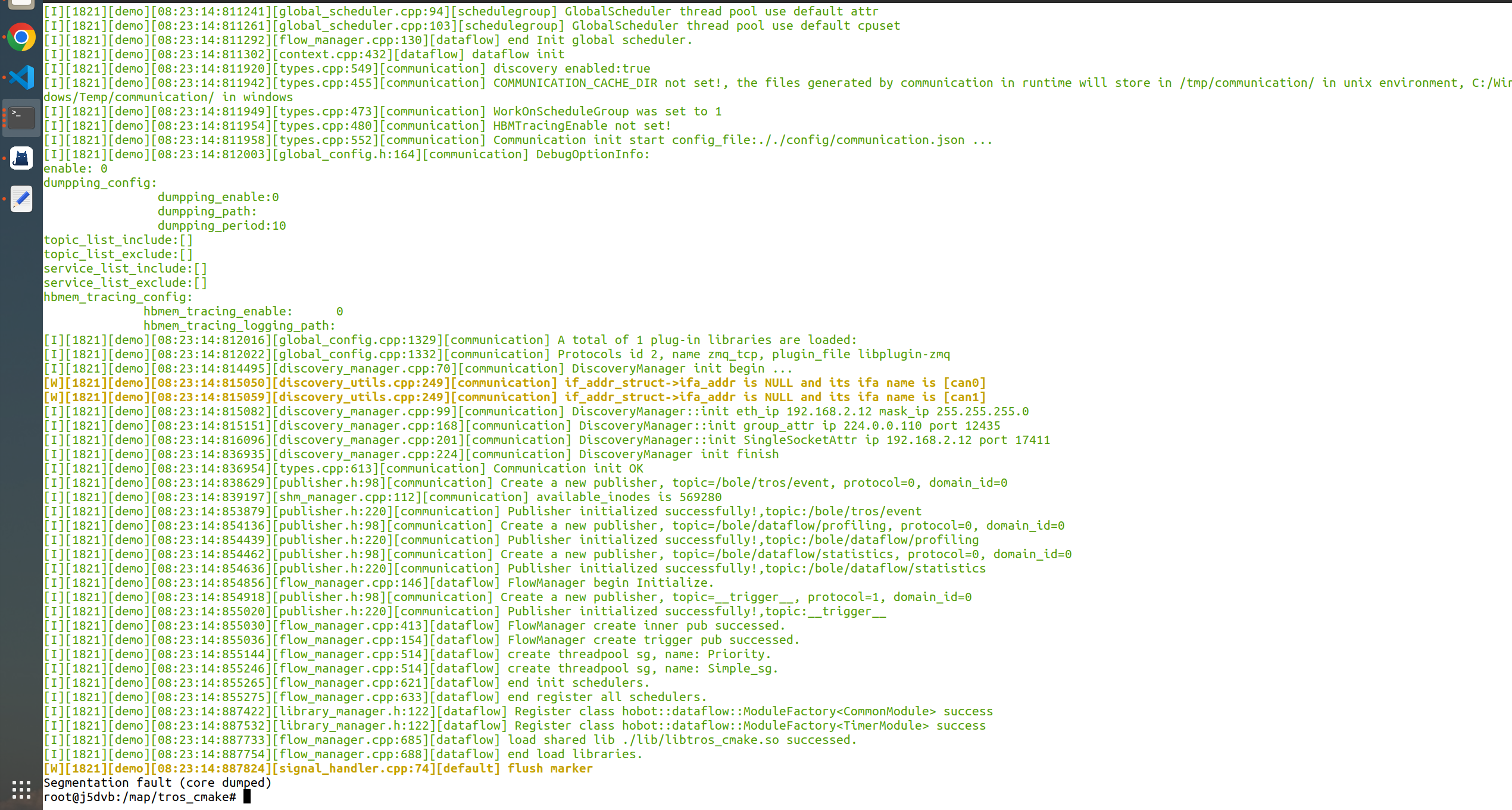
TROS.A SDK版本为1.5.6,按照TogetheROS.Auto/模块介绍/Dataflow/配套工具/pkg包管理/工程构建示例中以cmake方式构建示例工程,编译命令为 pkg build -t j5 ,在板端运行mainboard2 -c config/process.json -w .报错,信息如下。
以pkg build -t linux编译为在linux端执行时,能正常运行,请问板端是还需要配置什么吗?
谢谢!

以pkg build -t linux编译为在linux端执行时,能正常运行,请问板端是还需要配置什么吗?
谢谢!

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) Lv.3
Lv.3应该是mainboard使用的库和您创建的工程时的linux GCC版本不一致导致。
解决方案:
1 创建工程项目和编译的时候在docker中进行。
2 sdk 1.5.6的版本比较老,找对接人更新相应的sdk包。最新的版本,能兼容这个问题。

sdk 1.5.6种包含的mainboard2工具使用到的库是用哪个版本的编译器编译的呢,是不是我将linux主机的交叉编译器换成其对应版本的就好了,当前我的交叉编译器版本是gcc-ubuntu-9.3.0-2020.03-x86_64-aarch64-linux-gnu。
1.5.6 的sdk,我这边试了一下,换成相同的gcc版本编译也是有问题,可能试1.5.6当时发布的时候有点兼容性问题吧。 只有在docker中编译开发,可以正常运行,您这边如果不能更新sdk版本,建议还是使用docker来编译开发吧。
从官方下载的SDK中,里面没有对应的镜像啊,我该从哪里获得镜像呢,谢谢!
curl -O -u 'tros:tros' ftp://vrftp.horizon.ai/tros_img.tgz
这拉下来是什么版本的啊?
1.0.4的版本是不是太低了,会不会其他的问题。
curl -O -u 'tros:tros' ftp://vrftp.horizon.ai/tros_img.tgz下载下来的tros_img.tgz是镜像文件,直接用就可以了。按照部署Docker的方式使用。就可以在搭建的docker环境中创建开发对应工程。
理解了,谢谢!
Lv.3请分析一下coredump文件是啥原因?如果是缺少啥,不应该是coredump。
没有生成coredump文件,其他例程是可以跑的,是不是编译规则哪里需要调整一下呢?我看也是用交叉编译器编的。