
在将topicname改成地平线可识别的“robosense”后重新录制了激光雷达pack包,并且转成了bag文件,但是在我准备把bag文件转成一帧一帧的pcd文件后出现了问题:
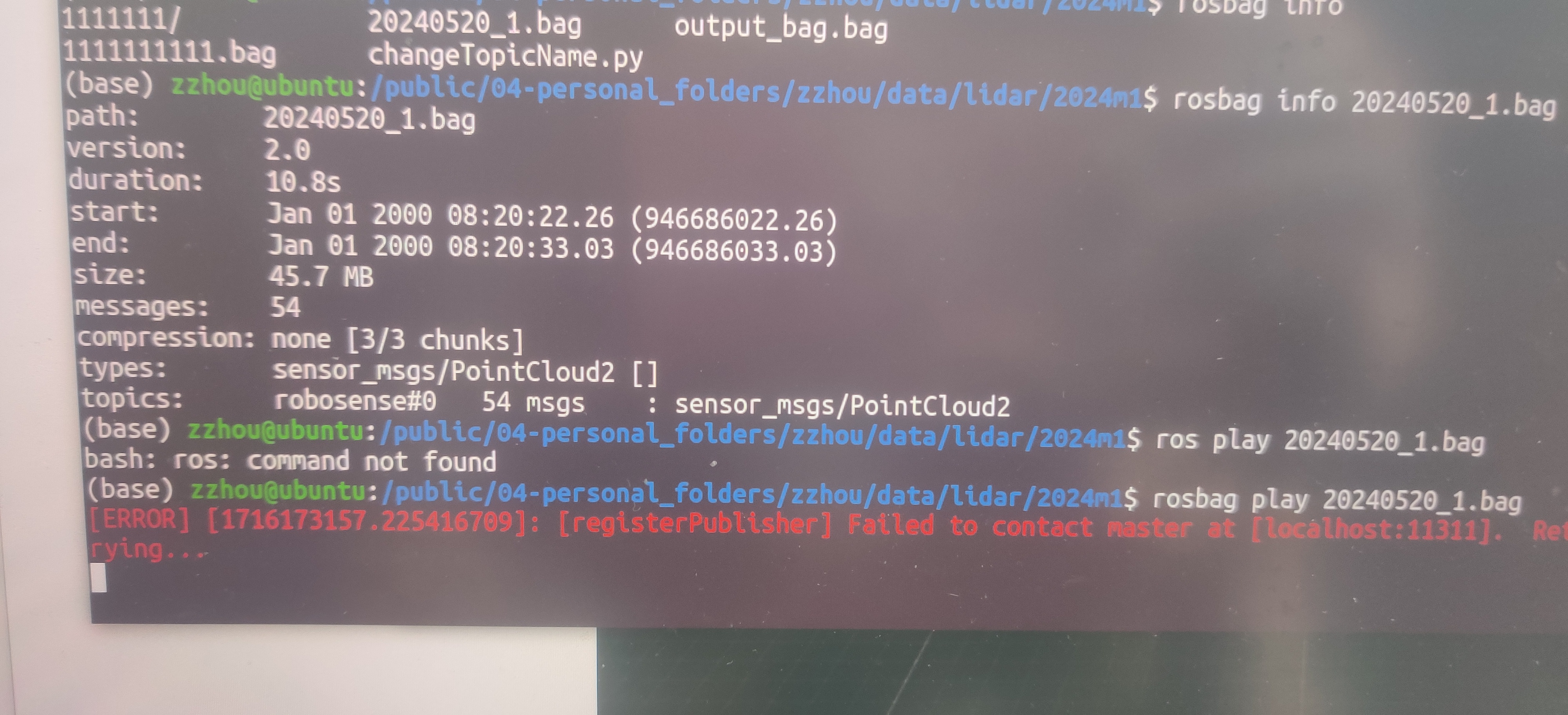
首先是查看转成后的bag信息:
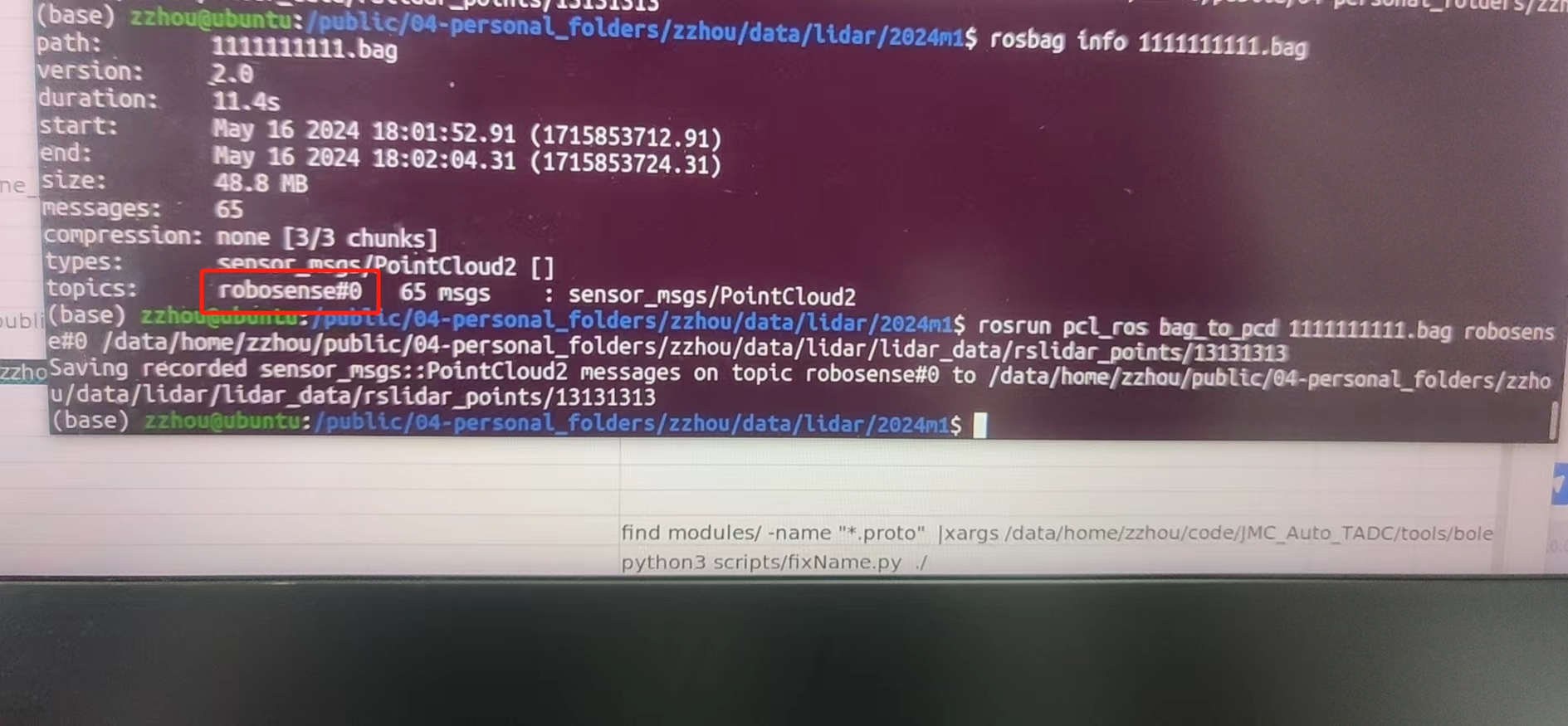
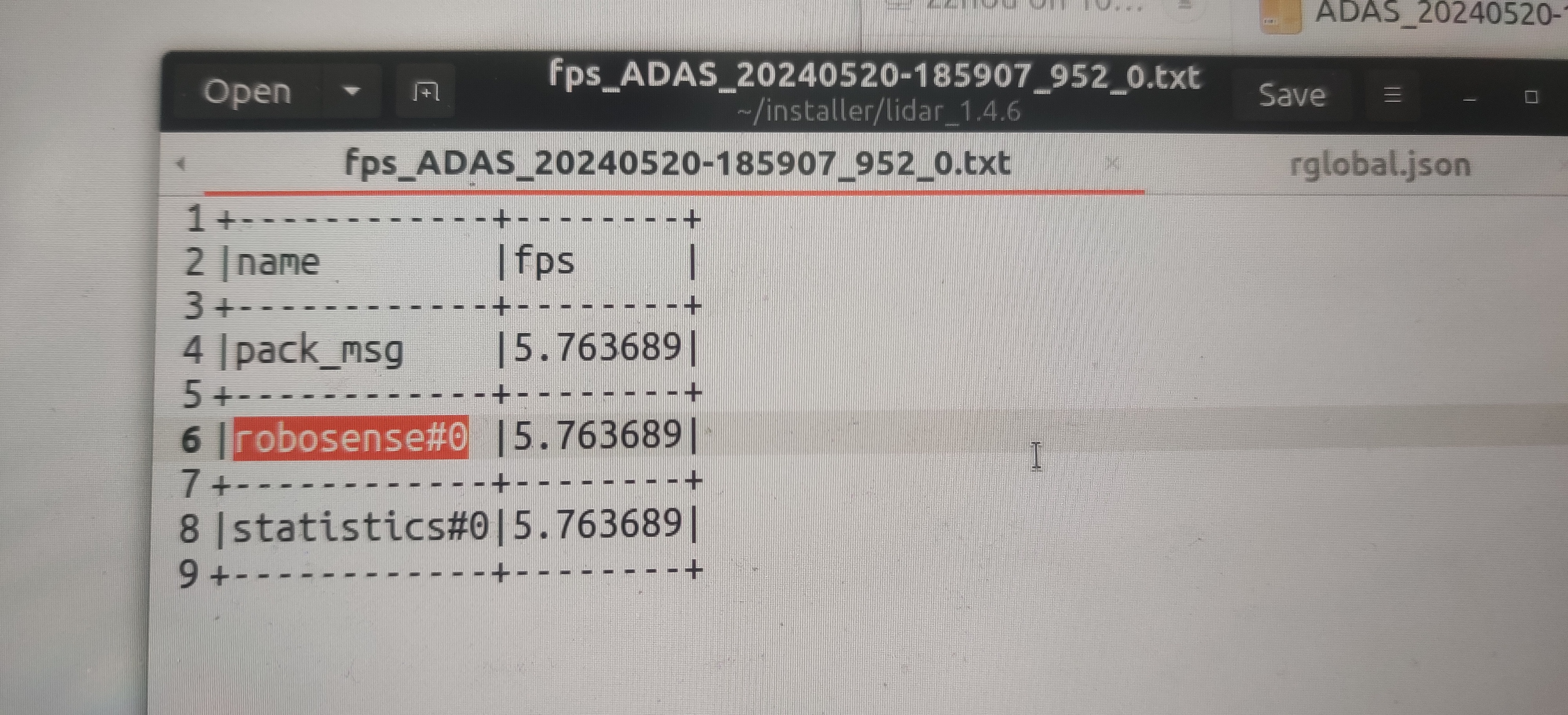
不知为何我命名的topicname由“robosense”变成了“robosense#0”,通过ros play发现其不符合命名规则:
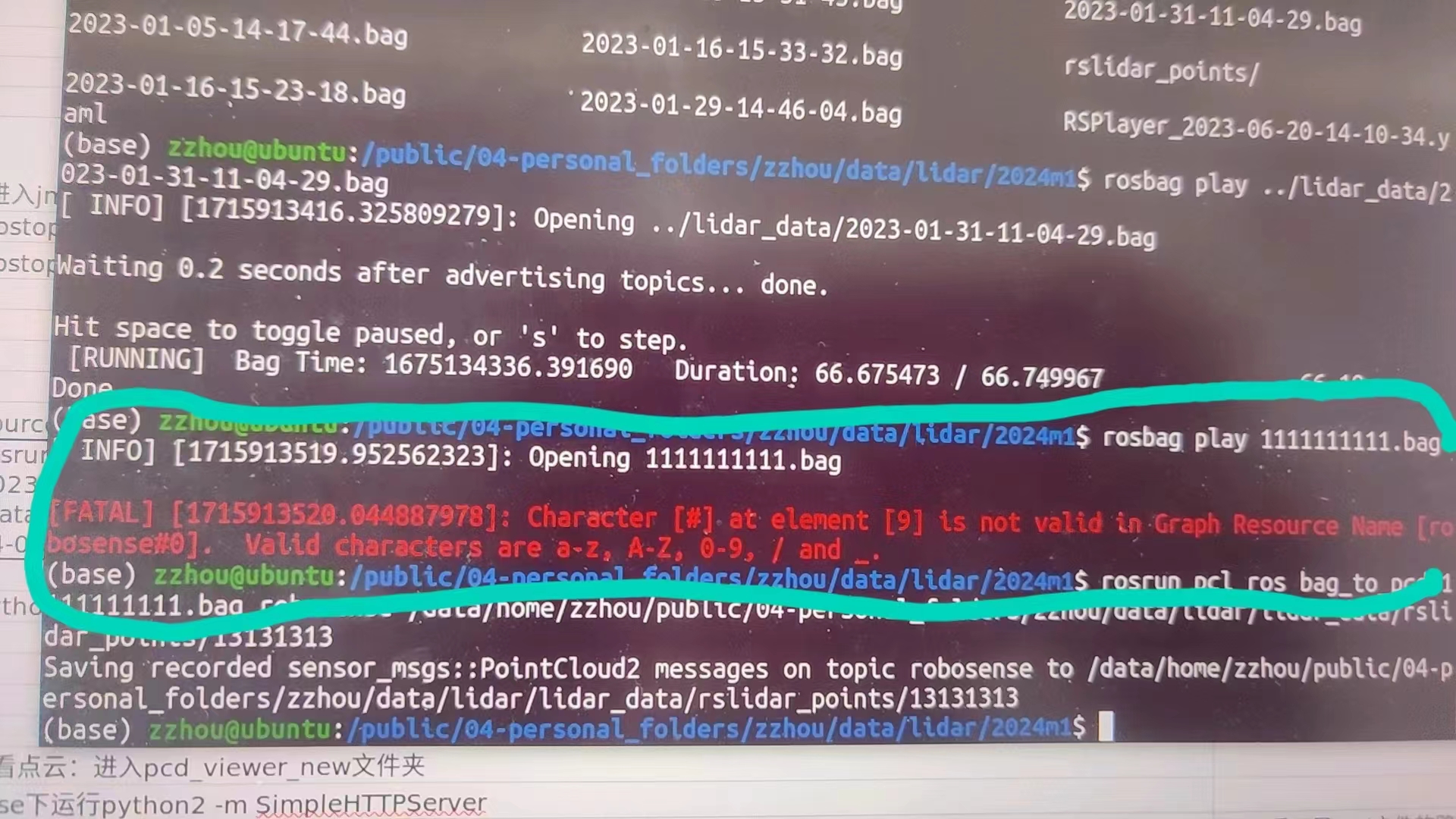
同时我直接用rosrun pcl_ros bag_to_pcd命令转pcd发现确实也失败了(如上图,输出的文件夹是空的)。于是我准备先用python脚本修改topicname
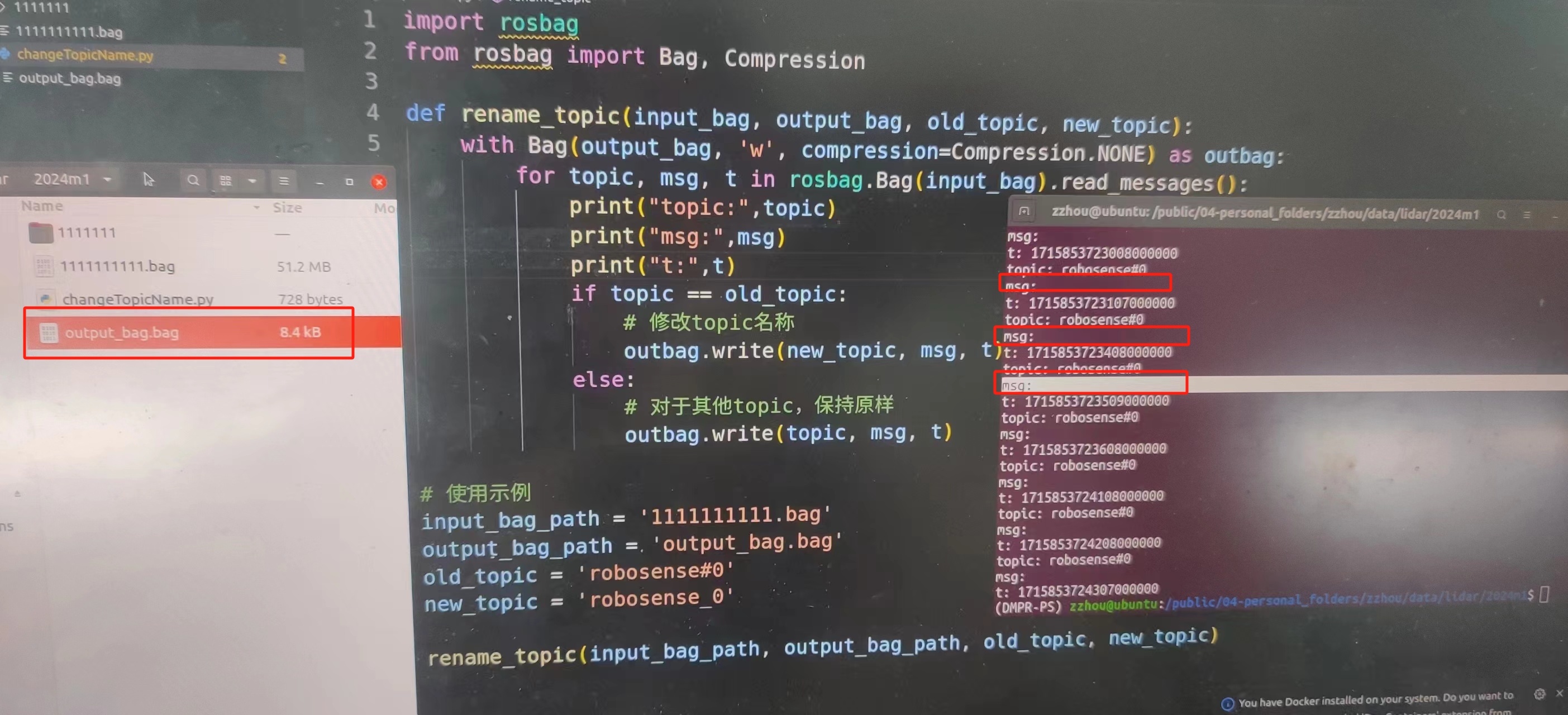
发现msg打印的消息为空(我用别的bag文件试是有数据打印的),且转出来的新bag文件非常小,还是有问题。
请大佬帮忙查看问题,我需要将bag文件解析成一帧一帧的pcd格式的数据,感谢
ps:以上所有命令和脚本我均在先前用ros录制的bag文件上试了,均可以成功,所以可以基本排除是命令行和脚本本身的问题。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
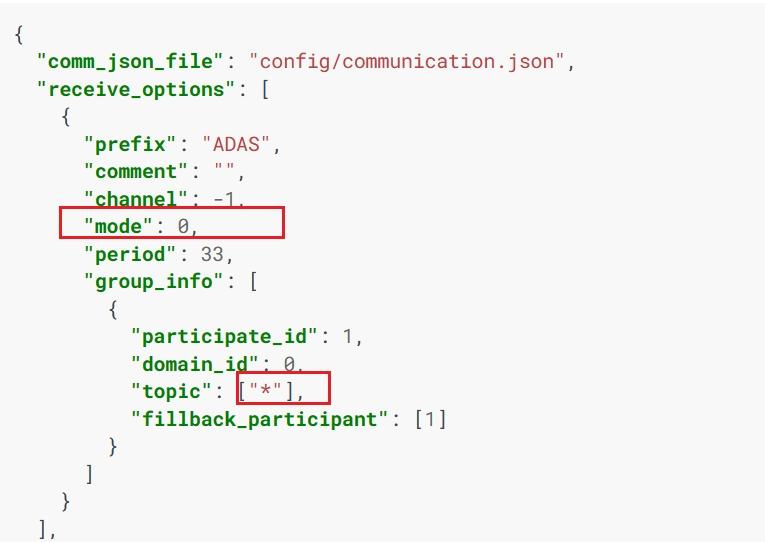
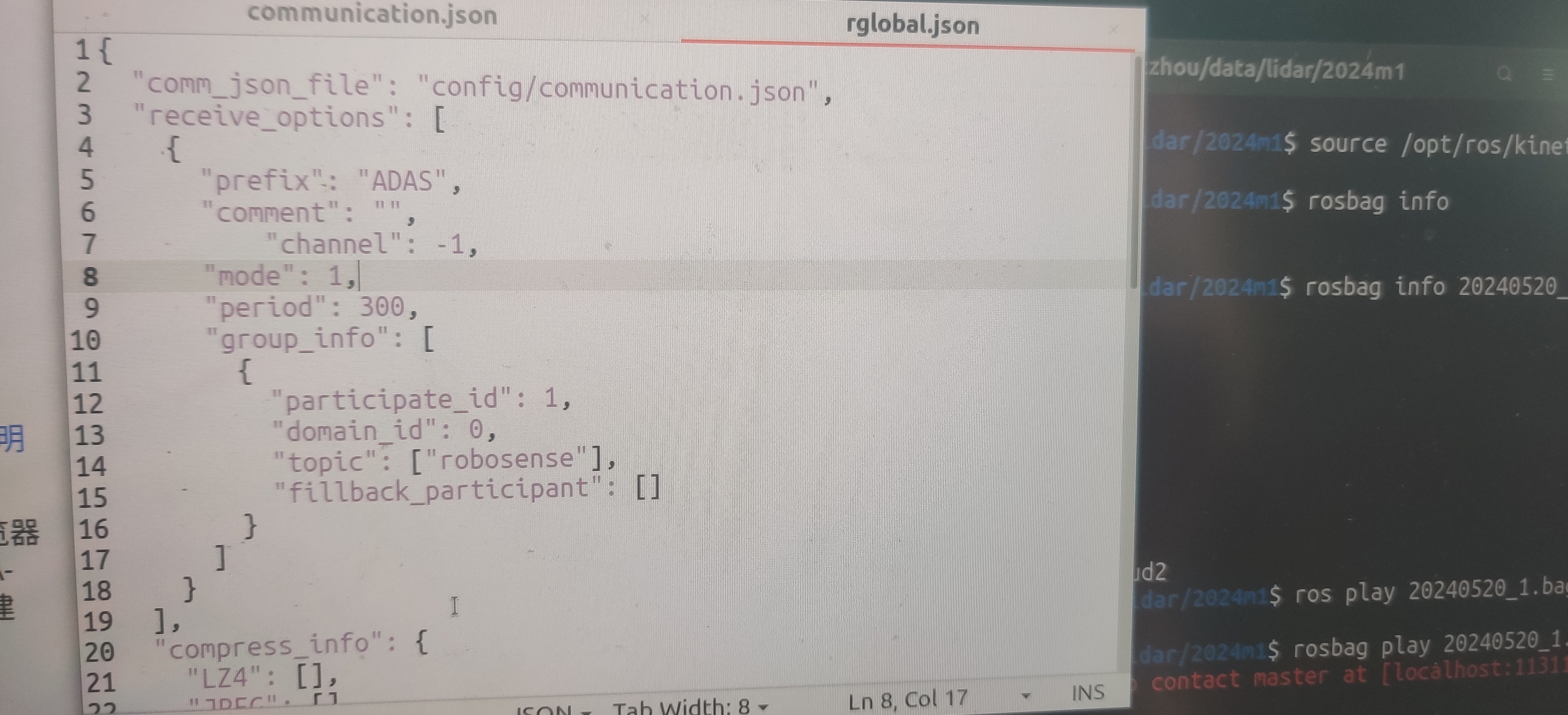
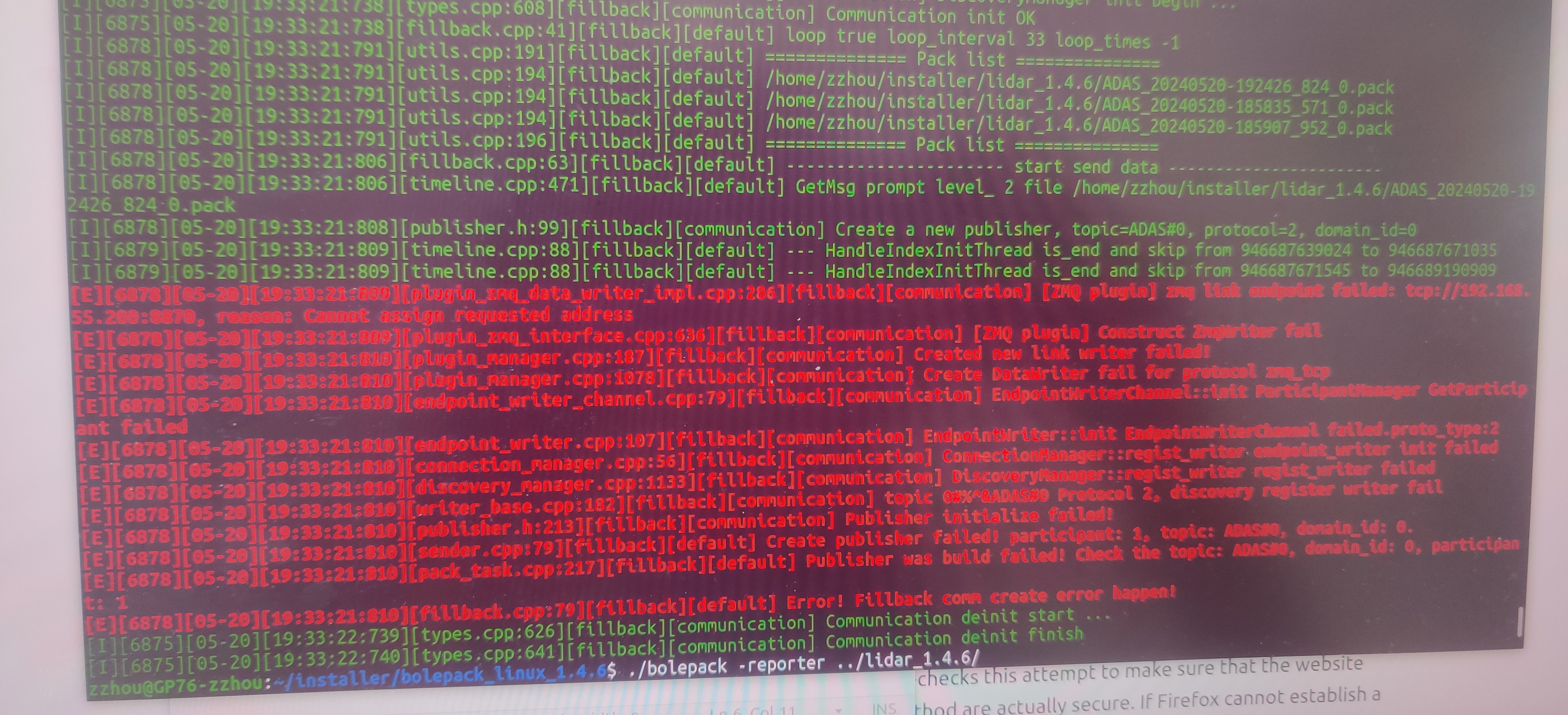
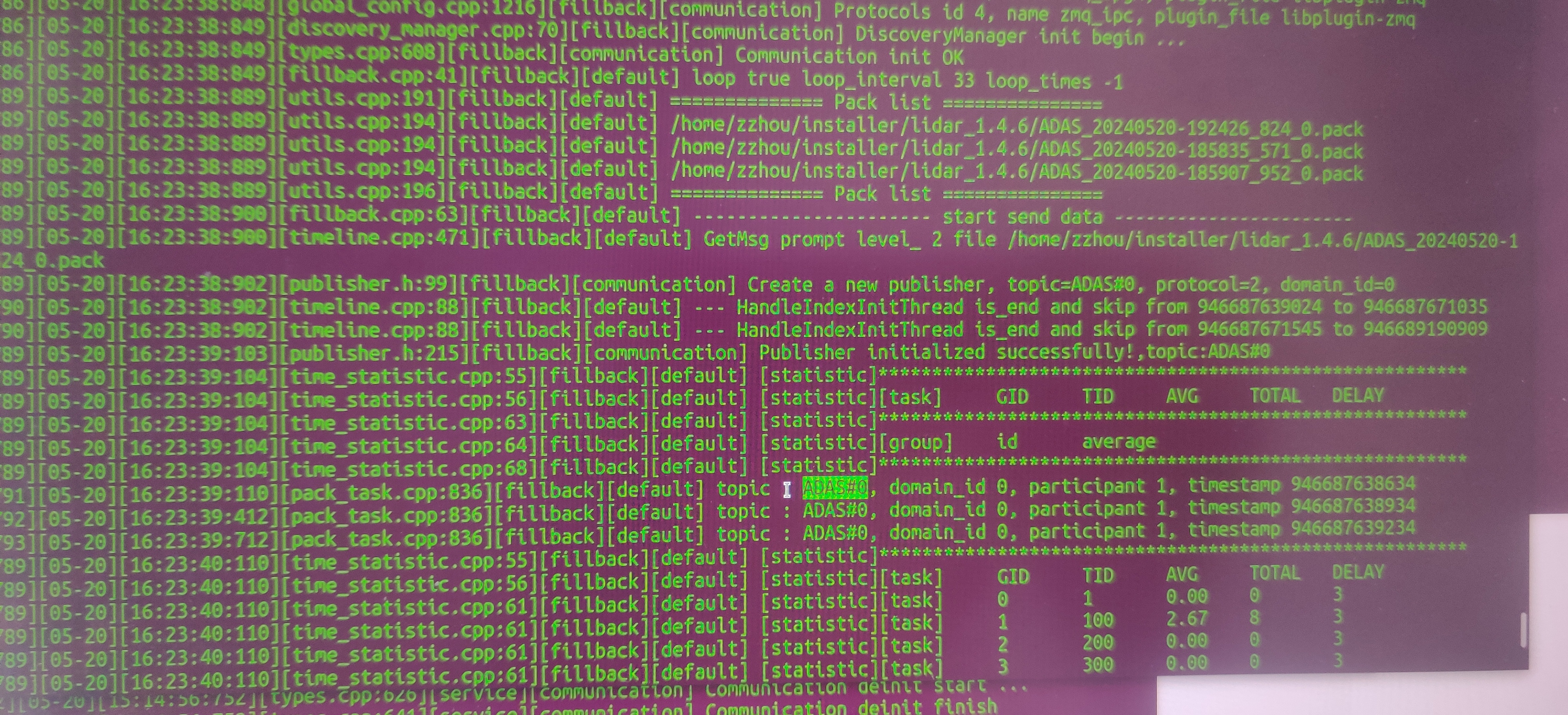 但是topicname怎么是ADAS#0?我明明写的是robosense,还有就是回放后我用hviz无法可视化,不管是用robosense还是robosense#0还是ADAS还是ADAS#0做为topicname都无法可视化
但是topicname怎么是ADAS#0?我明明写的是robosense,还有就是回放后我用hviz无法可视化,不管是用robosense还是robosense#0还是ADAS还是ADAS#0做为topicname都无法可视化