TROS-SDK-1.5.6
J5 BSP版本:platform_sdk_20221018
通过说明文档,配置.json,其具体参数如下:
sensor_global.json
{
"Sensors": [
{
"sensor_name": "dummy_sensor",
"plugin_info": {
"libraries": [
"./lib/libdummy_sensor.so"
],
"property_file": "dummy_sensor/dummy_sensor.json",
"class_name": "DummySensor"
},
"frame_adapter_name": [
"dummy_sensor"
],
"raw_adapter_name": [
"dummy_sensor_raw"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 1,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": false
},
{
"sensor_name": "lidar_0",
"plugin_info": {
"libraries": [
"./lib/libpandar128.so"
],
"class_name": "Pandar128",
"property_file": "lidar/pandar128_roof.json"
},
"frame_adapter_name": [
"lidar_0"
],
"raw_adapter_name": [
"lidar_raw_0"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "eth",
"packet_buffer_count": 100,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode": 0,
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"eth": {
"max_packet_size": 1500,
"buffer_size": 1024,
"buffer_size_commit": "socket recv buffer size,unit KB",
"network_protocol": "udp",
"Network protocol_comment": "tcp/udp",
"system_read_timeout_ms": 10000,
"src_ip": "192.168.1.201",
"dest_ip": "192.168.1.102",
"port": [
2368,
10110
]
},
"raw_socket": {
"src_ip": "192.168.1.201",
"port": [
2368,
10110
],
"block_timeout_ms": 2,
"block_num": 128,
"network_card": "eth0"
}
},
"enable": false
},
{
"sensor_name": "lidar_0",
"plugin_info": {
"libraries": [
"./lib/libat128.so"
],
"class_name": "At128",
"property_file": "lidar/at128_front.json"
},
"frame_adapter_name": [
"lidar_0"
],
"raw_adapter_name": [
"lidar_raw_0"
],
"raw_adapter_name_commit": "support multi-topic msg receive in feedback_mode",
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "eth",
"packet_buffer_count": 100,
"hal_read_timeout_mode": 0,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"eth": {
"max_packet_size": 1500,
"buffer_size": 1024,
"buffer_size_commit": "socket recv buffer size,unit KB",
"network_protocol": "udp",
"Network protocol_comment": "tcp/udp",
"system_read_timeout_ms": 10000,
"src_ip": "192.168.1.204",
"dest_ip": "192.168.1.102",
"port": [
2371,
10000
]
},
"raw_socket": {
"src_ip": "192.168.1.204",
"port": [
2371,
10000
],
"block_timeout_ms": 2,
"block_num": 128,
"network_card": "eth0"
}
},
"enable": false
},
{
"sensor_name": "lidar_1",
"plugin_info": {
"libraries": [
"./lib/librobosense_m1.so"
],
"property_file": "lidar/robosenseM1_front.json",
"class_name": "RobosenseM1"
},
"frame_adapter_name": [
"lidar_1"
],
"raw_adapter_name": [
"lidar_raw_1"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "eth",
"packet_buffer_count": 100,
"hal_read_timeout_mode": 0,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"eth": {
"max_packet_size": 1500,
"buffer_size": 1024,
"buffer_size_commit": "socket recv buffer size,unit KB",
"network_protocol": "udp",
"Network protocol_comment": "tcp/udp",
"system_read_timeout_ms": 10000,
"src_ip": "192.168.1.200",
"dest_ip": "192.168.1.102",
"port": [
6699,
7788
]
},
"raw_socket": {
"src_ip": "192.168.1.200",
"port": [
2368,
10110
],
"block_timeout_ms": 2,
"block_num": 128,
"network_card": "eth0"
}
},
"enable": false
},
{
"sensor_name": "radar_0",
"plugin_info": {
"libraries": [
"./lib/libradar.so"
],
"property_file": "radar/radar_0.json",
"class_name": "RadarDrv"
},
"frame_adapter_name": [
"radar_0"
],
"raw_adapter_name": [
"radar_raw_0"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": false
},
{
"sensor_name": "radar_1",
"plugin_info": {
"libraries": [
"./lib/libradar.so"
],
"property_file": "radar/radar_1.json",
"class_name": "RadarDrv"
},
"frame_adapter_name": [
"radar_1"
],
"raw_adapter_name": [
"radar_raw_1"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": false
},
{
"sensor_name": "camera_0",
"plugin_info": {
"libraries": [
"./lib/libcamera.so"
],
"property_file": "camera/camera_0.json",
"class_name": "Camera"
},
"frame_adapter_name": [
"camera_0"
],
"raw_adapter_name": [
"camera_image_0"
],
"group_info": {
"group_adapter_name": "camera_0",
"group_adapter_name_commit": "If the group_adapter_name is the same as the frame_adapter_name, pub msg from this sensor",
"group_id": 0,
"group_sync_timeout": 50,
"group_sync_timeout_commit": "get vio data timeout for sync-mult-chan, unit ms",
"group_sync_difftime": 10,
"group_sync_difftime_commit": "If the time difference is less than the set value, sync success, unit ms",
"group_sync_mode": 0,
"group_sync_mode_commit": "0:msg without sync, 1:discard the no sync frame, 2:interpolation the no sync frame",
"group_enable": false,
"group_enable_commit": "group frame switch"
},
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": true
},
{
"sensor_name": "camera_1",
"plugin_info": {
"libraries": [
"./lib/libcamera.so"
],
"property_file": "camera/camera_1.json",
"class_name": "Camera"
},
"frame_adapter_name": [
"camera_1"
],
"raw_adapter_name": [
"camera_image_1"
],
"group_info": {
"group_adapter_name": "camera_0",
"group_adapter_name_commit": "If the group_adapter_name is the same as the frame_adapter_name, pub msg from this sensor",
"group_id": 0,
"group_enable": true,
"group_enable_commit": "group frame switch"
},
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": false
},
{
"sensor_name": "camera_2",
"plugin_info": {
"libraries": [
"./lib/libcamera.so"
],
"property_file": "camera/camera_2.json",
"class_name": "Camera"
},
"frame_adapter_name": [
"camera_2"
],
"raw_adapter_name": [
"camera_image_2"
],
"group_info": {
"group_adapter_name": "camera_0",
"group_adapter_name_commit": "If the group_adapter_name is the same as the frame_adapter_name, pub msg from this sensor",
"group_id": 0,
"group_enable": false,
"group_enable_commit": "group frame switch"
},
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": false
},
{
"sensor_name": "camera_3",
"plugin_info": {
"libraries": [
"./lib/libcamera.so"
],
"property_file": "camera/camera_3.json",
"class_name": "Camera"
},
"frame_adapter_name": [
"camera_3"
],
"raw_adapter_name": [
"camera_image_3"
],
"group_info": {
"group_adapter_name": "camera_0",
"group_adapter_name_commit": "If the group_adapter_name is the same as the frame_adapter_name, pub msg from this sensor",
"group_id": 0,
"group_enable": false,
"group_enable_commit": "group frame switch"
},
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": false
},
{
"sensor_name": "gnss_0",
"plugin_info": {
"libraries": [
"./lib/libf9k.so"
],
"property_file": "gps/gnss_0.json",
"class_name": "F9kGnss"
},
"frame_adapter_name": [
"gnss_0"
],
"raw_adapter_name": [
"gnss_raw_0"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "uart",
"packet_buffer_count": 1000,
"hal_read_timeout_mode": 1,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"uart": {
"dev_node": "/dev/ttyS3",
"baud_rate": 921600,
"system_read_timeout_ms": 100,
"max_packet_size": 128
}
},
"enable": false
},
{
"sensor_name": "gnss_1",
"plugin_info": {
"libraries": [
"./lib/libub482.so"
],
"property_file": "gps/gnss_1.json",
"class_name": "UB482"
},
"frame_adapter_name": [
"gnss_1"
],
"raw_adapter_name": [
"gnss_raw_1"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "uart",
"packet_buffer_count": 1000,
"hal_read_timeout_mode": 1,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"uart": {
"dev_node": "/dev/ttyUSB0",
"baud_rate": 115200,
"system_read_timeout_ms": 100,
"max_packet_size": 128
}
},
"enable": false
},
{
"sensor_name": "imu_0",
"plugin_info": {
"libraries": [
"./lib/libf9k.so"
],
"property_file": "imu/imu_0.json",
"class_name": "F9kImu"
},
"frame_adapter_name": [
"imu_0"
],
"raw_adapter_name": [
"imu_raw_0"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "uart",
"packet_buffer_count": 1000,
"hal_read_timeout_mode": 1,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"uart": {
"dev_node": "/dev/ttyS3",
"baud_rate": 921600,
"system_read_timeout_ms": 100,
"max_packet_size": 128
}
},
"enable": false
},
{
"sensor_name": "imu_1",
"plugin_info": {
"libraries": [
"./lib/libf9k.so"
],
"property_file": "imu/imu_1.json",
"class_name": "F9kImu"
},
"frame_adapter_name": [
"imu_1"
],
"raw_adapter_name": [
"imu_raw_1"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "uart",
"packet_buffer_count": 1000,
"hal_read_timeout_mode": 1,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"uart": {
"dev_node": "/dev/ttyS3",
"baud_rate": 921600,
"system_read_timeout_ms": 100,
"max_packet_size": 128
}
},
"enable": false
},
{
"sensor_name": "imu_2",
"plugin_info": {
"libraries": [
"./lib/libiam20685.so"
],
"property_file": "imu/imu_2.json",
"class_name": "Iam20685"
},
"frame_adapter_name": [
"imu_2"
],
"raw_adapter_name": [
"imu_raw_2"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "event",
"packet_buffer_count": 100,
"hal_read_timeout_mode": 1,
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"event": {
"sysfs_path": "/sys/devices/virtual/input/iam20685-accel",
"iam_odr_hz": 50
}
},
"enable": false
},
{
"sensor_name": "imu_3",
"plugin_info": {
"libraries": [
"./lib/libasm330.so"
],
"property_file": "imu/imu_3.json",
"class_name": "ASM330"
},
"frame_adapter_name": [
"imu_3"
],
"raw_adapter_name": [
"imu_raw_3"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "spi",
"packet_buffer_count": 100,
"hal_read_timeout_mode": 1,
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"spi": {
"max_packet_size": 128,
"dev_node": "/dev/spidev3.0",
"speeds": 10000000,
"mode": 0,
"bits_per_word": 8
}
},
"enable": false
},
{
"sensor_name": "uss_0",
"plugin_info": {
"libraries": [
"./lib/libuss.so"
],
"property_file": "uss/uss_0.json",
"class_name": "USS"
},
"frame_adapter_name": [
"uss_0"
],
"raw_adapter_name": [
"uss_raw_0"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"hal_info": {
"hw_type": "eth",
"packet_buffer_count": 100,
"hal_read_timeout_mode": 1,
"hal_clear_buffer_flag": true,
"hal_clear_buffer_flag_commit": "clear input buffer when start, true:clear buffer, false:do not clear buffer",
"hal_read_timeout_mode_commit": "packet trigger mode: 0:check every 1ms with sleep, 1:condition notice",
"hal_read_timeout_ms": 1000,
"hal_read_timeout_ms_commit": "when ring buffer is empty,wait time(ms)",
"eth": {
"max_packet_size": 2048,
"network_protocol": "tcp",
"Network protocol_comment": "tcp/udp",
"system_read_timeout_ms": 1000,
"src_ip": "192.168.2.50",
"dest_ip": "127.0.0.1",
"port": [
7600
]
}
},
"enable": false
},
{
"sensor_name": "mic_0",
"plugin_info": {
"libraries": [
"./lib/libmic.so"
],
"property_file": "mic/mic_0.json",
"class_name": "MIC"
},
"frame_adapter_name": [
"mic_0"
],
"raw_adapter_name": [
"mic_raw_0"
],
"run_mode": {
"run_mode_type": 0,
"run_mode_type_commit": "0: online_mode, 1: feedback_mode",
"online_mode": {
"ts_src": 1,
"ts_src_commit": "sync_ts source, 0:sensor, 1:os",
"raw_msg_enable": false,
"raw_msg_enable_commit": "save raw data which has not processed for recording file"
},
"feedback_mode": {
"ts_src": 2,
"ts_src_commit": "msg param source, 1:os, 2:pack",
"feedback_msg_mode": 0,
"feedback_msg_mode_commit": "feedback mode, 0:pub_sub, 1:req_rep"
}
},
"enable": false
}
],
"heartbeat": {
"enable": false,
"heartbeat_adapter_name": "/bole/heartbeat/sensors",
"period_ms": 1000
},
"sched_policy_enhancement": {
"enable": false,
"sched_policy": 2,
"sched_policy_commit": "set scheduling policy,1:SCHED_FIFO,2:SCHED_RR",
"sched_priority": -1,
"sched_priority_commit": "set scheduling priority,-1:highest priority,1:lowest priority,2:priority value(0-99),The higher value, the higher priority",
"sched_policy_effective_mode": 1,
"sched_policy_effective_mode_commit": "the mode of effective of scheduling policy,0:thread,1:process"
},
"fps_control": {
"enable": false,
"fps_control_adapter_name": [
"camera_0",
"camera_1"
],
"fps": [
10,
20
]
},
"monitor_timeout_ms": 10000,
"fps_print_interval_ms": 3000,
"diag_adapter_name": "/bole/event/sensors",
"command_adapter_name": "/bole/command/sensors",
"communication_path": "adapter/communication.json",
"adapter_path": "adapter/adapter.json",
"adapter_path_comment": "absolute path for adapter.json",
"time_cost_en": false,
"process_name": "sensor_center",
"schedule_group_path": "../sensor_center_module/schedule_config.json",
"save_backtrace": false,
"log_mode": 0,
"log_mode_comment": "0-file sink, 1-tmg sink, 2-sd sink",
"log_file_save_path": "./sensor_centor.log",
"log_dump_path": "./log/",
"log_file_count": 5,
"log_file_size": 10,
"log_level": 2
}
adapter.json
{
"adapter_message": [
{
"adapter_name": "/bole/heartbeat/sensors",
"topic_name": "/bole/heartbeat/sensors",
"enable_pub": true,
"enable_sub": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 3,
"enable": false
},
{
"adapter_name": "/bole/event/sensors",
"topic_name": "/bole/event/sensors",
"enable_pub": true,
"enable_sub": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "0 is hybrid, 2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"enable": true
},
{
"adapter_name": "/bole/command/sensors",
"topic_name": "/bole/command/sensors",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "0 is hybrid, 2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 2,
"enable": true
},
{
"adapter_name": "dummy_sensor",
"topic_name": "dummy_sensor",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "0 is hybrid, 2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "dummy_sensor",
"topic_name": "dummy_sensor",
"enable_pub": false,
"enable_sub": false,
"enable_client": true,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "0 is hybrid, 2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 8,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "dummy_sensor_raw",
"topic_name": "dummy_sensor#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "0 is hybrid, 2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "dummy_sensor_raw",
"topic_name": "dummy_sensor#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "0 is hybrid, 2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "lidar_0",
"topic_name": "lidar_0",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "0 is hybrid, 2 is zmq_tcp, 4 is zmq_ipc, 6 is shared-memory",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "lidar_raw_0",
"topic_name": "lidar_raw_0#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "lidar_raw_1",
"topic_name": "lidar_raw_1#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 5,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "lidar_raw_0",
"topic_name": "lidar_raw_0#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "lidar_1",
"topic_name": "lidar_1",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc, 6 is shared_memory",
"messagenum": 8,
"participantattr": 1,
"participantattr_comment": "-1 is without participantattr",
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "lidar_raw_1",
"topic_name": "lidar_raw_1#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "lidar_raw_1",
"topic_name": "lidar_raw_1#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "radar_0",
"topic_name": "radar_0",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "radar_raw_0",
"topic_name": "radar_raw_0#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "radar_raw_0",
"topic_name": "radar_raw_0#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "camera_0",
"topic_name": "camera_0",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "6 is shared-memory",
"messagenum": 1,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": true
},
{
"adapter_name": "camera_0",
"topic_name": "camera_0",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "6 is shared-memory",
"messagenum": 1,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "camera_image_0",
"topic_name": "camera_image_0#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 2,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "camera_image_0",
"topic_name": "camera_image_0#0",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 0,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "camera_image_0",
"topic_name": "camera_image_0#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "camera_1",
"topic_name": "camera_1",
"enable_pub": true,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 1,
"messagetrantype_comment": "1 is inter-commnication",
"messagenum": 1,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "gnss_0",
"topic_name": "/sensor/gnss",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "gnss_raw_0",
"topic_name": "gnss_raw_0#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "gnss_raw_0",
"topic_name": "gnss_raw_0#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "gnss_1",
"topic_name": "/sensor/gnss",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "imu_0",
"topic_name": "/sensor/imu",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "imu_raw_0",
"topic_name": "imu_raw_0#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "imu_raw_0",
"topic_name": "imu_raw_0#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "imu_1",
"topic_name": "/sensor/imu",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "imu_2",
"topic_name": "/sensor/imu",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "imu_3",
"topic_name": "/sensor/imu",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "uss_0",
"topic_name": "uss_0",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "uss_raw_0",
"topic_name": "uss_raw_0#0",
"enable_pub": false,
"enable_sub": true,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 4,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "uss_raw_0",
"topic_name": "uss_raw_0#0",
"enable_pub": false,
"enable_sub": false,
"enable_client": false,
"enable_service": true,
"messagedomainid": 0,
"messagetrantype": 2,
"messagetrantype_comment": "2 is zmq_tcp, 4 is zmq_ipc",
"messagenum": 20,
"participantattr": 3,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
},
{
"adapter_name": "mic_0",
"topic_name": "mic_0",
"enable_pub": true,
"enable_sub": false,
"enable_client": false,
"enable_service": false,
"messagedomainid": 0,
"messagetrantype": 2,
"messagenum": 20,
"participantattr": 1,
"plugin_info": {
"class_name": "hobot::sensors::Adapter"
},
"enable": false
}
]
}
communication.json
{
"log_level": "info",
"tool_switch": 0,
"shm_option": {
"shm_size": "100M",
"block_size": "1M",
"hbmem_hold_timout_ms" : 10,
"hbmem_hold_com_buf": 0
},
"supported_protocols": [
{
"enable": 1,
"protocol_type": 2,
"protocol_name": "zmq_tcp",
"is_in_hybrid": 1,
"plugin_file": "libplugin-zmq"
}
],
"discovery_option": {
"discovery_enable": 1,
"cross_different_subnets": 0,
"default_eth": "",
"port_range": "10100-10200",
"multicast_domain": ""
},
"participants": [
{
"id": 1,
"protocol": "zmq_tcp",
"link_info": "127.0.0.1:8870",
"link_type": ""
},
{
"id": 2,
"protocol": "zmq_tcp",
"link_info": "0.0.0.0:5560",
"link_type": "bind",
"link_options": {
"read_failed_times_to_reconnect": -1
}
},
{
"id": 3,
"protocol": "zmq_tcp",
"link_info": "192.168.1.12:8871",
"link_type": "bind"
},
{
"id": 4,
"protocol": "zmq_tcp",
"link_info": "127.0.0.1:2111",
"link_type": "bind"
},
{
"id": 5,
"protocol": "zmq_tcp",
"link_info": "10.64.61.210:8872",
"link_type": "connect"
},
{
"id": 6,
"protocol": "zmq_tcp",
"link_info": "0.0.0.0:5906",
"link_type": "connect"
},
{
"id": 7,
"protocol": "zmq_tcp",
"link_info": "0.0.0.0:5906",
"link_type": "bind"
},
{
"id": 8,
"protocol": "zmq_tcp",
"link_info": "127.0.0.1:3344",
"link_type": "connect",
"link_options": {
"read_failed_times_to_reconnect": -1
}
}
]
}
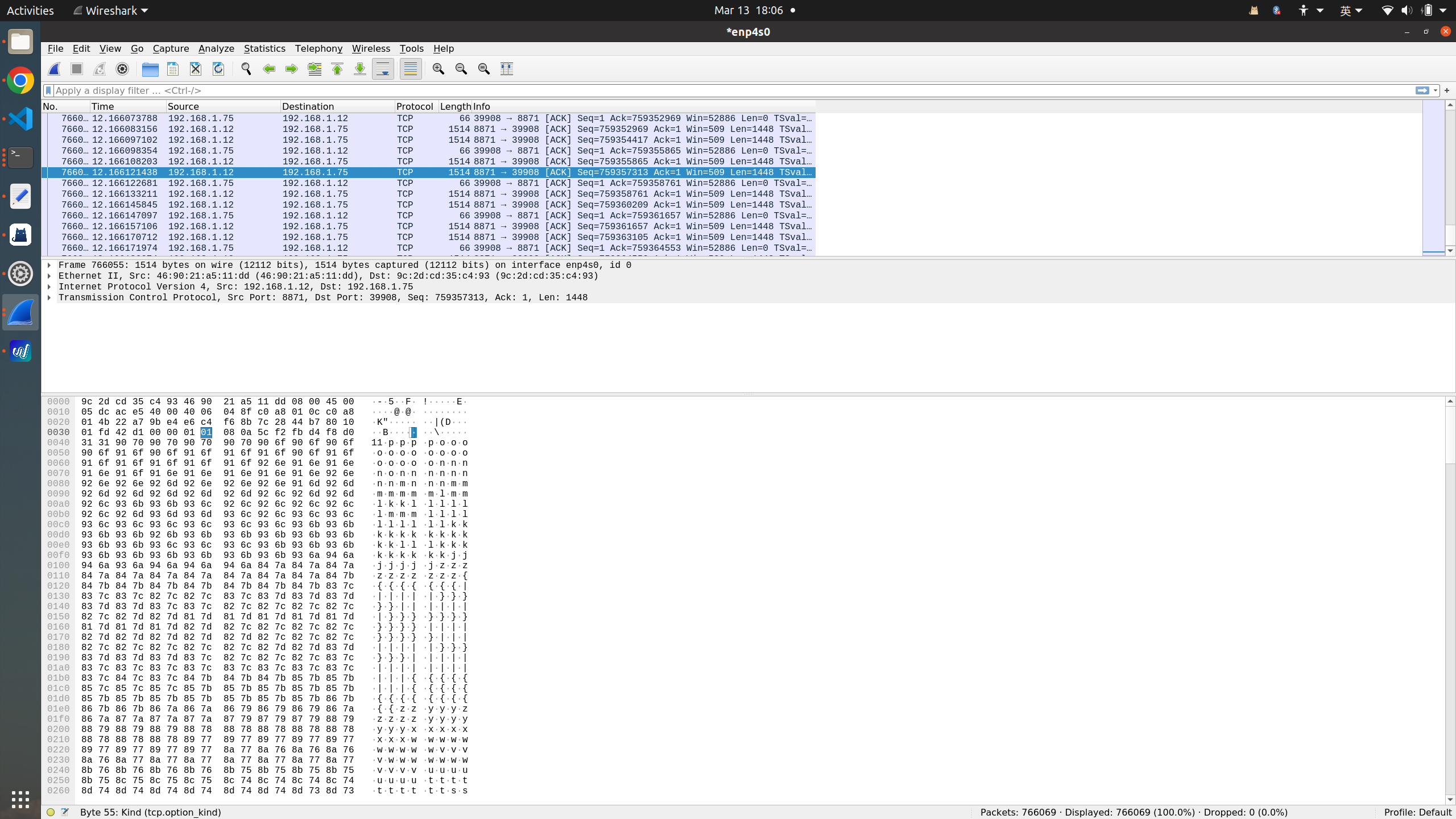
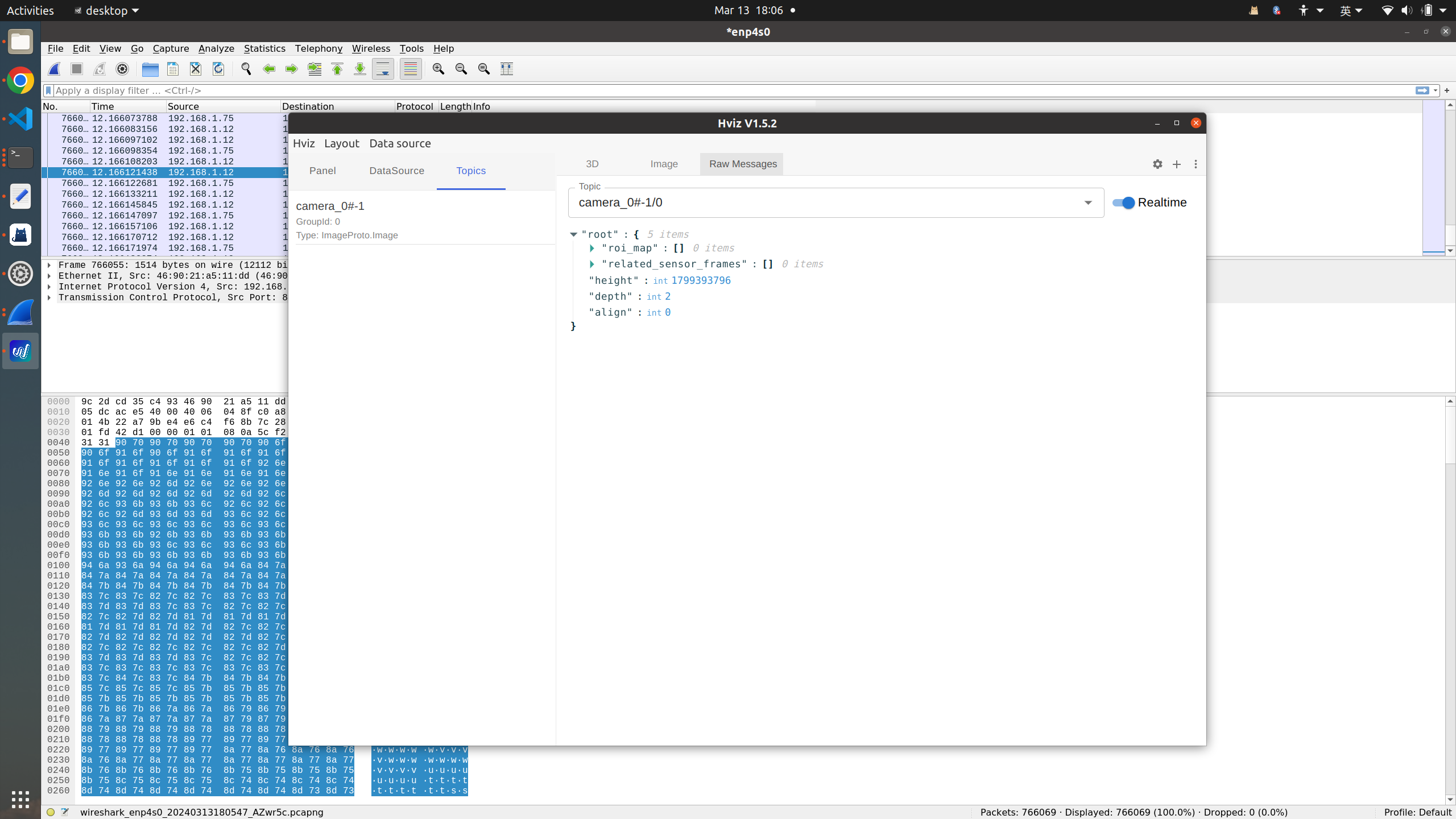
当前的问题是,板端至上位机,用wireshark抓包是有信息传输的,但是好像都是些测试数据,通过配置HVIZ,HVIZ能看到话题信息,但是解析的数据好像不太对,其中height项的数更像是时间戳信息,然后在HVIZ端无法出图,windows和linux版的HVIZ都试过,都是相同的现象。具体现象见下图:
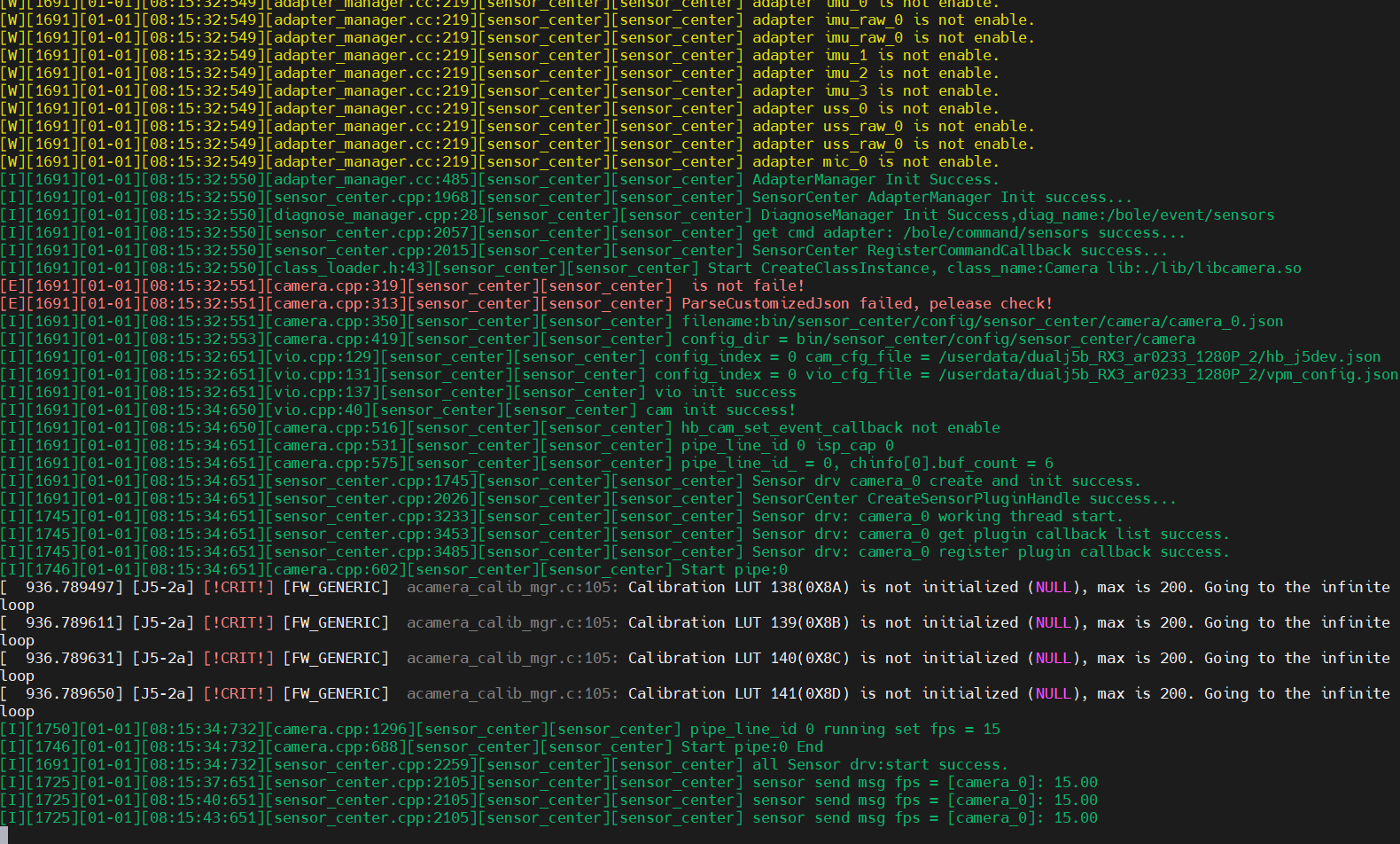
执行命令如下:
./bin/sensor_center/sensor_center bin/sensor_center/config/sensor_center/sensor_global.json
板端运行终端如下:
麻烦支持一下,谢谢!



'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)

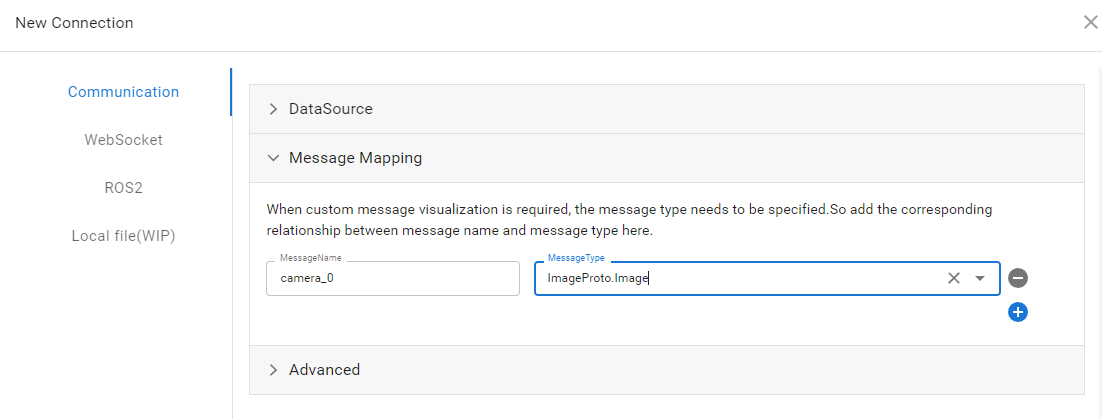
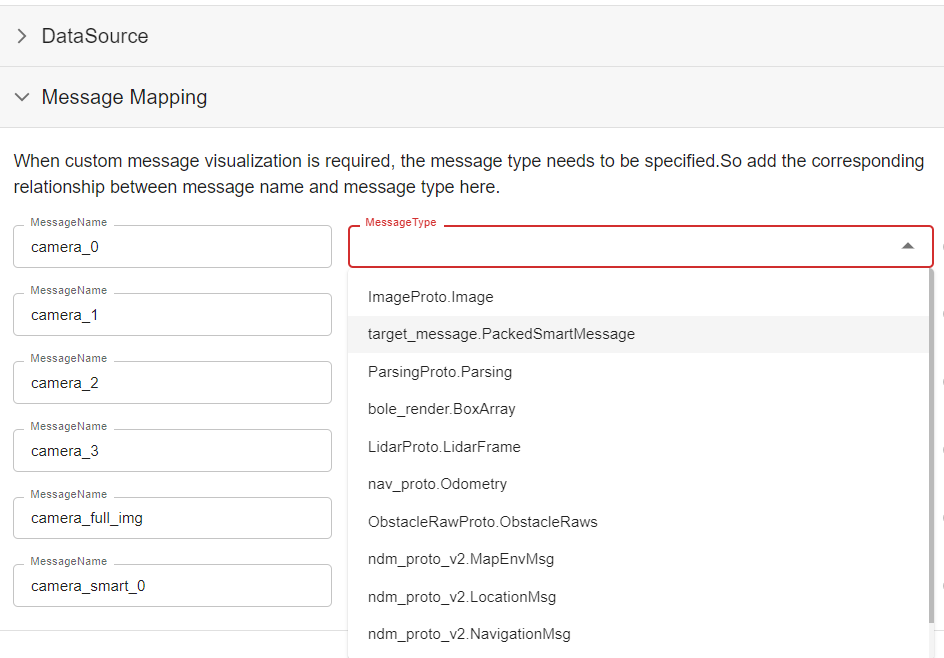 手动填CameraFrameProto.CameraFrame,报该类型未定义,我们无法确定这个地方该填什么。你们之前回复说这个地方可以不用配置?
手动填CameraFrameProto.CameraFrame,报该类型未定义,我们无法确定这个地方该填什么。你们之前回复说这个地方可以不用配置?