您好,
请问关于J2感知目标轨迹出现出现转圈圈的问题
MCU根据《S-05 Horizon Journey 2 Mono SOC与MCU通信协议_普通SPI_v0.8》将车速等信息给到感知后,录屏上的目标轨迹出现如下转圈圈的问题。
Yaw偏航角给0的时候不会出现此问题。
所以请问下,对于偏航角,MCU端是按照DBC做了换算之后透传到感知端的,请问出现下图情况是否意味着还需要做其它的转换关系?

您好,
请问关于J2感知目标轨迹出现出现转圈圈的问题
MCU根据《S-05 Horizon Journey 2 Mono SOC与MCU通信协议_普通SPI_v0.8》将车速等信息给到感知后,录屏上的目标轨迹出现如下转圈圈的问题。
Yaw偏航角给0的时候不会出现此问题。
所以请问下,对于偏航角,MCU端是按照DBC做了换算之后透传到感知端的,请问出现下图情况是否意味着还需要做其它的转换关系?

'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) Lv.1
Lv.1你是指的底盘输入还是感知输出?同时建议检查一下角度和弧度的关系
底盘输入,即MCU->J2的方向。
可以参考一下这个文档,Horizon Journey 2 Mono Vehicle 底盘信息接入集成手册 。
可以查一下你板端的配置,/mnt/adas-rt/config/CANInputModule.json中如下字段以确定你板端具体使用的是哪一个配置。然后MCU侧按该配置协议来进行转发
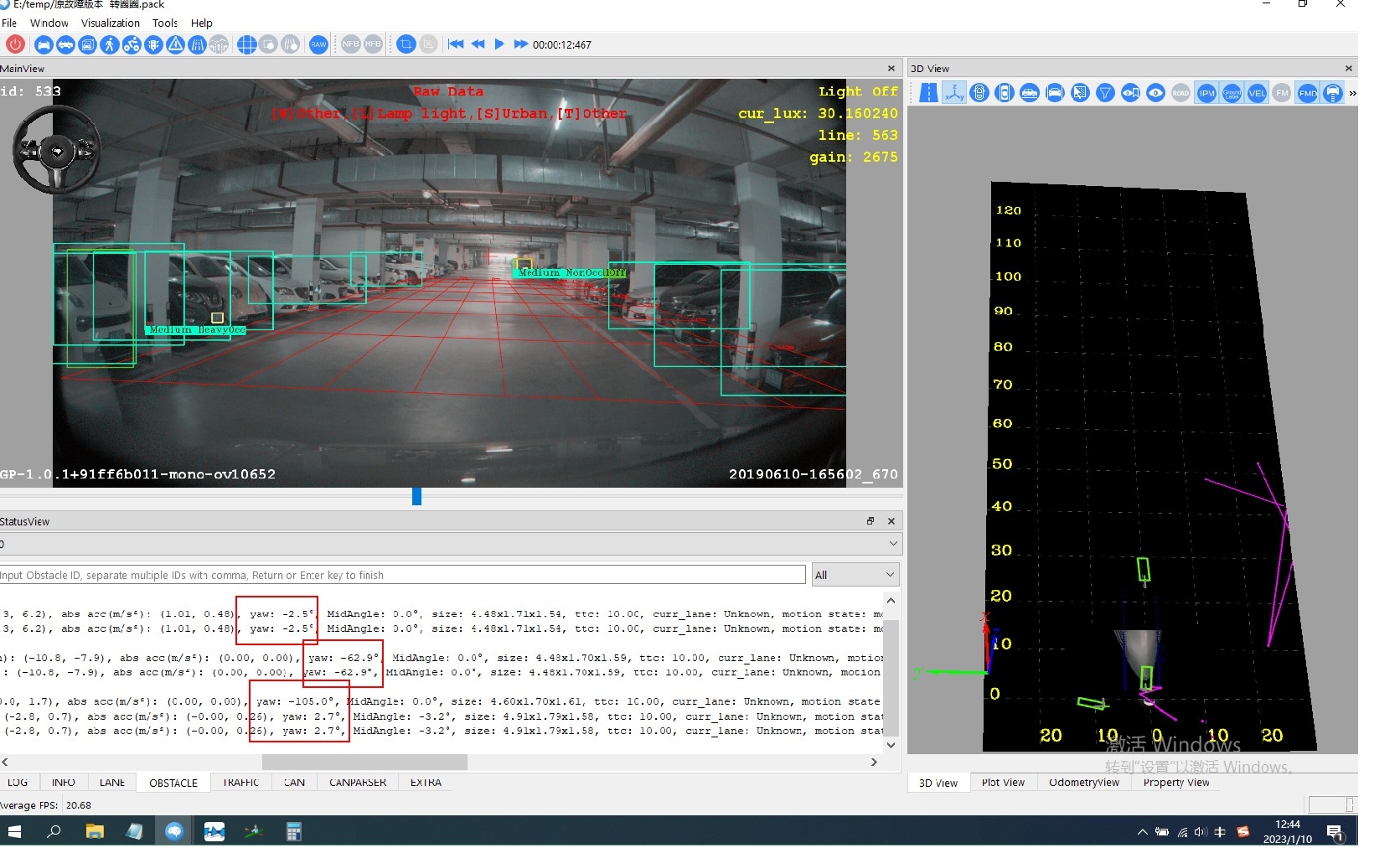
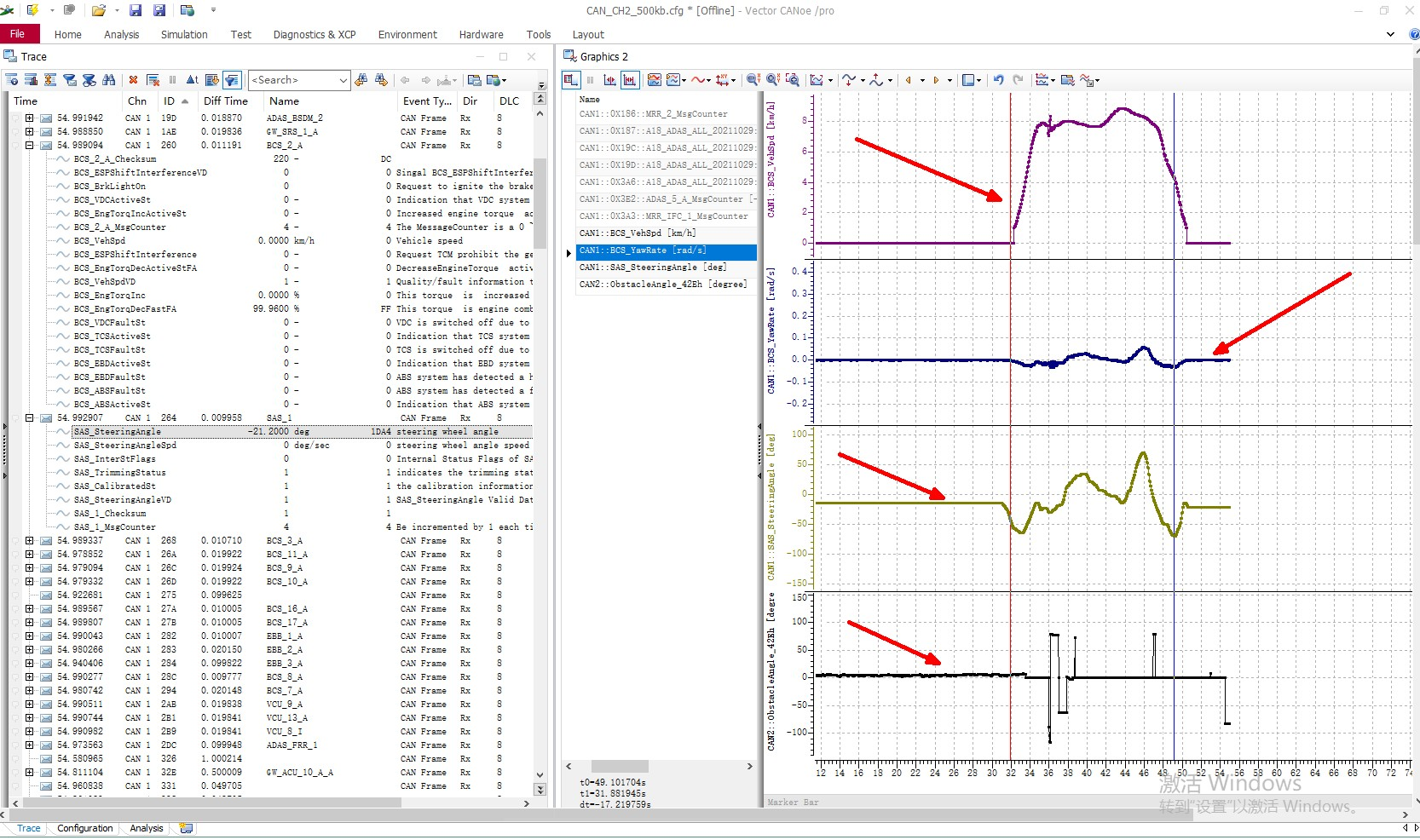
我说下这个问题的实验情况,从实验结果上看,MCU给到J2的自车车速已经在感知端网口输出的上位机上正常显示,这说明MCU给到J2的链路已经没有问题。在台架上试验,同时给固定值的车速和偏航角yaw_rate到J2端,车速能在上位机上显示正常,但偏航角yaw_rate就是固定的-2.48,从协议来看,车速与偏航角等信息是一帧数据给到J2端的,这个问题,我觉得很有可能当前J端的版本没有做处理,请问如何确认呢?
在车子行进过程中,上位机显示的的3D view窗口中,目标框绕着车子逆时针转圈圈。原因是上位机显示的yaw_rate恒为-2.48,根据手册说明的左正右负坐标系,上位机判定车子在以2.48的yaw_rate恒定右转,所以显示的轨迹就是目标在逆时针转圈圈。至于为什么yaw_rate为-2.48,这个在上一条回复有描述
这个是我打印输出的信息