
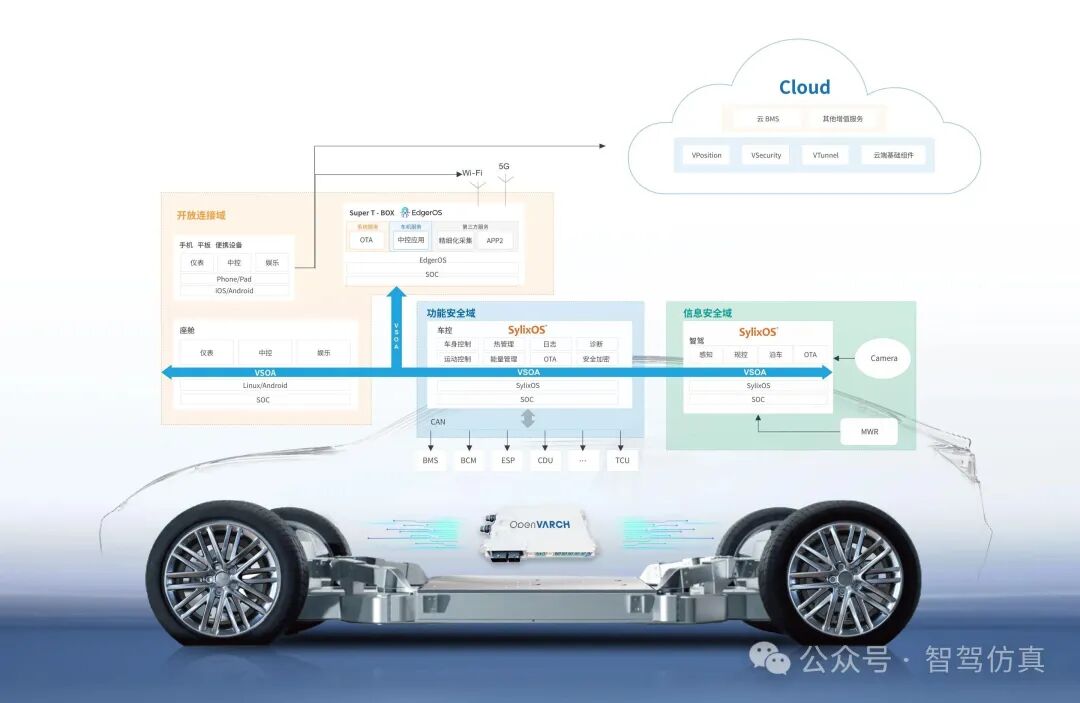
一套可落地、可量产的智能驾驶系统,能够模拟人类驾驶员的完整操作逻辑:通过传感器感知环境、依托算法决策判断、通过整车执行动作,同时搭配安全防护、人机交互、云端协同体系,适配复杂多变的道路交通场景。
FUTURE TECHNOLOGY
感知定位层:筑牢环境认知基础
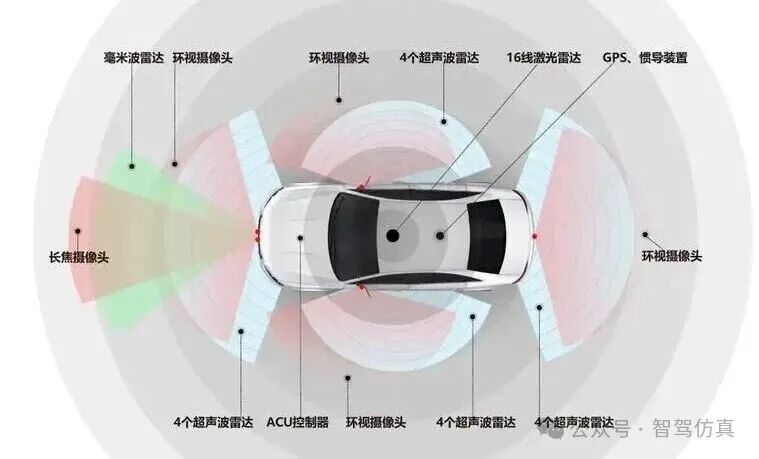
感知定位层是智能驾驶系统的数据输入源头,也是所有智驾功能落地的前提,核心解决“车辆在哪、周围有什么”的核心问题,主要包含传感器采集、数据融合、高精地图、融合定位四大核心模块。
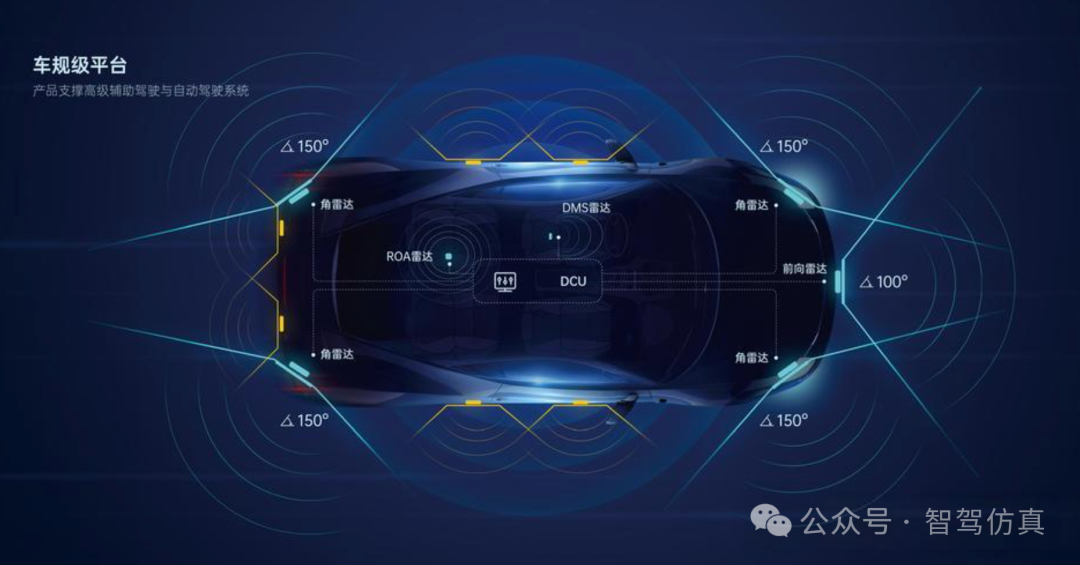
在硬件采集端,系统搭载多类主流车载传感器,形成多传感器互补冗余的采集体系:激光雷达精准测距建模、毫米波雷达抗干扰适配雨雪雾恶劣天气、高清摄像头识别车道、交通标识、红绿灯及行人车辆、超声波传感器适配近距离泊车、障碍物探测场景。各类传感器7×24小时实时采集车辆周边道路拓扑、障碍物位置、行人动向、交通信号等全域环境数据,实现“无死角”环境信息捕捉。
单纯的单一传感器数据存在误差、盲区与局限性,因此数据融合模块是感知层的核心核心。该模块通过专属融合算法,对多维度传感器原始数据进行清洗、匹配、关联与重构,弥补单一硬件的感知缺陷,剔除无效干扰数据,最终输出精准、统一、全面的全局环境模型,让车辆对周边场景的认知远超单一传感器的判断维度。
同时,系统依托高精度地图实现结构化环境认知。区别于普通民用地图,智驾专用高精地图包含精细化车道线、道路拓扑结构、交叉口形态、交通标志分布、路面属性、路口通行规则等海量静态数据,为车辆提供先验环境信息,辅助感知模块预判路况、识别复杂道路场景。
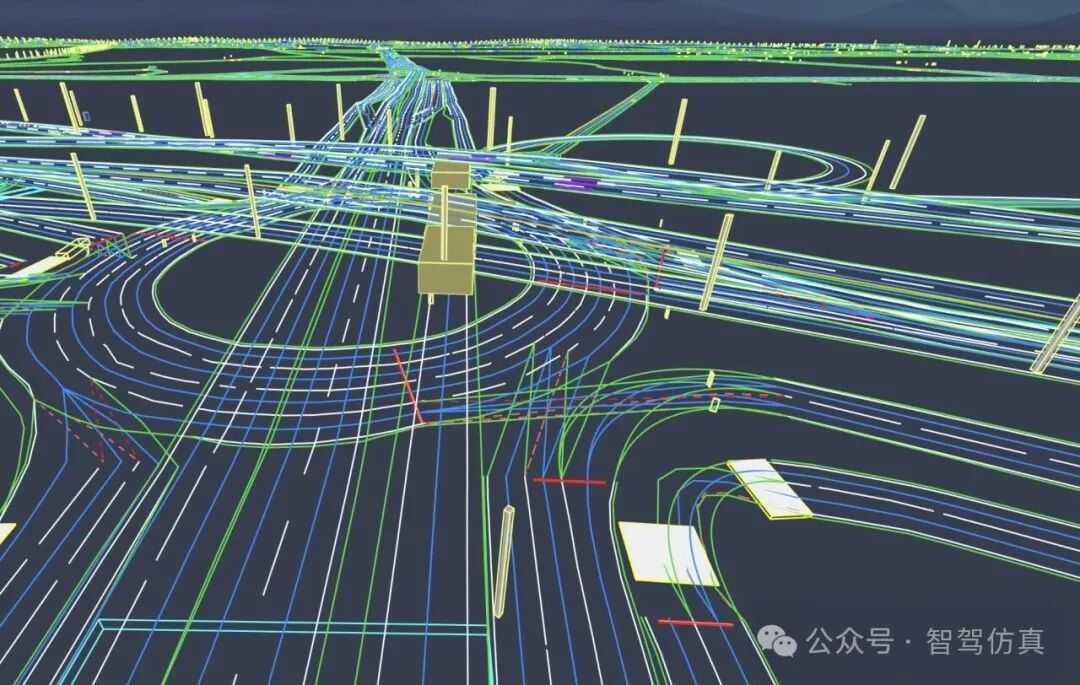
基于感知融合数据与高精地图先验信息,融合定位模块完成车辆自身状态精准解算。通过多源数据融合算法,实时估算主车的精准位置、车身姿态、行驶速度、加速度、航向角度等核心运动参数,实现厘米级定位,为后续决策规划、轨迹控制提供精准的坐标基准,从根源避免定位偏差导致的行驶异常。
FUTURE TECHNOLOGY
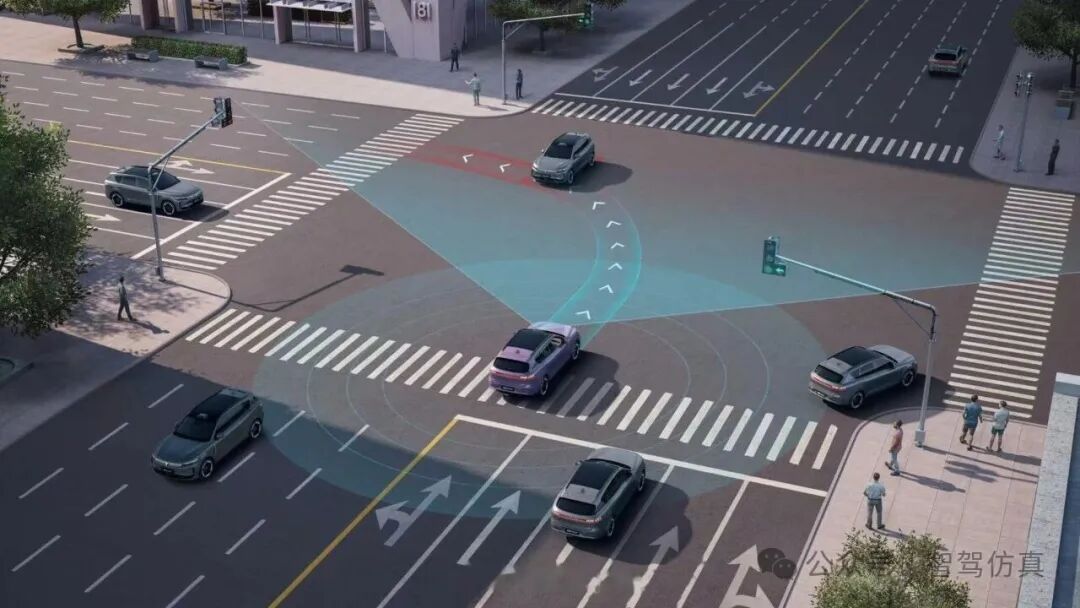
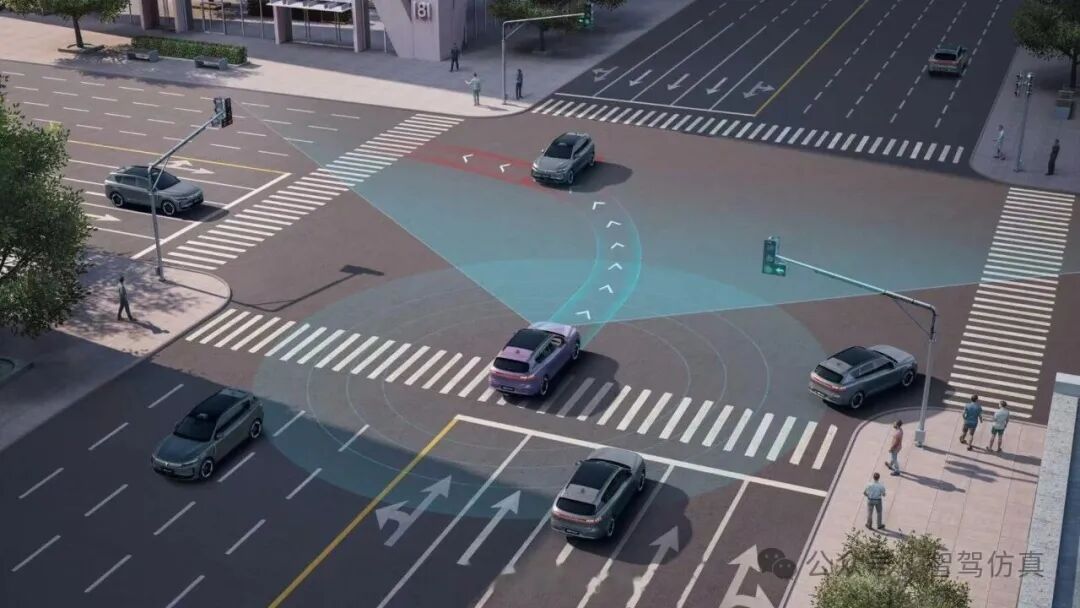
决策控制层:实现自主行驶闭环
决策控制层是智能驾驶系统的核心中枢与执行终端,承接感知定位层的环境与定位数据,解决“怎么开、开多快、如何避险”的核心问题,分为决策规划与整车控制两大核心模块,是智驾智能化、自主性的核心体现

决策指令生成后,由控制系统作为“执行手脚”完成落地落地。该模块是智驾算法与车辆底盘硬件的连接桥梁,负责将上层抽象的决策规划指令,转化为车辆可识别的底盘控制信号,精准驱动整车执行加速、减速制动、方向盘转向、档位切换等操作。同时控制系统支持毫秒级动态调节,可根据车辆实时状态、路面工况微调控制参数,保证轨迹跟踪精度,规避操控滞后、车身抖动等问题,实现决策与执行的无缝衔接,保障行驶稳定性。
FUTURE TECHNOLOGY
交互安全通信层:构建量产安全体系
如果说感知、规控层是智驾的核心能力,那么交互、安全、通信模块就是系统稳定量产、安全落地、持续迭代的核心保障,构建起人机协同、风险兜底、车云互通的完整闭环,是高阶智驾不可或缺的关键组成
人机交互模块承担人车协同的核心作用,打通驾驶员与智能驾驶系统的沟通通道。通过车载显示屏、仪表界面、语音交互、灯光提示、震动预警等多元形式,实时向驾驶员同步智驾系统工作状态、当前行驶模式、路况风险、故障告警、路径规划信息等内容。同时支持驾驶员手动介入、模式切换、指令下发等操作,实现人机权责清晰、无缝接管,兼顾智能驾驶的便捷性与人工驾驶的安全性,适配全场景人车协同需求。
文章转载自公众号:自动驾驶仿真联盟

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)