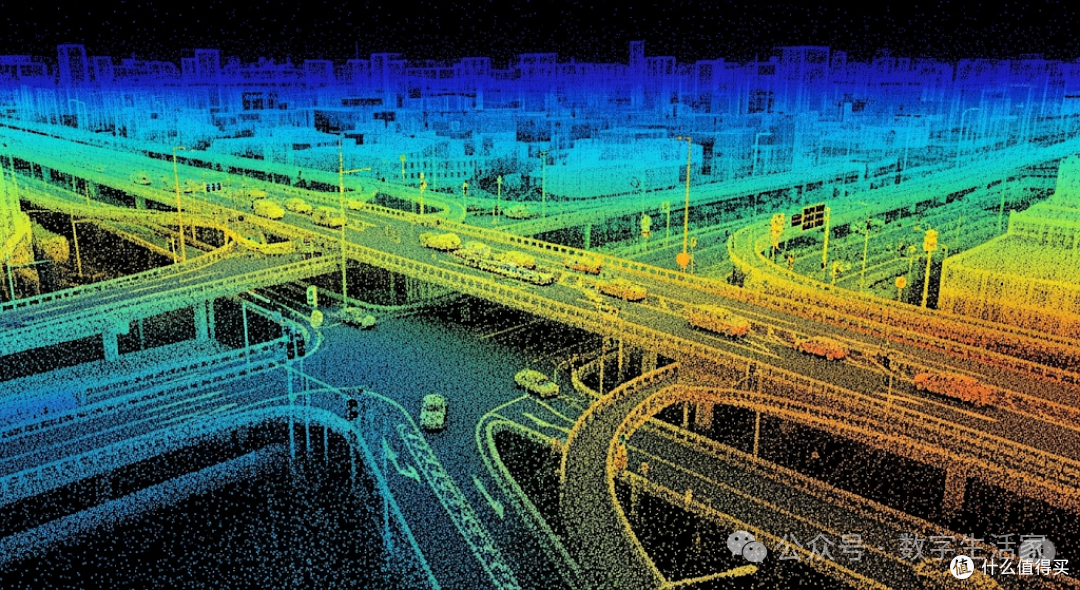
但激光雷达吐出的是什么?是点云。每秒 150 万个点,散落在三维空间里,无序、稀疏、且伴随噪点。在把这些数据喂给神经网络之前,必须进行预处理。最典型的步骤叫体素化:把无序的点变成规则的占用网格。
这是一个典型的逻辑密集型任务,而不是计算密集型任务。它包含大量的条件判断、循环和内存寻址。这种活NPU 干不了,只能扔给 CPU 去干。光是处理一颗激光雷达的体素化,就能吃掉 1-2 个宝贵的 CPU 核心。要知道,Orin-X一共也就 12 个核,还得跑操作系统、跑规划控制、跑通信协议。
第二:访存带宽
做过嵌入式的朋友都知道,很多时候系统卡顿不是算力不够,而是数据搬不过来了。
激光雷达的数据量虽然不如 800万像素的摄像头大,但它的数据结构非常松散。 为了处理这些稀疏数据,系统需要在 CPU 和 GPU/NPU 之间频繁地搬运数据。这就导致了DRAM 带宽的巨大消耗。
这就好比你去超市买东西,摄像头是一箱整整齐齐的牛奶,一把就能搬走;激光雷达是一地散落的黄豆,你得一颗颗捡起来装袋,这过程中消耗的时间和精力远超想象。

第三:融合的代价
这也是为什么 Tesla 和小鹏坚决要把雷达砍掉的原因之一。
当你同时拥有摄像头和激光雷达时,你面临一个终极哲学问题:当它们“吵架”了听谁的?
摄像头说前方有一个箱式货车(因为有纹理)。
激光雷达说前方是一堵白墙(因为它也是平的)。
为了解决这个问题,传统的后融合或现在的“BEV 特征级融合”,需要消耗大量的算力去做时空对齐。哪怕两者的标定误差只有 0.1 度,在 100 米外都会产生巨大的偏差。
为了把激光雷达的特征塞进 BEV 空间里和视觉特征融合,算法工程师需要设计极其复杂的网络结构。这部分的算力开销,往往比单独跑一个视觉网络还要大。
反面教材:200 TOPS 硬上三激光
我们来看一个业界真实存在的怪胎配置:
某款车型搭载的智驾芯片总算力仅在 200 TOPS 上下,但在营销上为了显得遥遥领先,硬是塞进去了 3 颗激光雷达。
这在系统工程上简直是灾难: 3 颗雷达全开,每秒产生的原始点云数据量高达 450万~500万个点。这颗 200 TOPS 芯片配套的 CPU 光是处理这 3 颗雷达的去畸变、时间同步和体素化,可能就要占去 60%-70% 的 CPU 算力。
结果就是强大的 NPU 空有一身肌肉,但因为 CPU 忙不过来,数据喂不进去,NPU 只能干瞪眼。
工程师为了让系统不崩,只能在软件上做手脚——虽然装了 3 颗雷达,但实际算法只跑中间那颗,两边的雷达只用来做最简单的障碍物触发(不进深度学习网络);或者干脆大幅降低雷达的采样频率,虽然会导致并线的时候看不到后方来车,但是系统好歹跑起来了。
这就好比买了一辆东风小康,非要给它装上三个波音 747 的引擎。除了发布会上好听,实际跑起来,车架子都要散架。
文章转载自公众号:期望氢气球

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)