我在 vpm_config.json 配置文件里面 绑定 isp_node0 ---> ynr_node0,跑tuning_bin后显示绑定失败,错误码 324。是不是我配置有误?vpm_config.json文件在附件。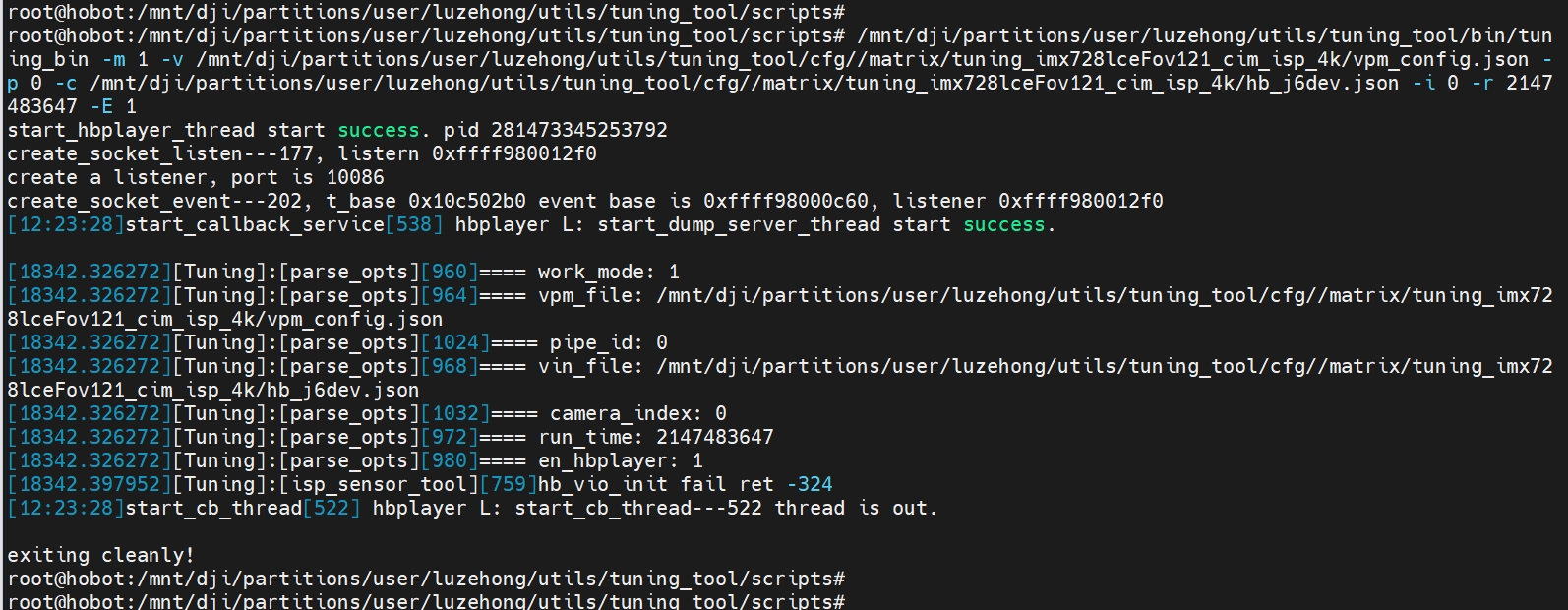



'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) Lv.4
Lv.4isp->ynr->pym->ddr->表示bind

bind的话要指定后级模块的
Lv.5你的配置配了没
还要加一个pym, 你能参考我们的sample code那到sample code的配置文件么
Lv.3您好,您的帖子已较长时间未处理,如有新的问题,欢迎重新发起提问。
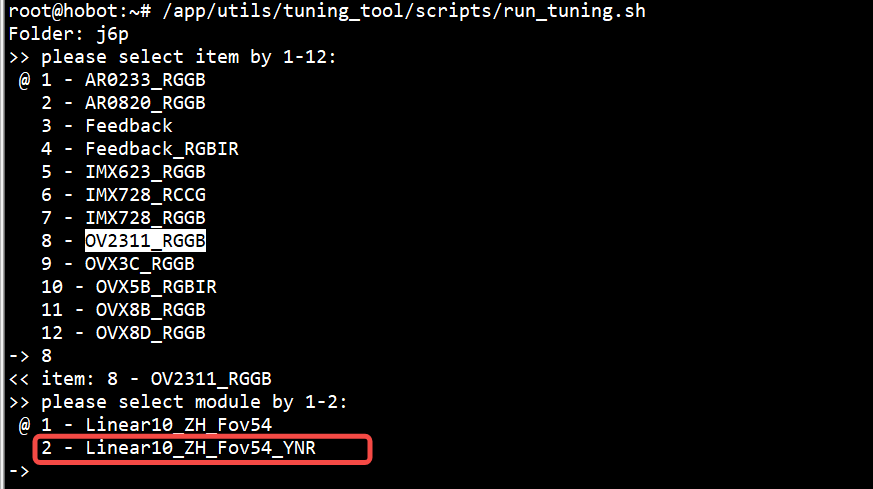
Lv.4tuning脚本里OV2311_RGGB分支有YNR配置的,可以参考

那要贴logcat和dmesg了
打开logcat 等级要调下export LOGLEVEL=4 看下是哪里有异常
最新的vpm_config.json、dmesg信息、logcat信息在附件
(26494): [78.599480][ynr_cfg.c]:[ynr_node_parser_config][108]ynr_node_parser_config 108 ch_img_width & ch_img_height should be < 2840. E/ (26494): [78.599480][ynr_cfg.c]:[ynr_node_parser_config][121]ynr_node_parser_config 121 1 of ynr's json configuration parameters are illegal.size超出了范围
2dnr模块最大尺寸是 4096 *4096 3dnr会小一点,是 2048* 2048, 如果接大尺寸同时不需要开启3d配置文件中3dnr的enable要改为0
配置的尺寸报错了,检查下配置吧,最好能复用我们的配置
如zsy所说,ynr有尺寸限制,当模组尺寸比较大时可以通过isp的输出crop裁剪一下
我这边的模组分辨率是 3840*1888,符合2dnr支持的尺寸要求,但是不符合3dnr,所以我把3dnr Disable了。isp输出未做裁减,全分辨率输出给ynr,这样是否可以?
可以的
我这边模组输出的分辨率是 3840*1888,不希望做裁减
要在配置文件中将 nr3d_en 配置为0
配置文件改下这个 nr3d_en 配置为0
好的
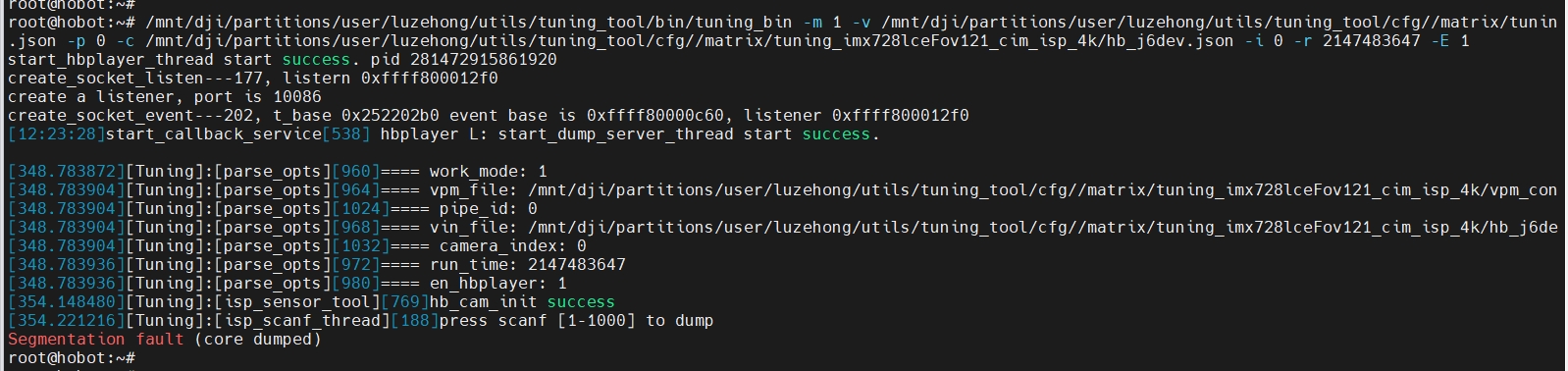
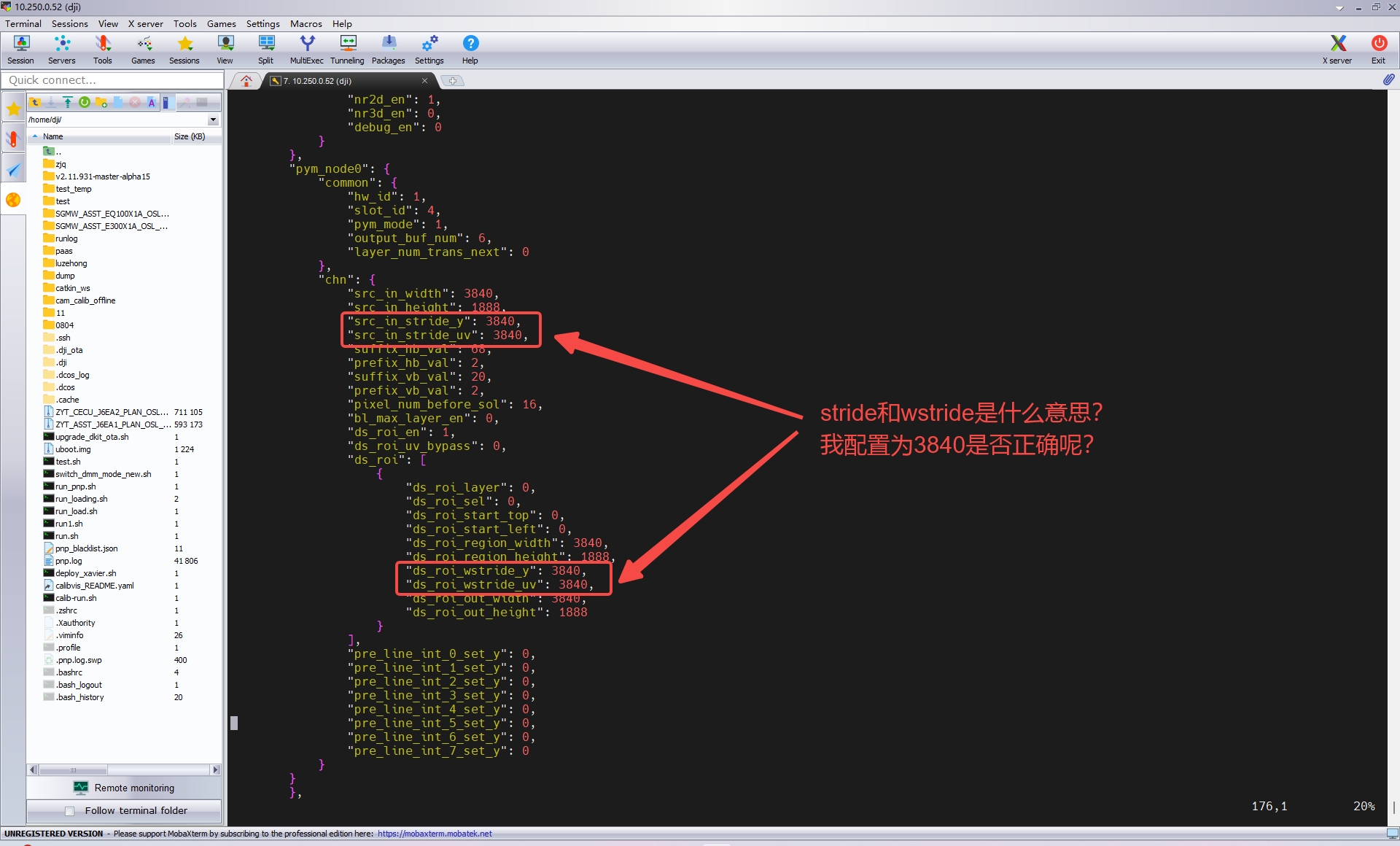
stride你配置跟w一样可以的 ,段错误了可以用gdb看看core文件是挂在哪里
gdb /path/test_bin /path/core_file
我不知道core_file的存放路径
/log/coredump 目录
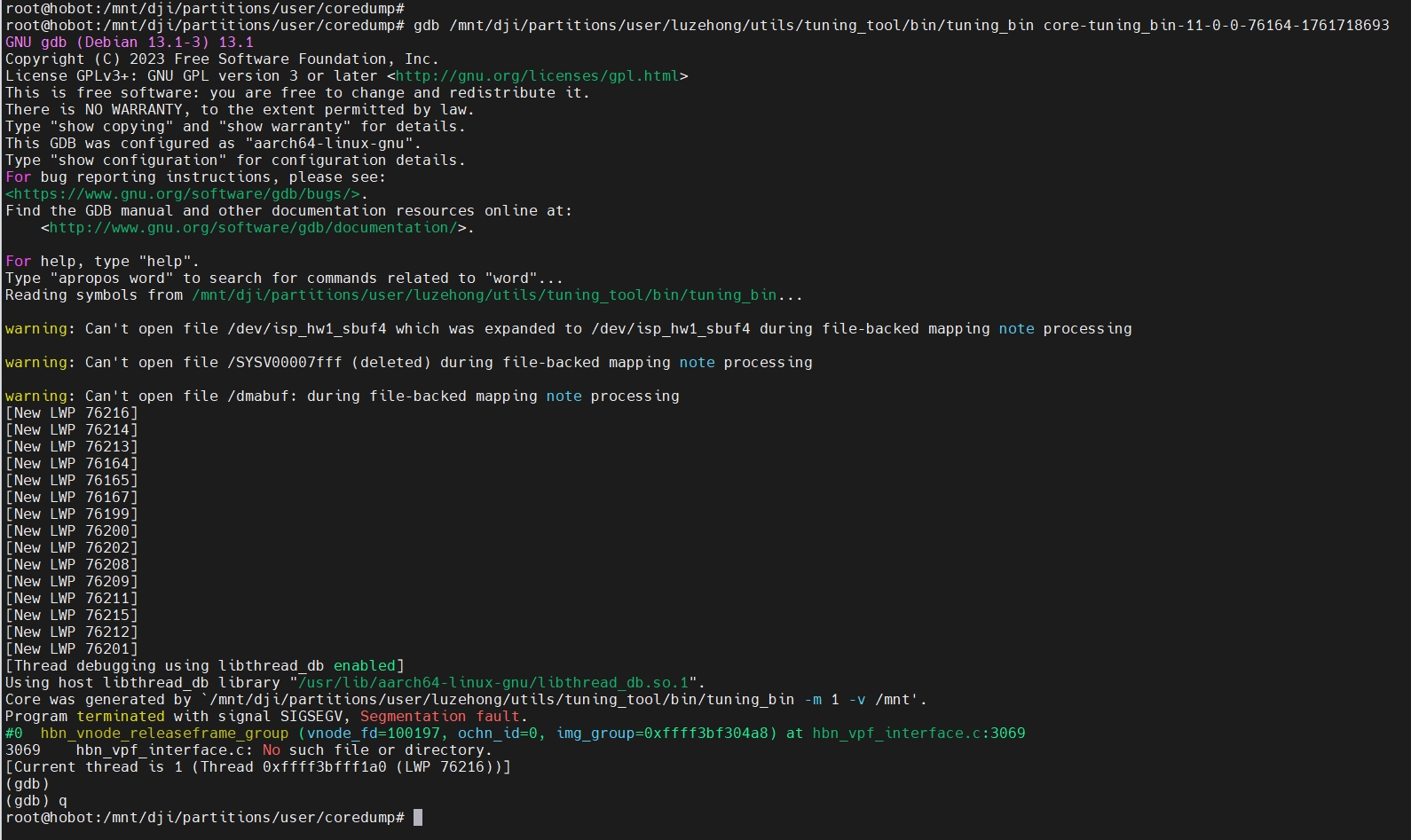
是不是 hbn_vpf_interface.c 没有编译进去?
不要q, 再敲下bt
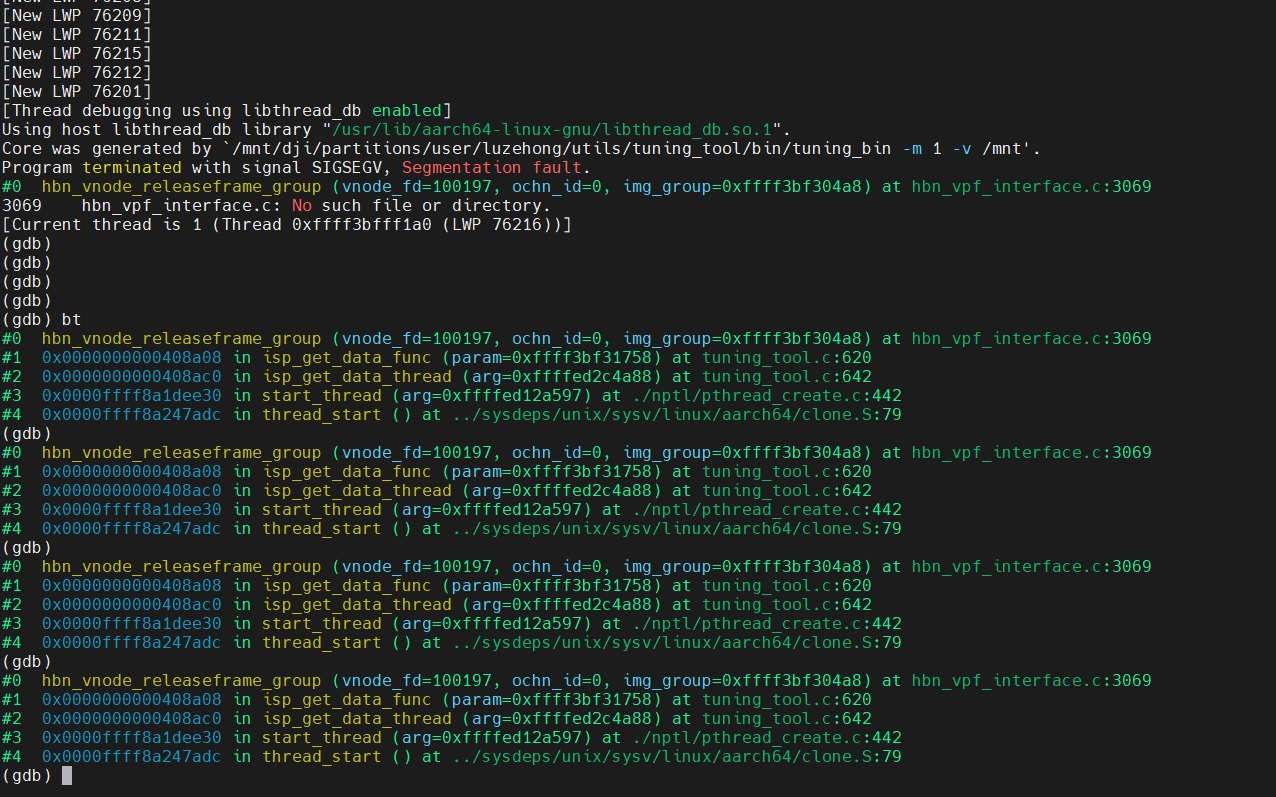
敲了bt之后的log如上
怀疑是参数开启了ynr debug“ -Y enable ynr debug”关闭3dnr就不能开这个参数
你这个是control tool的工释放frame的是崩了
root@hobot:~# /app/utils/tuning_tool/bin/tuning_bin start_hbplayer_thread start success. pid 281472981922208 create_socket_listen---175, create failed listern (nil) create_socket_listen---179, listern 0xffff840012d0 create a listener, port is 10087 create_socket_event---204, t_base 0xc2602b0 event base is 0xffff84000c30, listener 0xffff840012d0 [426412.867584]start_callback_service[538] hbplayer L: start_dump_server_thread start success. [426412.867584][Tuning]:[print_usage][1433]Usage: /app/utils/tuning_tool/bin/tuning_bin -m work mode 0: ISP_TOOL 1: ISP_FB_TOOL -v vpm_config path -c cam_config path -p pipe_id -M dual_sensor -i camera_index -r run time for isp tool (second) -l loop count for feedback mode -E enable hobotplayer -b enable get ae info -B enable set ae info -z enable get context -Z enable set context -D input path -o output path -y get yuv after ynr -Y enable ynr debug -F raw-format 1:raw8 2:raw12 3:raw16 -d dump count brfore scanf -q codec quality factor -e enable codec -h usage help
我在vpm_config.json中已经把ynr debug关掉了,tuning_bin还是没跑起来
还是coredump?
要看下跑不起来的原因了,你那边能跑sample 么,sample可能比tuning bin的参考用例会多很多的
使用的效果库里YNR的状态是什么样的