
智能驾驶车辆通过环境感知系统,实时检测自车行驶的交通环境信息如交通参与者、道路信息、交通设施信息等,并综合自车行驶状态,判断自车按照既定路线能否安全到达目的地,若不能则自车会要求驾驶员/自动实时调整行驶状态(制动、转向、加速),保证车辆以最优的方式安全到达目的地。
智能驾驶系统分为三类,驾驶辅助(仅有提醒功能,不会对车辆进行任何干预)、高级驾驶辅助(可在横向或/和纵向上对驾驶员进行辅助,但不允许驾驶员长时间脱手)、自动驾驶(可在横向或/和纵向上对驾驶员进行辅助,允许驾驶员长时间脱手)。
系统通过辅助驾驶员甚至替代驾驶员来避免或减少交通事故发生,提高驾驶的安全性,同时减轻驾驶员驾驶疲劳程度,甚至在特定交通场景下完全替代驾驶员,达到解放驾驶员的目的。
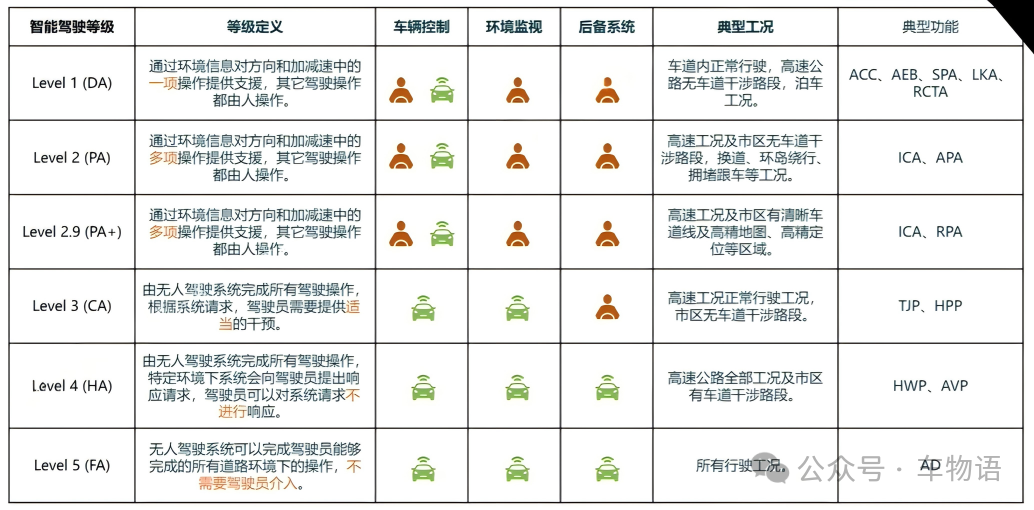
从L2到L3/4级别智能驾驶,最重要的变化在于驾驶员从车辆行驶环内脱离了出来。整个车辆需要在感知、控制、执行层面提高性能并增加冗余。
智能驾驶冗余的六种类型
感知冗余:多传感器数据融合技术可以保证车辆行驶构成中精准实现物体及行人的识别,从而支持车辆时刻做出正确的控制行为
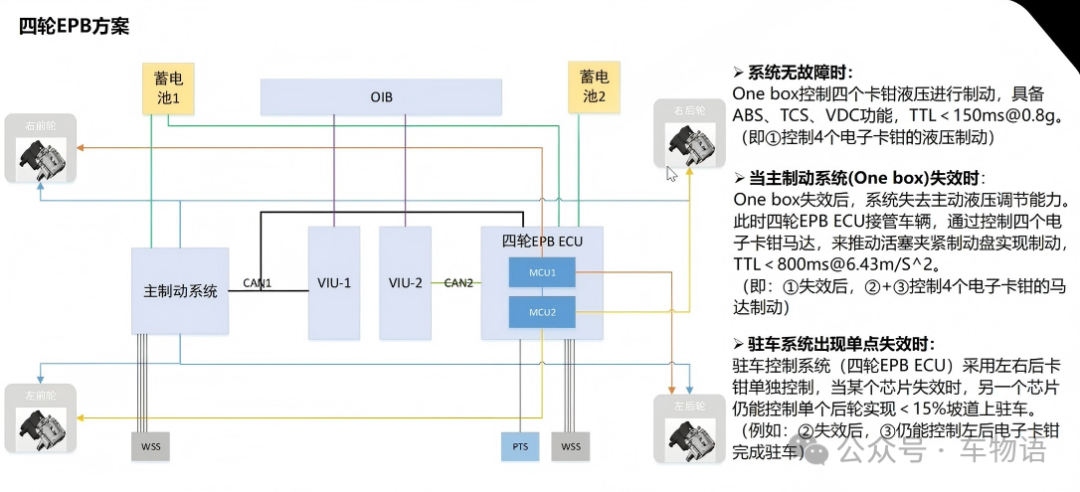
制动冗余:主制动系统失效后,备份系统依然提供一定的制动能力来维持制动控制及制动稳定性控制
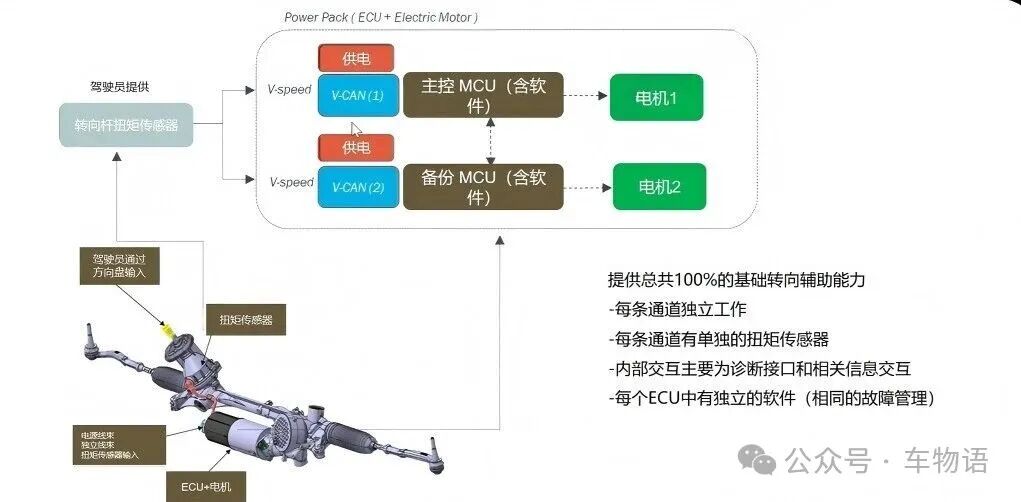
转向冗余;如果故障发生后的安全状态定义为继续运行而不是刹停,那么当一路转向系统故障后,备份系统需要能够支持车辆完成接下来的运行场景中的转弯工况
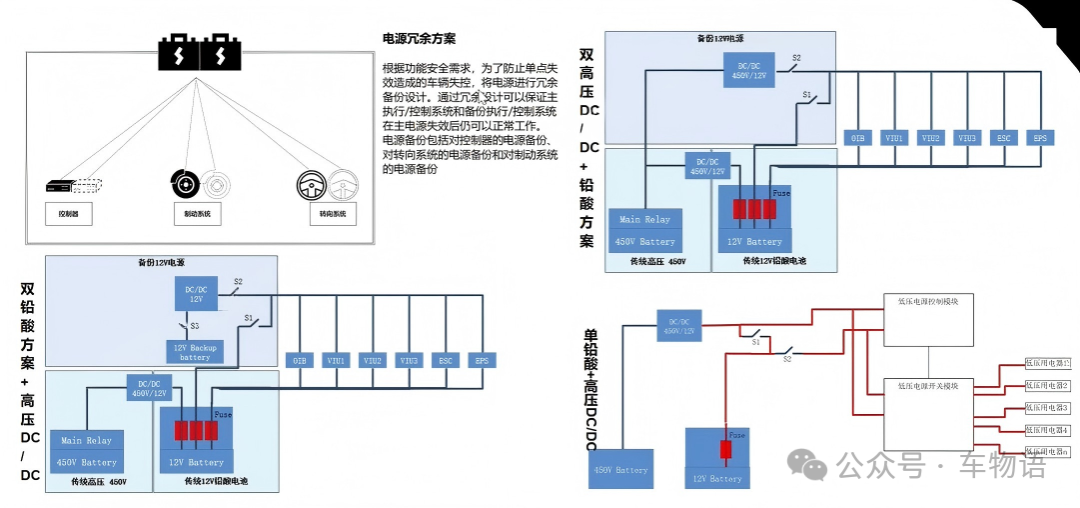
电源冗余;主电源失效后,备份电源能够支撑ECU完成安全降级动作
架构冗余:当单一链路出现信号中断,系统可实现信息的无缝安全衔接
控制器冗余:两个大脑互相监督、互为备份,主大脑故障发生时,备份大脑及时接管
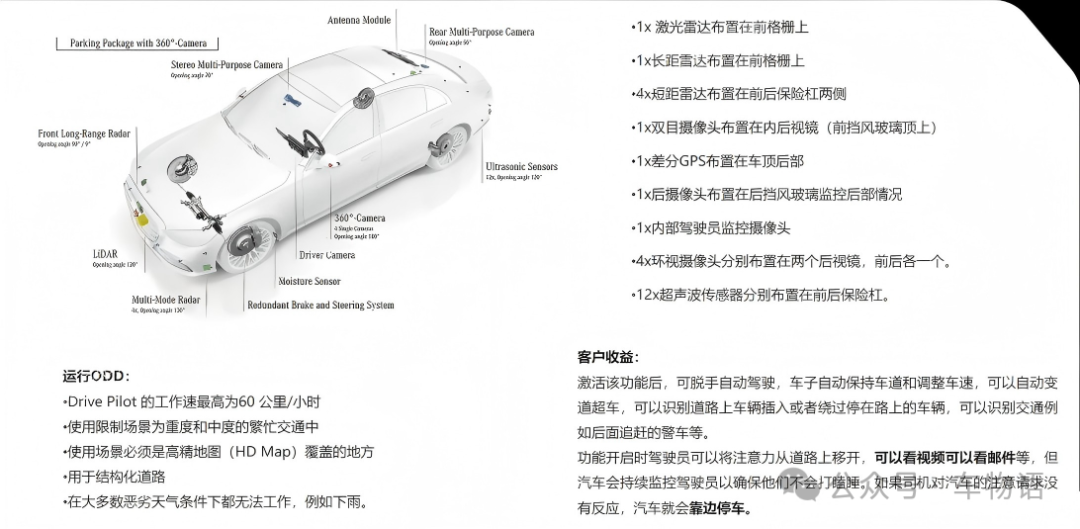
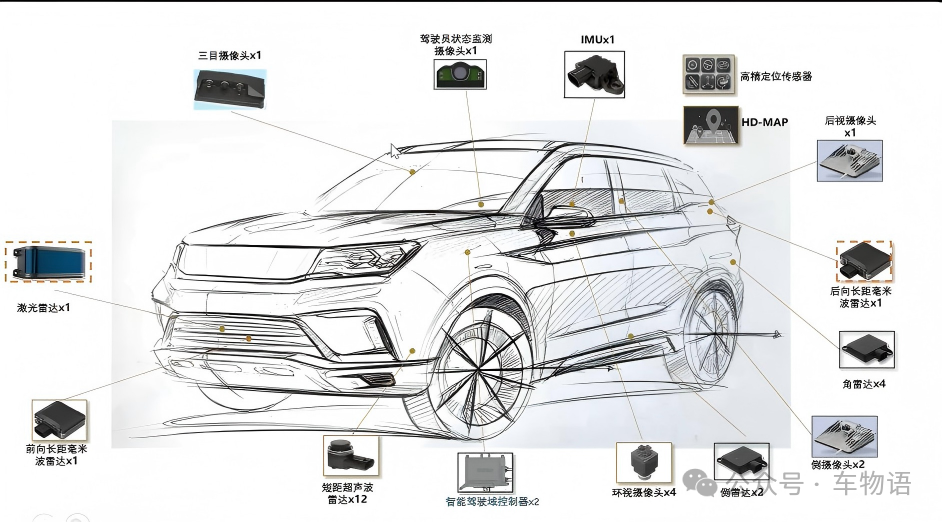
典型的L3系统
不同类型感知优缺点

感知冗余
制动冗余
转向冗余
电源冗余
架构/通信冗余 (Architecture/Communication Redundancy)
原理:防止信号传输中断导致系统失联。
实现方式:
双链路/多通道通信:关键信号通过两条独立的通信总线(如双CAN FD、以太网+5G)传输。当一条链路出现信号中断或干扰时,系统可自动切换到另一条链路,实现信息的无缝安全衔接。
定位冗余 (Positioning Redundancy) - 常归入感知或单独列出
原理:防止车辆在隧道、高楼区等GPS信号丢失时“迷路”。
实现方式:融合GNSS(全球导航卫星系统)、IMU(惯性测量单元)、高精地图、车轮轮速计以及视觉/激光雷达特征匹配。当卫星信号丢失,IMU和地图匹配可继续提供厘米级定位。
文章转载自公众号:车物语

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)