
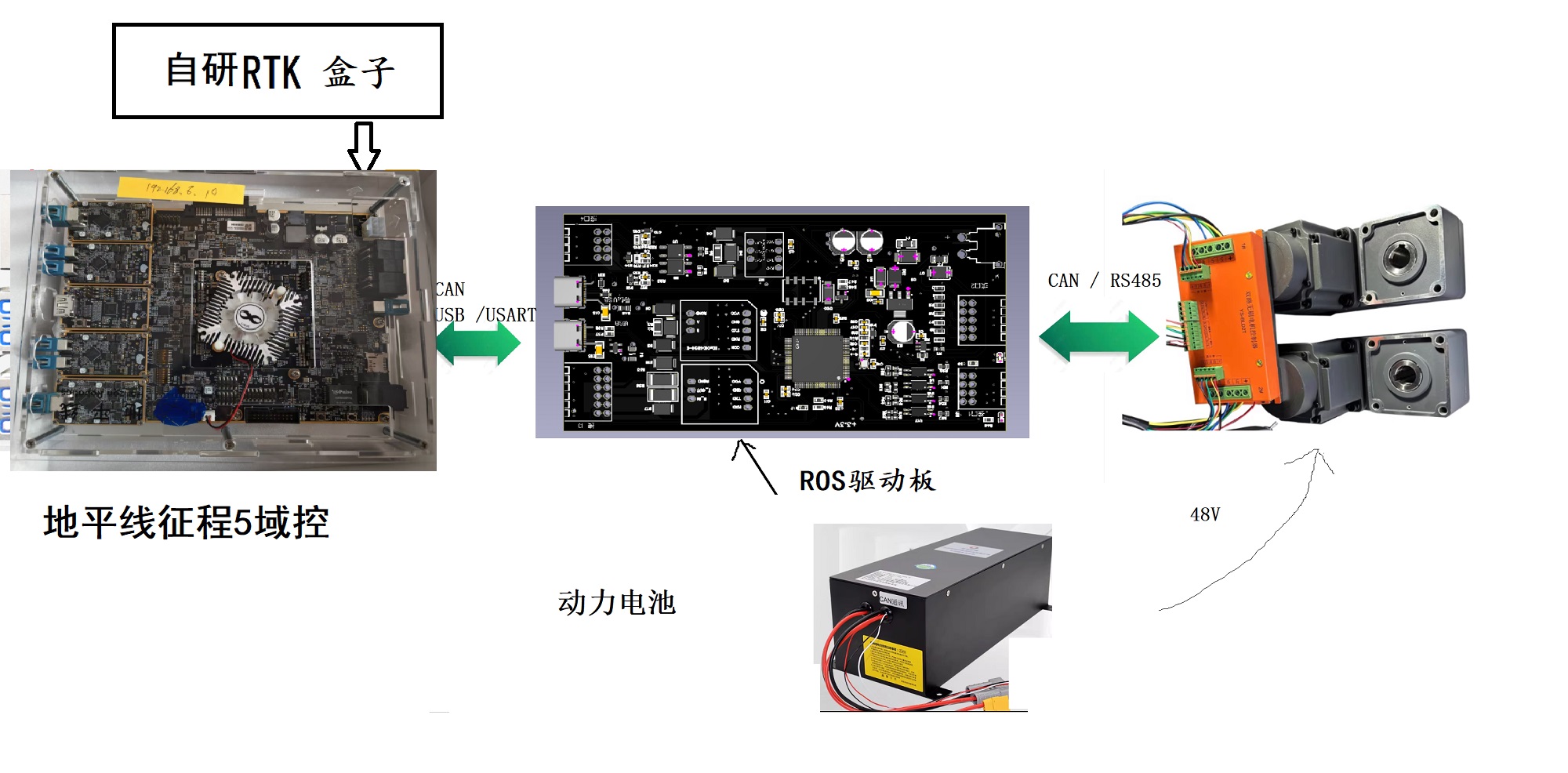
基于地平线征程 5 域控 + RTK的智能车方案,是当前高精度定位 + 强算力感知的主流组合,可实现厘米级定位与 L2+/L3 级智驾,也是地平线官方试用活动的核心方向。
一、核心方案概览
1. 征程 5 域控核心能力(试用硬件基础)
算力:单颗128TOPS,双颗可达256–512TOPS,满足多传感器融合与规控实时性。
接口:支持16 + 路摄像头、毫米波雷达、激光雷达、RTK/IMU、CAN / 以太网,适配全场景感知。
定位融合:原生支持RTK+IMU + 高精地图 + 视觉 SLAM融合,输出厘米级位姿地平线HorizonRobotics。
功能安全:符合ISO 26262 ASIL-B/D,适配量产车规。
2. RTK 在智能车中的作用
定位精度:RTK+IMU可实现水平 ±1–3cm、垂直 ±3–5cm,解决 GPS 盲区(隧道 / 地下车库)漂移地平线HorizonRobotics。
核心价值:为车道级导航、自动泊车、城区 NOA、编队行驶提供绝对坐标基准。
典型配置:RTK 基站 / 网络差分(NTRIP)+ 车端 RTK 接收机 + 6 轴 IMU + 里程计。
'/%3e%3cpath%20d='M8%200.5C12.1421%200.5%2015.5%203.85786%2015.5%208C15.5%2012.1421%2012.1421%2015.5%208%2015.5C3.85786%2015.5%200.5%2012.1421%200.5%208C0.5%203.85786%203.85786%200.5%208%200.5Z'%20fill='url(%23paint1_linear_0_45845)'%20stroke='white'/%3e%3cpath%20d='M10.0597%204.5332C10.031%204.5332%2010.0036%204.54817%209.98859%204.57313L8.09724%207.79442C8.02613%207.90046%207.84897%208.23731%207.5483%208.7875C7.37863%209.0969%207.25387%209.32771%207.17152%209.48615C7.1341%209.55727%207.0293%209.53855%207.01807%209.45871C6.97191%209.11936%206.89456%208.6066%206.78727%207.91793L6.2483%204.61804C6.24207%204.57812%206.20713%204.54942%206.16721%204.54942H4.28085C4.2297%204.54942%204.18977%204.59683%204.201%204.64798L5.71059%2012.1959C5.71808%2012.2346%205.75176%2012.2621%205.79044%2012.2621H7.46845C7.49715%2012.2621%207.52335%2012.2471%207.53832%2012.2234L12.1869%204.65796C12.2205%204.60307%2012.1806%204.5332%2012.117%204.5332H10.0597Z'%20fill='white'/%3e%3cdefs%3e%3clinearGradient%20id='paint0_linear_0_45845'%20x1='8.99711'%20y1='15.3526'%20x2='47.3575'%20y2='15.3526'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3clinearGradient%20id='paint1_linear_0_45845'%20x1='1.1152'%20y1='15.1368'%20x2='15.3888'%20y2='15.1368'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20stop-color='%23AF86FF'/%3e%3cstop%20offset='1'%20stop-color='%23774EFF'/%3e%3c/linearGradient%3e%3c/defs%3e%3c/svg%3e)