onnx转hbm验证的时候可以通过,但是通过量化转hbm的时候就会oom报错 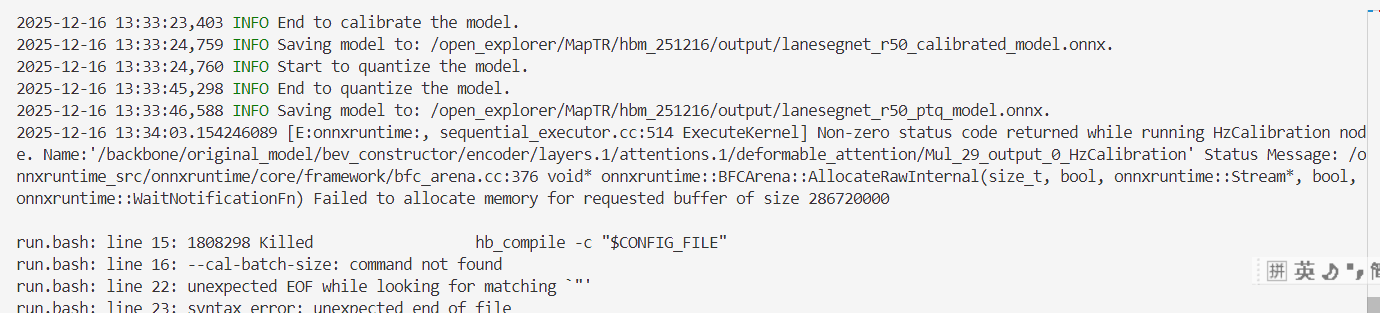 配置如下:O2,
配置如下:O2,
配置如下:O2,cal_batch_size为1,但是实际转的时候会有提示说usingbatch为8,然后强转为1的点
 配置如下:O2,
配置如下:O2,cal_batch_size为1,但是实际转的时候会有提示说usingbatch为8,然后强转为1的点


'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e) Lv.5
Lv.51. 芯片类型?
2. 工具链版本?
3. 模型分享一下(做排除环境和服务器配置的交叉验证)
初步判断你的你的服务器配置的内存小了,也可以自己换个高配置服务器试试。
j6m


在校准时候,实时监控下内存占用情况吧,#watch -n 1 free -h
检查下是不是系统单次内存分配有限制 cat /proc/sys/vm/overcommit_memory
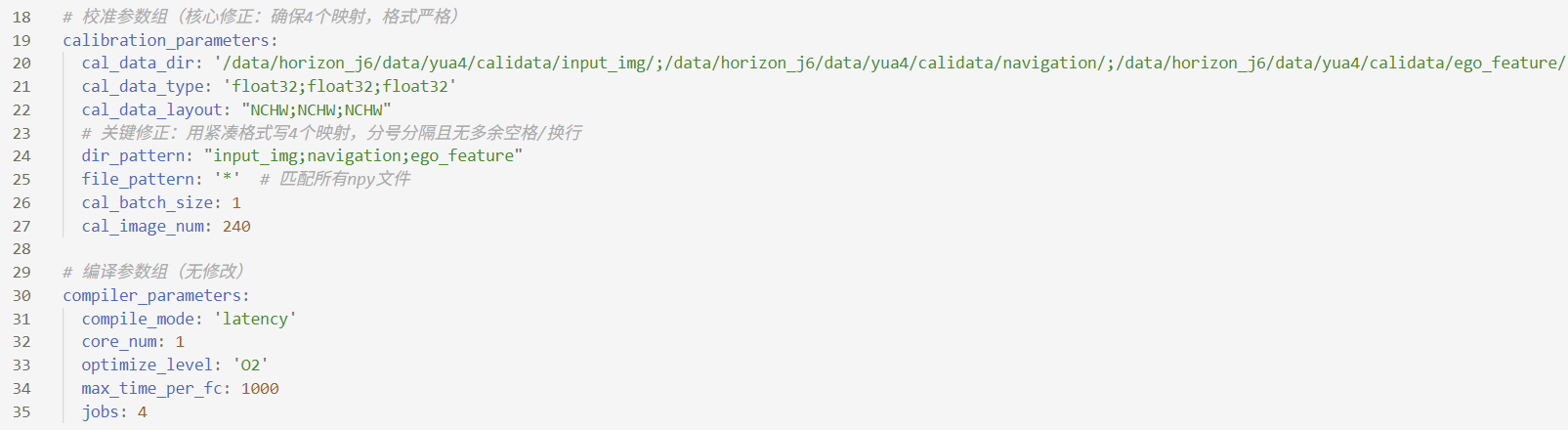
Lv.1补充配置 # 模型参数组(无修改)model_parameters:onnx_model: '/open_explorer/MapTR/Wholemodel_v1_0_ep55.onnx'march: 'nash-m'output_model_file_prefix: 'lanesegnet_r50'working_dir: './output'debug_mode: ""# 输入信息参数组(保持四维形状)input_parameters:input_name: "input_img;navigation;ego_feature" input_type_train: "featuremap;featuremap;featuremap"input_layout_train: "NCHW;NCHW;NCHW"input_shape: "1x7x3x544x960;1x39x2;1x5" # input_batch: "1"input_type_rt: "featuremap;featuremap;featuremap"# 校准参数组(核心修正:确保4个映射,格式严格)calibration_parameters:cal_data_dir: '/data/horizon_j6/data/yua4/calidata/input_img/;/data/horizon_j6/data/yua4/calidata/navigation/;/data/horizon_j6/data/yua4/calidata/ego_feature/' # 根目录必须存在cal_data_type: 'float32;float32;float32' cal_data_layout: "NCHW;NCHW;NCHW"# 关键修正:用紧凑格式写4个映射,分号分隔且无多余空格/换行dir_pattern: "input_img;navigation;ego_feature"file_pattern: '*' # 匹配所有npy文件cal_batch_size: 1cal_image_num: 240 # 编译参数组(无修改)compiler_parameters:compile_mode: 'latency'core_num: 1optimize_level: 'O2'max_time_per_fc: 1000jobs: 4
Lv.1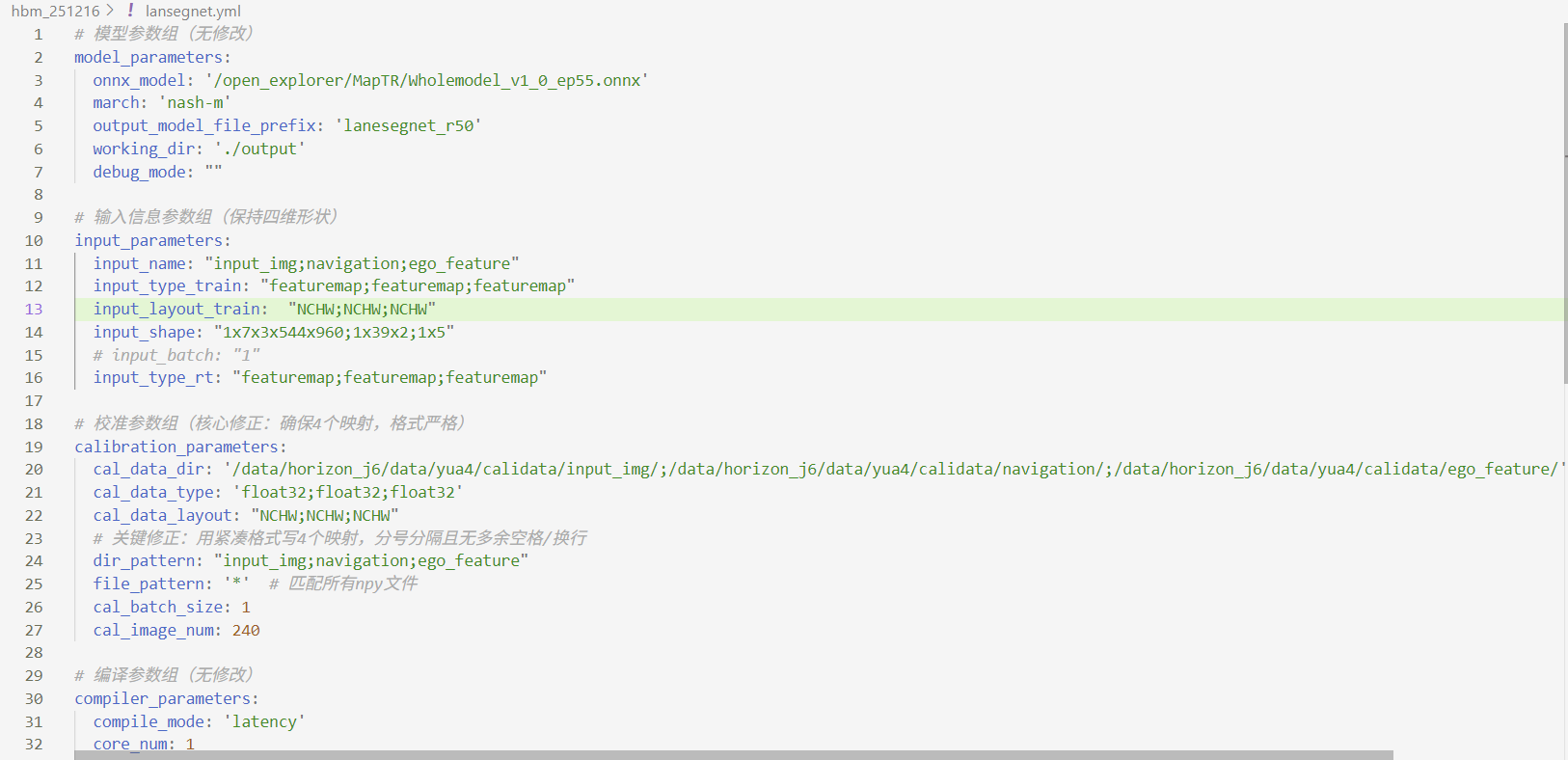
 Lv.1
Lv.1
这个时正常的,校准过程会先尝试用batch8校准,如果模型本身不支持,会退回到batch1校准,无论哪种,都可以完成校准,如果你的问题是这个,那么这个问题可以忽略,不影响使用。
 Lv.1
Lv.1问题已解决,通过扩大swap空间
OK,跟问题的提示是一直呢,内存不足的原因