
When deploying aerial tracking algorithms, such as HiFT[1], i find they usually use AlexNet as backbone to pursue high on-board speed.
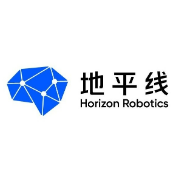
However, the first layer of AlexNet is a "conv2d" whose kernel size is 11:
So, i cannot convert this network by using current AI-tool-chain.
In addtion, changing the kernel size to 7 is not practical, because:
1. Aerial trackers use AlexNet as backbone, meaning they will load pretrained checkpoint and finetune the backbone. If change kernel size, dict-key errors will appear when loading pretrain;
2. Although i can retrain an AlexNet with kernel size 7 on ImageNet, the performance of backbone and even the aerial tracker cannot be guaranteed. And it will be unfair to compare other trackers with this modified tracker.
I know that accelerating conv2d(kernel_size > 7) is difficult, i wonder if conv2d(kernel_size > 7) can just run on BPU without acceleration.
In this way, maybe making conv2d(kernel_size > 7) processed by AI-tool-chain is feasible.
[1] HiFT: https://github.com/vision4robotics/HiFT
'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)
