
智能驾驶(Intelligent Driving / Automated Driving)是当代汽车产业最核心的技术变革方向之一,它不仅是人工智能技术的集大成应用场景,更是衡量一个国家汽车产业竞争力和科技实力的重要标志。按SAE J3016标准,智能驾驶从L0(无自动化)到L5(完全自动驾驶)共分为六个等级,当前行业主流量产车型已跨越L2辅助驾驶阶段,正加速向L3有条件自动驾驶和L4高度自动驾驶迈进。本报告围绕智能驾驶完整技术栈,从传感器感知、定位地图、预测规划、决策控制、软件架构、功能安全到数据闭环,全景式拆解核心技术体系与量产工程实践。
技术深度决定产品高度。本报告面向汽车行业从业者、科技爱好者与内容创作者,帮助建立对智能驾驶技术体系的系统性认知,为产品传播与品牌叙事提供扎实的技术底气。阅读本报告,你将完整理解:感知系统如何让车辆看见周围世界?定位与地图如何让车辆知道我在哪里?预测与规划如何让车辆做出正确决策?控制执行如何让车辆安全行驶?软件架构如何支撑亿行代码的协同运行?功能安全如何为智能驾驶划定底线?数据闭环如何驱动系统持续进化?
一、智能驾驶系统概述与整体架构
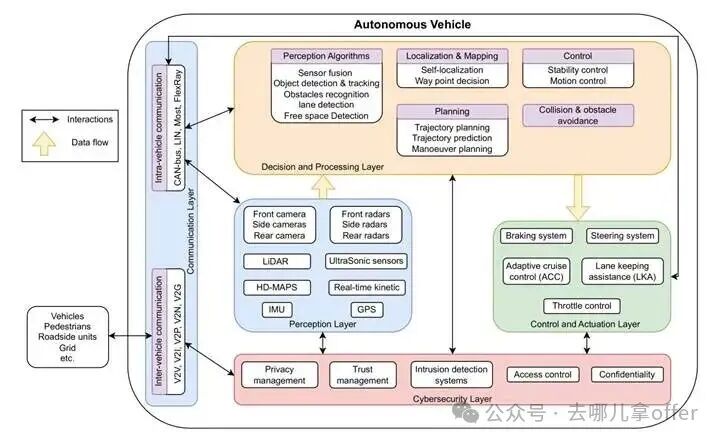
智能驾驶系统的硬件架构通常分为三个层级:传感器层负责环境感知与数据采集;计算平台层承载感知、定位、预测、规划、决策等核心算法,通常采用高算力SoC(如NVIDIA Orin、地平线J5、华为昇腾910)配合安全MCU的双芯片冗余架构,以满足功能安全对计算平台可靠性的严苛要求;执行器层接收控制指令,驱动车辆的转向(EPS电动助力转向系统)、制动(ESC电子稳定控制/eBooster线控制动)和动力系统(VCU整车控制器)。

图1感知-规划-控制数据流架构(来源:网络)
从软件视角,软件栈自下而上可划分为:操作系统与底层固件层、AUTOSAR CP/AP中间件与通信协议栈、感知算法层(视觉、LiDAR、雷达融合感知)、定位与高精地图层、预测与规划层、控制执行层,以及上层的功能应用层。SOA(面向服务架构)理念正逐步渗透,以提升软件复用性与OTA迭代效率。数据链路的端到端延迟需控制在100ms以内,才能保证在120km/h高速行驶时车辆有足够的安全反应距离(约为3.3米的安全裕量)。如图所示,从传感器原始数据到控制指令的完整数据链路,体现了智能驾驶系统感知-规划-决策-控制的高内聚低耦合设计逻辑,是理解整个智能驾驶技术体系的基础框架。
二、感知系统:传感器与多源融合
感知系统是智能驾驶的眼睛,负责从真实物理世界中实时提取车辆周边目标的位置、速度、类别与行为意图。当前量产方案以视觉摄像头、激光雷达(LiDAR)、4D毫米波雷达和超声波雷达为核心组合,每种传感器各有优劣势,多源融合是工程落地的主流路径。摄像头擅长语义理解(目标分类、车道线识别、交通标志检测),但在逆光、暗光、雨雾等恶劣光照条件下性能显著下降;激光雷达提供精确三维轮廓,测距精度达厘米级,但成本较高且对雨雪雾天气较为敏感;4D毫米波雷达在远距离测速和全天候感知上具有不可替代性,是恶劣天气下的感知主力;超声波雷达则在低速泊车场景(泊入泊出、障碍物检测)中成本效益最优,已是APA自动泊车的标配传感器。

图2多传感器融合系统架构:摄像头+LiDAR+毫米波雷达协同感知(来源:网络)
多传感器融合(Sensor Fusion)按融合阶段分为前融合(特征级Early Fusion)、后融合(目标级Late Fusion)和混合融合方案三类。前融合在特征空间统一多模态信息,信息损失少,但对传感器标定精度和时间同步要求极高(通常要求各传感器时钟偏差小于1毫秒);后融合各传感器独立检测再加权融合,实现灵活但容易产生漏检和重复检测问题。当前主流量产方案采用混合融合架构:摄像头做目标分类和车道线识别,4D雷达提供测速和远距离检测,LiDAR提供精确三维轮廓,最终通过卡尔曼滤波或深度学习融合网络输出统一的3D感知目标列表,供给下游预测和规划模块。2023年后,固态/半固态激光雷达成本大幅下探(单颗低于2000元人民币),使融合感知方案在15万级车型上实现量产,感知系统的硬件冗余度也随之提升,为L3功能安全提供硬件保障。
三、视觉感知算法:从CNN到Transformer
视觉感知是智能驾驶感知系统中信息密度最高的模块,经历了从CNN卷积神经网络到Transformer自注意力架构的范式转换。传统两阶段目标检测器(Faster R-CNN、Mask R-CNN等)先提出候选框再分类,检测精度高但推理速度慢;单阶段检测器(YOLO系列、FCOS、CenterNet)在精度与速度之间取得更好平衡,已广泛部署于量产车型。近年来,BEV(Bird's Eye View,鸟瞰图)感知成为行业共识,通过Transformer的Cross-Attention跨注意力机制,将多摄像头图像特征统一映射到以自车为中心的俯视空间,彻底解决了2D图像到3D世界的投影歧义问题,是高阶智能驾驶系统的标配技术。
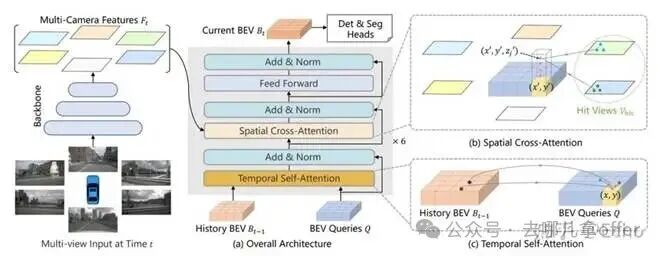
图3BEVFormer视觉感知架构:多摄像头→ BEV空间跨视角特征融合(来源:网络)
BEVFormer是BEV感知的代表性算法,其核心创新在于Temporal-Spatial Attention时序空间注意力机制。如图所示,模型首先对各路摄像头分别提取2D卷积特征,然后通过视角转换模块(View Transformer)利用历史BEV queries查询各摄像头特征,将2D图像信息投影到自车坐标系下的BEV三维空间,最后通过时序融合模块引入历史帧信息,大幅提升目标跟踪和运动预测的连贯性与准确性。华为SuperBEV、特斯拉Occupancy Network均基于BEV感知理念演进而来。这一技术路径的核心优势在于:跨摄像头目标一致性与时序平滑性显著优于传统单帧感知,且下游规划模块可直接使用自车坐标系的3D感知结果,无需额外坐标变换,降低了模块间接口的复杂度。BEVFormer等多摄像头BEV融合方案已成为2024年后L2+以上量产车型的标准视觉感知架构。
四、激光雷达与点云感知算法
激光雷达(LiDAR,Light Detection and Ranging)通过发射激光脉冲并测量反射时间计算距离,生成稠密三维点云,是高阶智能驾驶感知系统的核心传感器。相比摄像头,LiDAR天然具备精确深度信息,对恶劣天气(雨、雾、尘)的感知鲁棒性优于纯视觉方案,测距精度可达厘米级。点云感知算法经历了从PointNet/PointNet++(直接处理原始点云,保留精确空间位置信息)到PointPillars(将点云转换为俯视图下的伪图像Pillar,借助2D CNN高效处理,兼顾精度与速度,是目前车载部署的主流方案)的演进,再到PV-RCNN等融合两阶段检测优势的综合方案,算法成熟度持续提升。
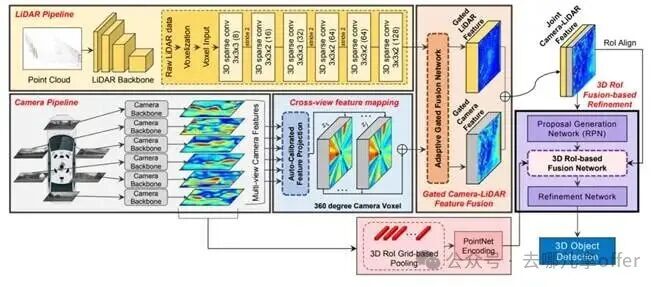
图4LiDAR与视觉深度学习融合网络:点云特征与图像特征跨模态交互(来源:网络)
在融合感知架构中,LiDAR与视觉的深度融合网络通常在特征提取阶段进行交互融合(Early Fusion),在BEV空间或透视图空间输出统一的3D检测结果。如图所示,模型同时处理点云数据的几何特征和摄像头图像的纹理语义特征,通过跨模态注意力机制实现特征交互,输出高质量的3D目标检测框(含位置、尺寸、朝向角)。全固态Flash激光雷达和FMCW(调频连续波)激光雷达预计在2026-2027年实现量产,届时LiDAR成本将进一步下探,推动高精感知方案向15万以下车型普及。对于L3以上的感知系统,通常采用2~3颗前向激光雷达加侧向补盲激光雷达的配置方案,实现360度无死角覆盖,满足功能安全对感知冗余的严苛要求。
五、定位与高精地图
精准定位是智能驾驶决策的前提,定位系统需要在全局坐标系下精确确定车辆位置(x,y,z坐标)和姿态(横滚角Roll、俯仰角Pitch、航向角Yaw),误差通常要求在10厘米以内(L3以上要求更高,达5厘米以内)。主流方案融合GNSS全球导航卫星系统、RTK实时动态定位、IMU惯性测量单元和视觉/LiDAR SLAM,取长补短。GNSS/RTK提供绝对定位坐标,精度可达厘米级,但在隧道、高架桥、城市峡谷等场景因信号遮挡和多径效应容易失效;IMU通过积分推算短期位移变化,抗干扰能力强,但存在累积漂移误差(通常每小时漂移1~2度航向角);视觉SLAM或LiDAR SLAM利用局部特征匹配提供相对定位,可在GNSS信号丢失时维持定位连续性。
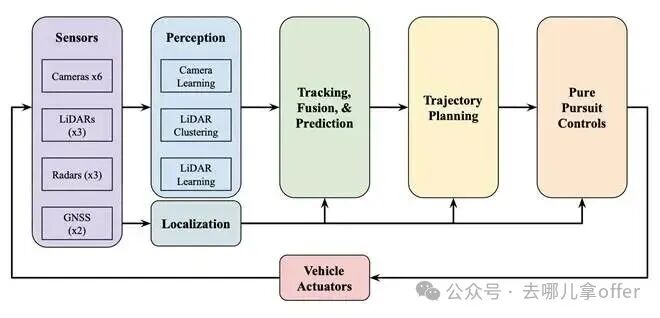
图5多源融合定位系统架构:GNSS+RTK+IMU惯性测量单元+SLAM同步定位与建图(来源:网络)
将这些子系统通过扩展卡尔曼滤波(EKF)或因子图优化(FGO)融合,形成高可用、高精度的组合定位系统。如图所示,IMU以100~200Hz高频输出短期位姿变化,GNSS/RTK以1~10Hz提供全局绝对位置修正,SLAM里程计提供局部特征匹配约束,三者通过EKF的预测-更新机制实时融合,输出厘米级连续定位结果。在城市峡谷等GNSS信号弱的场景,SLAM里程计可维持数十秒的高精度定位,配合高精地图的语义约束,定位可用性接近99.9%。高精地图(HD Map)包含厘米级精度的道路拓扑结构、车道线边界、坡度曲率、交通标志和信号灯位置等语义信息,是感知定位的重要先验。然而高精地图存在鲜度(更新频率低)和覆盖率(城市外道路覆盖不足)的瓶颈,因此以特斯拉FSD和华为ADS 2.0为代表的重感知轻地图路线正逐步兴起,通过实时视觉重建替代预制地图,在无高精地图覆盖的城市道路也能实现领航辅助驾驶。
六、预测与规划:理解意图、规划路径
感知回答周围有什么,预测回答他们要做什么,规划回答我该怎么走,这三个模块共同构成智能驾驶的大脑。轨迹预测(Trajectory Prediction)需要预测周围交通参与者(车辆、行人、骑行者)在未来3~10秒内的运动轨迹和行驶意图。早期预测方法以规则驱动为主(IDM智能驾驶模型、MOBIL跟驰模型),通过物理运动学方程描述车辆跟驰和换道行为;随着深度学习发展,GNN(图神经网络,用于建模多智能体交互关系)、LSTM长短时记忆网络(建模时序运动模式)、Transformer序列模型已成为主流预测算法,能够建模多智能体之间的交互博弈关系。关键挑战在于意图的不确定性:同一场景下,行人可能有多种合理的行进路线,骑行者也存在突然变道的可能性,纯确定性的预测无法覆盖所有合理场景。
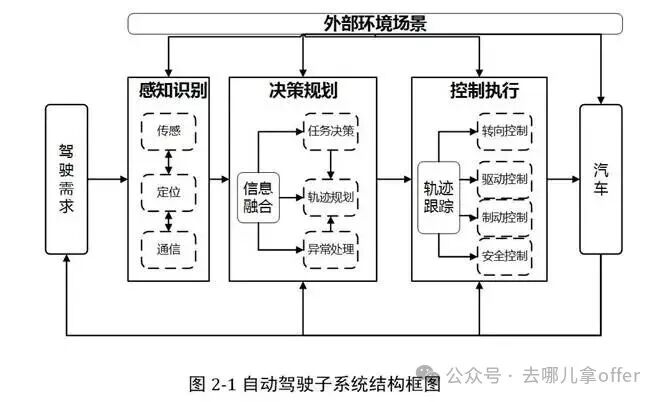
图6预测-规划-控制模块数据流:感知输入→多模态轨迹预测→代价优化规划→控制指令(来源:网络)
因此,预测模块通常输出多模态轨迹(Multi-Modal Prediction),即一个目标的多条可能轨迹及其对应概率分布,供下游规划模块做稳健决策。如图所示,预测模块接收感知目标列表与地图拓扑信息,输出所有交通参与者的多模态轨迹候选集及其概率分布;规划模块在此基础上进行代价函数(Cost Function)评估,综合考虑安全性(碰撞风险)、舒适性(加速度、曲率平滑度)和效率(通行速度)三大目标,选择总代价最小的行驶轨迹;控制模块将该轨迹通过控制器(横纵向解耦或MPC协同控制)转化为具体的转向、节气门与制动指令。业界广泛采用的规划方法包括:EM Planner(Expectation-Maximization迭代优化规划器,兼顾安全与效率)、IPM(基于采样的模型预测控制),以及端到端规划(直接用神经网络从感知输入映射到控制输出,特斯拉FSD v12是其典型代表,简化了系统架构但安全性验证仍是核心挑战)。
七、决策与控制:执行驾驶行为
决策模块在感知的不确定性和规划的多种路径选项之间,综合安全性、舒适性和通行效率,选择最优驾驶行为并传递给控制模块,驱动车辆执行具体的转向、加减速动作。智能驾驶的决策方法大致分为三类:规则式(如有限状态机FSM,定义明确的驾驶状态转移规则,如车道保持→变道→车道保持的离散状态切换)、学习式(模仿学习从人类驾驶数据中学习决策策略,或深度强化学习在仿真环境中自主探索最优策略)和混合式(以规则为安全底座保证安全下限,以学习式策略提升拟人化体验)。工业界主流方案采用混合式:低复杂度场景(高速巡航、结构化道路)用确定性规则保证安全上限;高复杂度交互场景(密集交叉路口、慢行车辆绕行、cut-in插入)通过博弈模型与对方车辆的意图做交互预测,选择最优时机执行动作。

图7横向控制架构:Pure Pursuit + LQR路径跟踪控制器(来源:网络)
控制模块分为纵向控制(纵向加减速)和横向控制(转向)两部分,二者通常采用解耦设计以降低控制器设计复杂度。纵向控制通常采用MPC(模型预测控制)或PID控制器,以本车和前车的相对距离、相对速度为输入,输出节气门开度或制动主缸压力指令;横向控制多采用Pure Pursuit(纯追踪)或Stanley方法完成路径跟踪,高端方案升级为LQR(线性二次调节器)或MPC以提升弯道性能和鲁棒性。如图所示,规划模块输出的参考轨迹由控制模块接收,Pure Pursuit算法计算前视lookahead点的横向偏差,LQR/MPC控制器根据车辆动力学模型(自行车模型或动力学模型)输出前轮转角指令,最终由EPS电动助力转向系统执行机械转向动作。整个控制环路的闭环执行频率通常为100Hz(控制周期10ms),以保证转向的实时性与平顺性。当车辆进行紧急避障或高速过弯时,纵向加减速度与横向转角之间存在耦合关系,基于MPC的横纵向协同控制可将二者统一建模,是高动态场景下实现安全稳定控制的核心技术。
八、智能驾驶软件架构:SOA与中间件
智能驾驶的软件复杂度远超传统嵌入式系统,一辆L3以上车型的软件代码行数可达数亿行,涉及实时操作系统、AUTOSAR CP/AP中间件、算法框架、通信协议栈、功能安全机制、OTA升级等多个技术层次。软件架构的合理性直接决定了系统的可维护性、可扩展性和OTA迭代效率。AUTOSAR(Automotive Open System Architecture,汽车开放系统架构)由全球主要汽车OEM和供应商联合制定,是事实上的行业标准软件架构框架,分为Classic Platform(CP)和Adaptive Platform(AP)两个子平台。CP面向传统ECU(发动机管理、制动控制、转向控制)等实时性要求极高(微秒级响应周期)的嵌入式场景;AP面向高算力SoC(如NVIDIA Drive Orin、地平线J5、华为昇腾910)上的智能驾驶应用,支持C++11/14现代编程语言、POSIX操作系统和动态服务部署,支持运行时服务发现和按需加载,是实现软件定义汽车(SDV)的核心架构基础。
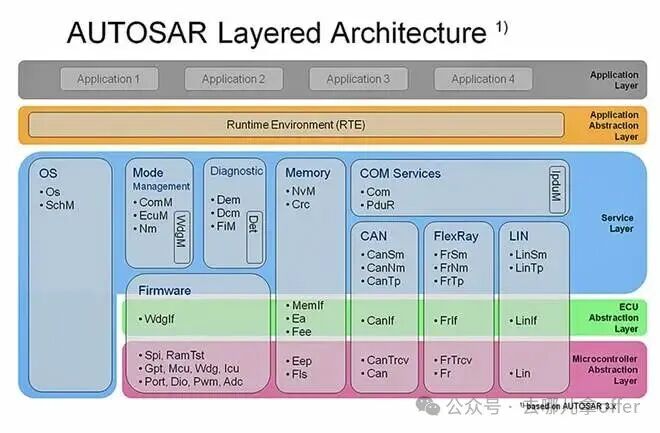
图8基于AUTOSAR CP/AP分层的智能驾驶软件架构:基础软件+中间件+应用层(来源:网络)
软件自下而上分为硬件抽象层(MCAL微控制器抽象层,将芯片寄存器操作封装为标准化接口)、基础软件层(BSW,包括通信栈CAN/CAN-FD/Ethernet/SOME/IP/DDS、内存管理、IO抽象、操作系统OS等基础服务)、运行时环境层(RTE,连接应用层与基础软件层,提供信号路由和服务调用接口)以及应用软件层(SWC软件组件,如感知算法、定位算法、规划算法、控制算法等功能组件)。AP平台的引入使得在高性能SoC上运行的算法服务可以动态部署和在线更新,为整车OTA软件升级奠定了架构基础。SOA(Service-Oriented Architecture,面向服务的架构)进一步将感知、定位、规划、控制等功能抽象为标准化的原子服务(Primitive Service)和组合服务(Composite Service),通过SOME/IP或DDS中间件协议进行服务发现与调用,服务可独立开发、测试和部署,大幅提升了软件复用率和迭代效率。以大众CARIAD、吉利SEA浩瀚架构等为代表的主机厂,已明确将SOA软件平台作为下一代数字架构的核心战略。软件架构的演进方向是从分布式ECU向域控制器集中(DCU),再到中央计算平台+区控制器(Zonal Architecture),最终实现整车软件的一体化中央计算。
九、功能安全:智能驾驶的工程底线
智能驾驶系统一旦失效,可能导致严重交通事故,因此功能安全是智驾产品不可逾越的工程底线。ISO 26262(道路车辆功能安全)标准从系统、硬件、软件三个维度,定义了从概念设计到量产的完整全生命周期安全要求,并引入ASIL(Automotive Safety Integrity Level,汽车安全完整性等级)从A到D四个等级来量化安全要求。ASIL A最低,ASIL D最高,对应的单点故障度量(SPFM,要求>97%)和潜在故障度量(LFM,要求>90%)要求极为严苛。对于L3以上的智驾功能,安全相关系统通常需要达到ASIL D等级,这意味着:硬件需要采用双核锁步(Dual-Core Lockstep)、ECC内存纠错、电压监控等冗余设计;软件需要满足MC/DC(修正条件/判定覆盖)级别的代码覆盖率要求(通常>99%);系统架构需要设计故障检测与安全状态转换机制(Fault Detection → Transition to Safe State)。
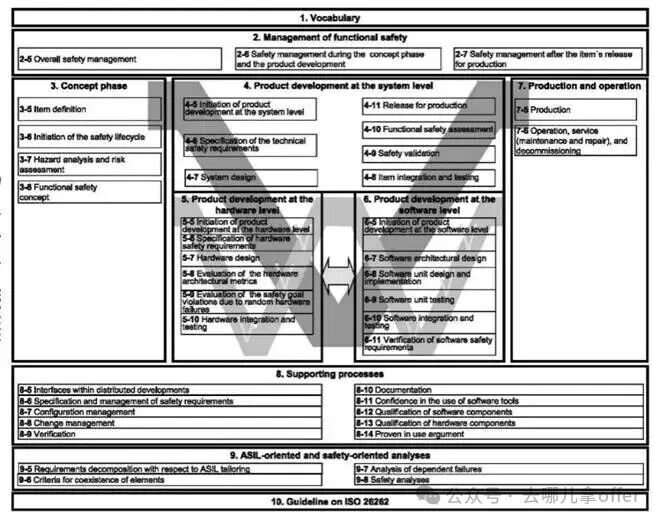
图9ISO 26262功能安全V模型开发流程:概念阶段→系统/硬件/软件开发→验证确认(来源:网络)
ISO 26262定义了从HARA危害分析与风险评估(识别危害事件、评估暴露度/可控性/严重性、确定ASIL等级)→ 安全概念设计(定义安全机制与ASIL分解策略,如1oo2双模冗余、2oo3三取二表决)→ 架构设计 →软硬件详细设计与实现 → 单元测试/集成测试/系统测试 → 安全确认与认可(Validation)的完整V模型开发流程。预期功能安全(ISO 21448 SOTIF)则关注系统本身不存在随机硬件故障或系统性软件缺陷,但由于感知算法局限、ODD边界条件或合理可预见的误用导致的危险事件。例如,视觉感知系统在强逆光条件下将白色货车车厢误识别为天空而未及时制动,是典型的SOTIF问题。SOTIF的应对策略包括:扩大实车测试里程(行业头部企业积累超过1亿公里路测数据)、建设标准化场景库(Euro NCAP ASIS、SOTIF GSCE场景库)、感知模型长尾Corner Case挖掘与对抗训练,以及安全兜底策略——当系统感知置信度低于预设阈值时,主动退出智驾功能并提醒驾驶员接管。功能安全不是事后验证,而是从第一行代码开始就嵌入系统设计DNA的工程哲学。
十、数据闭环与仿真测试
智能驾驶系统的持续迭代依赖于高效的数据闭环:从量产车辆回传真实场景数据、自动化数据标注、深度学习模型训练、仿真验证到OTA软件推送,整个闭环的效率直接决定了智驾系统的进化速度。量产车辆通过影子模式(Shadow Mode)在不触发车辆控制的情况下,持续记录传感器原始数据、感知中间结果、规划决策结果和人类驾驶员接管信号。当发生感知分歧(系统感知结果与实际环境不一致)、规划争议(系统决策与人类驾驶员行为不一致)或长尾Corner Case(罕见但危险的特殊场景,如施工桩桶闯入、逆行电动车、极端天气)时,触发关键数据片段的回传机制,将数据上传至云端数据中心进行存储和分析。

图10自动驾驶数据闭环架构:量产数据回传→自动化标注→模型训练→仿真验证→OTA推送(来源:网络)
数据回传后,通过自动化标注平台(如基于SAM分割模型的自动标注、多模态大模型辅助标注)实现低成本快速标注,将一个长尾场景的标注成本从数千元降至数百元,标注效率提升10倍以上,再进入模型训练流程。特斯拉的Data Engine数据引擎、华为的Octopus大模型数据闭环体系是业界标杆,均实现了从数据发现问题到模型迭代上线的自动化闭环,将一个长尾场景从发现到解决的周期从数周缩短至数天。实车路测成本高、周期长,仿真测试因此成为智能驾驶验证的核心手段。主流仿真平台包括CARLA开源仿真器、LGSVL、Prescan、Scaner,以及各家自研仿真引擎(华为Octopus、百度Apollo Simulation等)。高保真仿真需要同时解决三大核心问题:传感器仿真(摄像头物理渲染、LiDAR射线模拟、毫米波雷达杂波模型)、交通流仿真(多样化的背景交通行为逻辑)和车辆动力学仿真(真实的轮胎物理特性)。随着NeRF(神经辐射场)和3D Gaussian Splatting等新渲染技术的引入,仿真环境的真实度持续提升,虚实迁移(Sim2Real)的感知性能差距正在缩小。成熟智驾企业的仿真里程与实车里程配比已达100:1甚至1000:1以上,有效降低了实车测试成本和周期,加速了功能迭代速度。
十一、技术趋势与未来展望
智能驾驶正处于从辅助驾驶向自动驾驶跨越的关键阶段,以下五大趋势将在未来3~5年深刻重塑行业竞争格局。第一,端到端大模型重塑软件栈:特斯拉FSD v12、Wayve LINGO-1、华为端到端ADS和OpenDriveLab的DriveTransformer等为代表,基于大规模真实驾驶视频数据(特斯拉积累超过1500万段Clip)通过模仿学习或强化学习训练的端到端神经网络,正逐步替代传统的模块化感知-规划-控制链路。端到端方案简化了系统架构(从数十个独立模块缩减为1~2个神经网络)、消除了模块间接口误差累积、提升了系统的泛化能力,但安全性可解释性和Corner Case兜底策略的设计仍是产业落地的核心挑战。第二,城市NOA大规模落地:2024年被视为城市NOA元年,华为、小鹏、理想、比亚迪等主流厂商加速城市高阶智驾功能的推送,预计2026年城市NOA将覆盖超过100座城市,成为25万元以上车型的标配功能。
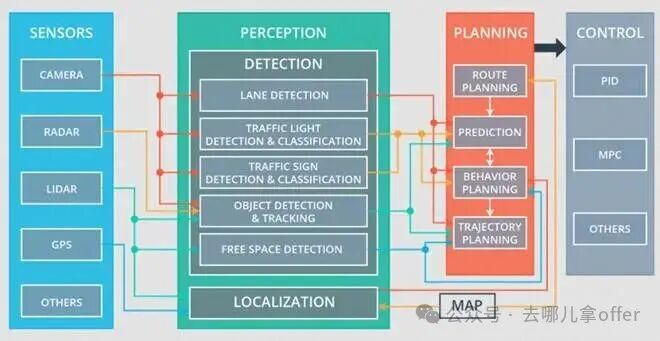
图11智能驾驶技术演进路线:从模块化感知-规划-控制到端到端大模型(来源:网络)
第三,传感器降本与全固态激光雷达:全固态Flash激光雷达和FMCW(调频连续波)激光雷达预计在2026-2027年实现量产(FMCW可同时测距和测速,且抗干扰能力更强),届时传感器成本将进一步下探,推动高阶智驾功能向15万以下车型普及。第四,车路云一体化(V2X):单车智能与V2X协同发展,路侧安装激光雷达和摄像头进行协同感知(减少单车感知盲区)、云端大模型提供全局最优路径规划决策,与单车感知融合后,可显著提升鬼探头(鬼探头是指驾驶员视野被遮挡突然出现的行人/车辆,是智驾系统最危险的Corner Case之一)、交叉遮挡等高危场景的安全性,推动L4自动驾驶在特定场景(园区、港口、矿区)的商业化率先落地。第五,大模型赋能数据闭环:多模态大模型(如GPT-4V视觉语言模型)正在深度嵌入数据标注、场景理解、测试验证等数据闭环核心环节,进一步提升自动化程度。掌握数据闭环效率与端到端大模型能力的厂商,将在未来3~5年的竞争中建立决定性的技术护城河。
结语
智能驾驶是一门横跨机械工程、电子硬件、计算机视觉、深度学习、博弈论、功能安全和大规模软件工程等十余个学科的综合性技术。从传感器感知到决策规划,从控制算法到软件架构,从功能安全到底层硬件,每一个环节都有其独特的工程挑战与技术壁垒。理解这些挑战的本质,不仅是技术从业者的必修课,也是汽车品牌讲好智能化故事的底层能力——只有真正掌握核心技术逻辑,才能写出既有技术深度、又能引发读者共鸣的内容。
本文系统梳理了智能驾驶的完整技术拼图:感知系统的多传感器融合与BEV感知架构如何让车辆看见世界?多源融合定位与SLAM技术如何让车辆精确定位?多模态轨迹预测与博弈决策如何让车辆理解周围意图?横纵向协同控制如何让车辆安全行驶?AUTOSAR与SOA软件架构如何支撑亿行代码高效协同?ISO 26262与SOTIF如何为智能驾驶划定工程底线?数据闭环与仿真测试如何驱动系统持续进化?端到端大模型与城市NOA将如何重塑未来出行?
技术深度决定产品高度,认知广度决定传播力度。唯有真正掌握核心算法逻辑、系统架构设计与安全工程方法,才能在智能驾驶这场百年未有之大变局中,真正做出有竞争力的产品,讲出有说服力的故事,让汽车技术被更多人看见、读懂、记住。这正是智车言的使命——让汽车技术被更多人看见、读懂、记住。
文章转载自公众号:去哪儿拿offer

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)