
1 前言
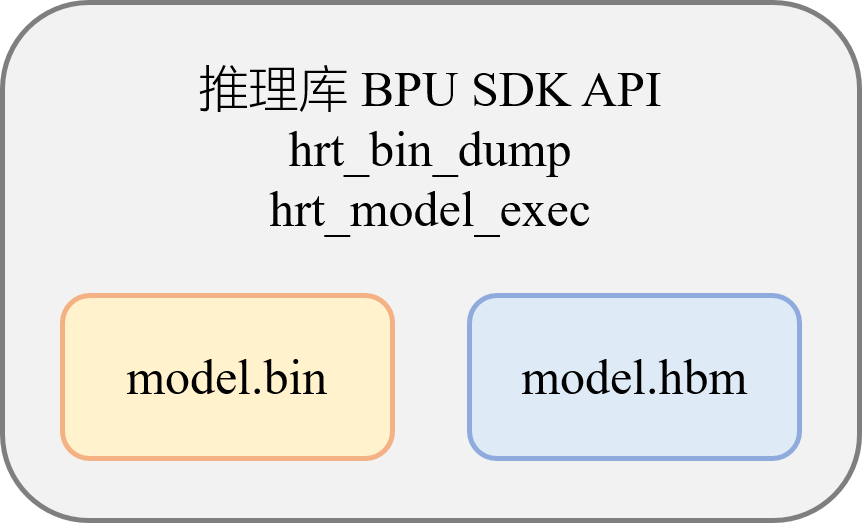
在完成模型的转换编译后,会得到可以在开发板上部署的模型文件,以bin或者hbm作为后缀名,区别在于:bin(Binary)模型是混合异构模型,可以同时包含CPU算子和BPU算子,而hbm(Horizon BPU Model)只含有BPU算子。这两种模型的板端部署方式没有区别,可以使用相同的推理库 BPU SDK API,也都支持hrt_bin_dump和hrt_model_exec工具对其进行分析。
2 示例介绍
本文重点介绍的快速上手示例是00_quick_start,这个示例会运行mobilenetv1_224x224_nv12.bin分类模型,读取一张jpg图片进行一次前向推理,并在后处理中计算得到Top5的分类结果。
开发者在编写板端部署代码前,需要先熟悉地平线提供的板端部署API,这部分可以查看工具链手册的BPU SDK API章节,这个章节除了详细介绍API接口,还全面介绍了板端部署有关的数据类型、数据接口等信息,以及数据排布与对齐规则,错误码等等。您也可以一边阅读示例代码,一边翻看API手册进行学习。
3 程序结构
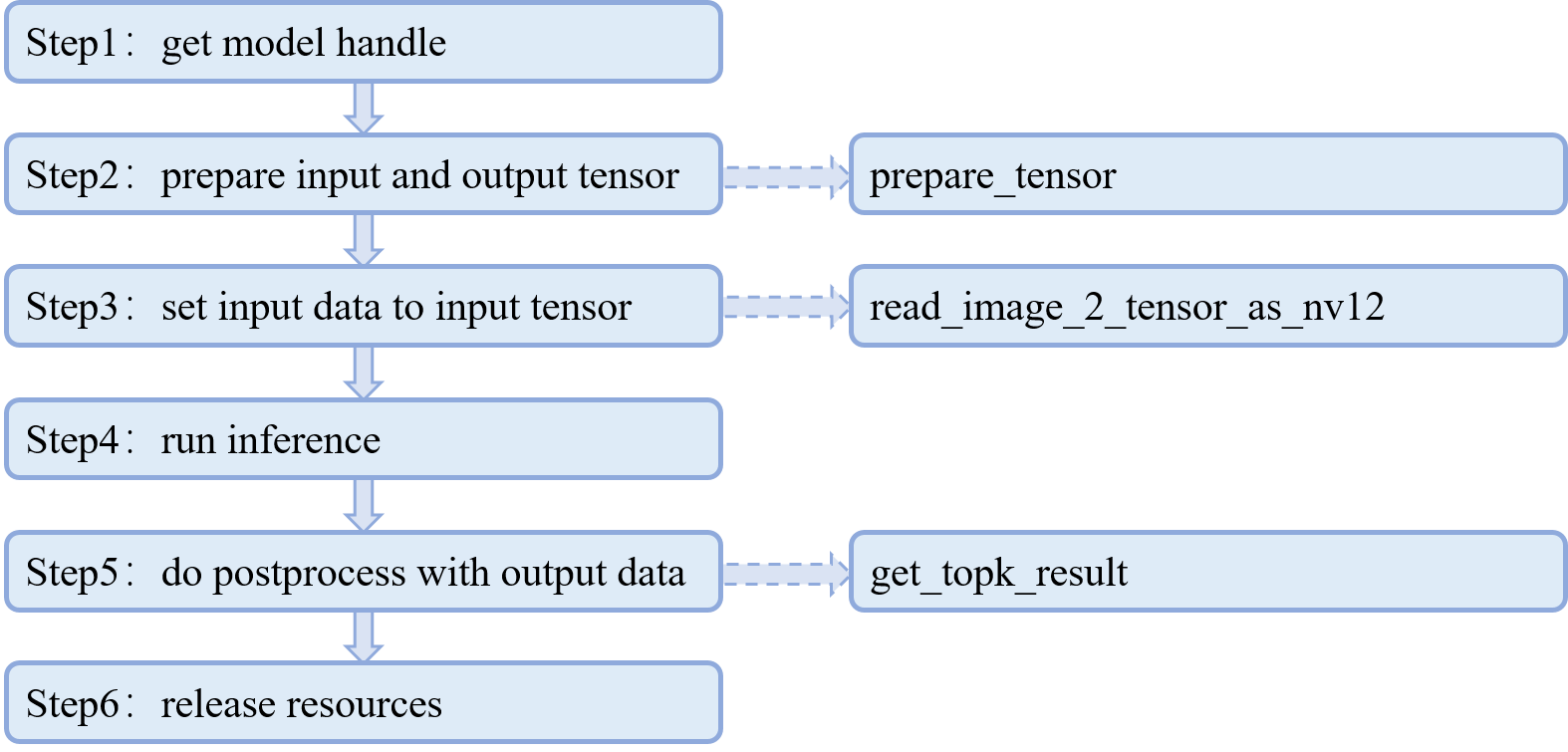
这张图展示了代码中main函数的六个主要步骤,实线箭头表示main函数的运行步骤,虚线箭头表示那个步骤需要调用的自定义函数,函数的具体实现在main函数之外。
4 代码解读
ddk/samples/ai_toolchain/horizon_runtime_sample/code/00_quick_start/src/run_mobileNetV1_224x224.cc
这里定义的字符串,代表板端运行脚本run_mobilenetV1.sh的命令行参数定义,即需要解析的输入参数,包括模型文件、图片文件,以及分类结果TopK的参数设置。
HB_CHECK_SUCCESS用于判断函数是否成功执行,参数value处填写执行的具体函数,函数返回值为0代表成功执行,执行失败则会返回错误码并在终端打印显示,用户可根据错误码对照工具链手册的5.2.5《错误码》章节查看报错原因,也可以使用hbDNNGetErrorDesc接口打印错误原因。
Classification(int id, float score, const char *class_name)
: id(id), score(score), class_name(class_name) {}
return (lhs.score > rhs.score);
}
} Classification;
Classificaton结构体主要定义了三个变量,分别是分类序号id,分类得分score,以及类别名class_name,会在后处理计算TopK的时候使用,友元函数重载的>运算符是为了配合TopK计算中优先级队列的优先级设置,后文分析TopK代码的时候会进行详细介绍。
接下来我们跳过函数声明,直接进入main函数。
google::InitGoogleLogging("");
google::SetStderrLogging(0);
google::SetVLOGLevel("*", 3);
FLAGS_colorlogtostderr = true;
FLAGS_minloglevel = google::INFO;
FLAGS_logtostderr = true;
hbDNNHandle_t dnn_handle;
const char **model_name_list;
auto modelFileName = FLAGS_model_file.c_str();
int model_count = 0;
这段代码使用了gflags的接口,解析脚本读取的文件信息并赋值给特定的变量。
Step1使用了三个API:从文件中初始化模型,获取模型的名称和数量,以及获取模型句柄。其中涉及到了“pack”的概念,这里做一个解释:工具链支持使用hb_pack工具将多个转换后bin模型整合成一个文件(使用细节可以查看工具链手册4.1.1.9《其他模型工具》),如果hbDNNInitializeFromFiles接口解析的是没有打包的单个模型,那么packed_dnn_handle指向的就是那一个模型,如果该接口解析的是打包了之后的整合模型,那么packed_dnn_handle会指向打包的多个模型,model_name_list列表也会包含所有的模型,model_count为所有模型的总数。
input_tensors和output_tensors是用vector定义的输入张量和输出张量,vector的数据类型是地平线封装的hbDNNTensor。input_count和output_count用于获取模型有多少个输入输出节点。之后进入Step2,调用hbDNNGetInputCount和hbDNNGetOutputCount接口,获取模型的输入输出节点数量,初始化input_count和output_count,再将输入张量input_tensors和输出张量output_tensors设定成对应的长度,用prepare_tensor函数进行内存空间的分配。接下来重点分析prepare_tensor函数(节选input部分):
for (int i = 0; i < input_count; i++) {
HB_CHECK_SUCCESS(
hbDNNGetInputTensorProperties(&input[i].properties, dnn_handle, i),
"hbDNNGetInputTensorProperties failed");
int input_memSize = input[i].properties.alignedByteSize;
HB_CHECK_SUCCESS(hbSysAllocCachedMem(&input[i].sysMem[0], input_memSize),
"hbSysAllocCachedMem failed");
input[i].properties.alignedShape = input[i].properties.validShape;
const char *input_name;
HB_CHECK_SUCCESS(hbDNNGetInputName(&input_name, dnn_handle, i),
"hbDNNGetInputName failed");
VLOG(EXAMPLE_DEBUG) << "input[" << i << "] name is " << input_name;
}
//output
......
return 0;
}
其中有一条语句:input[i].properties.alignedShape = input[i].properties.validShape; 用于让板端推理库自动对图像类型的输入数据做对齐(不包含featuremap类型)。关于为输入数据做对齐的具体方法,可以查看社区文章《在部署时为输入数据做padding》,具体的对齐规则解析可以查看《模型输入输出对齐规则解析》。模型的alignedShape和validShape可以在板端使用hrt_model_exec工具的model_info功能查看。
之后,使用hbSysAllocCachedMem接口分配带有缓存(Cache)的内存空间,有了缓存,CPU的读写效率会比不带缓存高很多。分配完内存空间后会打印当前输入输出节点的具体名称。
if (bgr_mat.empty()) {
VLOG(EXAMPLE_SYSTEM) << "image file not exist!";
return -1;
}
// resize
cv::Mat mat;
mat.create(input_h, input_w, bgr_mat.type());
cv::resize(bgr_mat, mat, mat.size(), 0, 0);
// convert to YUV420
if (input_h % 2 || input_w % 2) {
VLOG(EXAMPLE_SYSTEM) << "input img height and width must aligned by 2!";
return -1;
}
cv::Mat yuv_mat;
cv::cvtColor(mat, yuv_mat, cv::COLOR_BGR2YUV_I420);
uint8_t *nv12_data = yuv_mat.ptr<uint8_t>();
auto data = input->sysMem[0].virAddr;
int32_t y_size = input_h * input_w;
memcpy(reinterpret_cast<uint8_t *>(data), nv12_data, y_size);
int32_t uv_height = input_h / 2;
int32_t uv_width = input_w / 2;
uint8_t *nv12 = reinterpret_cast<uint8_t *>(data) + y_size;
uint8_t *u_data = nv12_data + y_size;
uint8_t *v_data = u_data + uv_height * uv_width;
if (u_data && v_data) {
*nv12 = *u_data;
*nv12 = *v_data++;
}
}
return 0;
}
read_image_2_tensor_as_nv12函数的输入参数中,image_file是输入图片,input_tensor是输入张量。用opencv的imread接口读取到的图片是bgr类型的数据,会先将其resize成模型需要的尺寸,并转换成yuv420(即nv12)格式,之后将yuv420的图片数据拷贝到输入张量的内存空间当中。
接下来是主函数的Step4,我们现在已经读取了模型,为输入输出张量分配了内存空间,并且将待推理的图像数据存放到了输入张量的内存空间中,马上就可以进行前向推理了。但是在正式调用hbDNNInfer接口执行推理前,还需要有一些准备工作,首先使用hbDNNTaskHandle_t接口创建一个新的推理任务,并将任务句柄task_handle初始化为空指针,再设置output指针指向输出张量。由于我们为输入张量分配的内存是带有缓存的,所以需要先将缓存数据更新到内存,确保BPU能读取正确的数据。初始化推理的控制参数之后,就可以使用hbDNNInfer接口执行前向推理了。task_handle是任务句柄,output是输出张量,input_tensors是输入张量,dnn_handle是模型句柄。infer_ctrl_param是推理任务的控制参数,可以设置当前任务运行在哪个BPU核上,也可以设置当前任务的优先级,可以使用HB_DNN_INITIALIZE_INFER_CTRL_PARAM进行默认的初始化设置,具体如下:
bpuCoreId = HB_BPU_CORE_ANY;
dspCoreId = HB_DSP_CORE_ANY;
priority = HB_DNN_PRIORITY_LOWEST;
customId = 0;
reserved1 = 0;
reserved2 = 0;
最后,hbDNNWaitTaskDone接口用于等待推理任务完成。
Step5是后处理的TopK计算。首先会定义一个名为top_k_cls的vector数组,这个数组的属性是Classification,也就是之前定义过的结构体,里面含有类的序号,分类得分,还有类的名字,这个vector数组用于存放TopK数量的信息,最后通过VLOG来打印结果。在执行TopK计算前,还需要将BPU输出数据从内存同步到缓存里,这样才能让CPU取到正确的数值。
我们仔细分析一下get_topk_result这个函数:
函数有三个输入,tensor是输出的张量,top_k_cls是刚才定义了的vector数组,top_k指top_k个最高的得分,在这个示例中top_k是5。
在这个函数的具体实现中,首先定义了一个优先级队列queue,这个优先级队列的元素比较方式是greater,意思是数值越小优先级越高。在使用这个queue之前,会先判断这个模型的输出数据是否需要做反量化,如果需要做反量化,还会判断是shift类型还是scale类型。
浮点数据score表示的就是某一个类别最后的得分。每得到一个score,就会将这个score对应的类别送入优先级队列queue,如果queue的元素数量超过top_k,到达了6个,就会让queue中优先级最高的类别出队,又因为这个优先级队列数值最小的类优先级最高,所以出队的一定是这6个类中得分最低的类。这样循环完一整轮之后,优先级队列queue就只会剩下5个得分最高的类了。
最后再把queue里的数据存放到vector数组top_k_cls中进行打印,完成整个TopK的后处理逻辑。
主函数中的最后一步Step6,就是一些收尾工作,依次释放任务句柄,释放输入输出申请的内存空间,最后释放模型句柄。到这里,整个快速上手的代码就解读完成了。
5 板端运行
00_quick_start这个示例有两种运行方式,第一种是在x86端使用模拟器运行,第二种是在板端实际运行,接下来以j5芯片为例进行介绍,xj3的步骤类似。
x86端模拟运行的方法是:先运行code文件夹下的build_x86.sh脚本,脚本执行完毕后会在j5文件夹下生成可执行文件及相关依赖,之后我们进入j5/script_x86/00_quick_start目录,运行run_mobilenetV1.sh脚本,即可以x86模拟器的方式运行该示例,执行模型的前向推理并打印Top5分类结果。
板端运行的具体方法是:先运行code文件夹下的build_j5.sh脚本,脚本执行完毕后会在j5文件夹下生成文件及相关依赖,我们将整个j5文件夹复制到板端,再进入j5/script/00_quick_start目录,运行run_mobilenetV1.sh脚本,即可在开发板上运行快速上手示例了。
这个快速上手示例在J5开发板上运行的终端打印信息如下:
希望本文能帮您快速上手模型的板端推理。

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)