
本文详解 J6P/H 计算平台部署指南,分硬件、软件模块介绍,梳理官方推荐流程与实用工具特性,帮你快速理解并落地部署。



- 可信的人类与人工智能协作:基于人类反馈和物理知识的安全自主驾驶强化学习# 1.Abstract.在自动驾驶领域,开发安全且可信赖的自动驾驶策略仍然是一项重大挑战。近年来,结合人类反馈的强化学习(RLHF)因其提升训练安全性和采样效率的潜力而备受关注。然而,现有的RLHF方法在面对不完美的人类示范时,往往会表现不佳,可能导致训练振荡甚至表现比基于规则的方法更差。受人类学习过程的启发,我们提出了物理增强的人类反馈强化学习(PE-RLHF)。该新框架协同融合了人类反馈(如
 巴山夜雨算法工具链技术深度解析前沿技术2024-09-092024-09-0927
巴山夜雨算法工具链技术深度解析前沿技术2024-09-092024-09-0927 - SOA 的通信基石为什么是大带宽和 IP?01 写在最前面从踏入职业生涯就开始接触所谓的 SOA,一直都在思考什么是 SOA,通信基石又是什么?是以太网?是 someip?是 dds?亦或者其他协议?那我的答案:都不是,是大带宽和 IP。SOA 在车载真的是一个很新的东西么?在我看来,其实也不算是,在 cp 中,站在高层开发者来说,RTE+SWC 未尝就达不到我们所谓 SOA 需要解决的痛点!那为啥依然 SOA 还会成为主流的“软件定义汽巴山夜雨算法工具链技术深度解析前沿技术2024-09-062024-09-0635
- 在自动驾驶汽车中进行早期融合的2种方法(以及何时使用中期或晚期融合)前阵子,我参与了一个开源的自动驾驶赛车计划,我们的团队领导要求我们做的第一件事是研究目标检测算法。.我们被困住了。哪种情况下应该使用 go?在工程领域,学术派喜欢默认的技术,让工程师自己审阅论文,然后在一两周后分享他们的结论。我认为这是浪费时间,因为大多数人可能根本没看过,或者在最后一秒匆忙完成。.我们有一个“早期融合”策略,它涉及在我们阅读论文之前就将我们的大脑融合在一起……我们还有一个“晚期融巴山夜雨算法工具链技术深度解析前沿技术2024-09-052024-09-0547
- TADC-J6-FAQ 手册 _ 1.0.SSD:.Q1:单J6如何接入ssd?..J6域控提供PCIe U.2接口引出,可以连接U.2转M.2 NVm设备或其他U.2接口PCIe设备。.J6 PCIe提供PCIe gen4.0 × 2lane,目前由于U.2接口性能限制,可以达到PCIe gen3.0 × 2lane的速率(理论速率2GB/s,实际可达到1.4GB/s)。.将U.2 转M.2 Nvme设备接入域控,使能PCIe需要的信
 Pema算法工具链官方教程征程62024-09-052024-09-05776
Pema算法工具链官方教程征程62024-09-052024-09-05776 - 科普 | 自动驾驶环境感知传感器大解析本文梳理了车载摄像头、毫米波雷达、超声波雷达、激光雷达、V2X,含当前现状、上车情况等,基础科普性质。...自动驾驶三大核心技术分别是环境感知、融合决策、线控执行。其中,环境感知作为自主行驶的基础和前提,是自动驾驶发展的第一个关键环节,其核心在于使自动驾驶系统更好的模拟、最终超越人类驾驶员的感知能力,准确的感知并且理解自身及周围的交通环境。.环境感知是一个复杂的系统,它需要多种车载传感器实时获取周巴山夜雨算法工具链技术深度解析前沿技术2024-09-032024-09-0385
- 0基础学习地平线J6 QAT量化感知训练# 1. 背景.首先感谢地平线工具链用户手册和官方提供的示例,给了我很大的帮助,特别是代码注释写了很多的知识点,超赞!要是注释能再详细点,就是超超赞了!下面开始正文。..最近想着学QAT(量化感知训练)玩玩,大体看了一下地平线的用户手册,不说精度调优之类比较复杂的,光一个QAT上手,就感觉对我这种小白不是很友好,捣鼓了好久,感觉在用户手册中很多基础概念都没写,不同模块之间的关联性也没有详细地介绍,
 no_name算法工具链社区征文官方教程技术深度解析2024-09-022024-09-02638
no_name算法工具链社区征文官方教程技术深度解析2024-09-022024-09-02638 - 地平线静态目标检测 MapTR 参考算法-V2.0> 该示例为参考算法,仅作为在J6上模型部署的设计参考,非量产算法..# 简介.高清地图是自动驾驶系统的重要组件,提供精确的驾驶环境信息和道路语义信息。传统离线地图构建方法成本高,维护复杂,使得依赖车载传感器的实时感知建图成为新趋势。早期实时建图方法存在局限性,如处理复杂地图元素的能力不足、缺乏实例级信息等,在实时性和后处理复杂度上存在挑战。..为了解决这些问题,基于Transformer的Map
 芯链情报局感知规控征程62024-08-312024-08-312393
芯链情报局感知规控征程62024-08-312024-08-312393 - J6在Centos宿主机上也能编译的奇妙方法# ubuntu推荐的必装环境.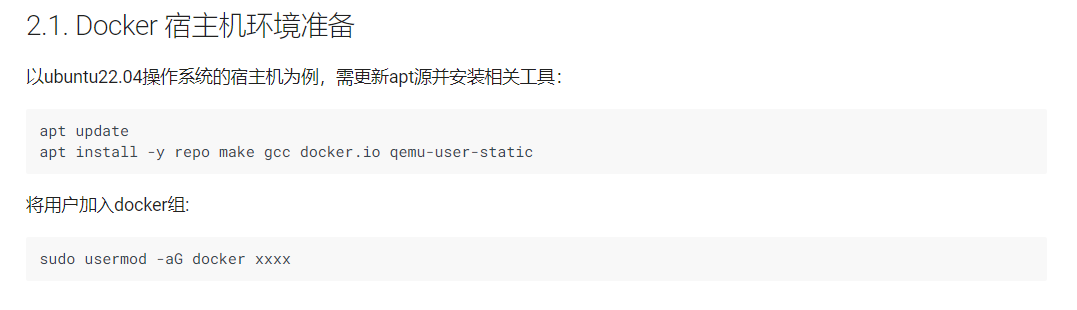](https://prod-dc-resources.oss-cn-beijing.aliyuncs.co
 绝世糕手算法工具链征程6社区征文官方教程2024-08-302024-08-3057
绝世糕手算法工具链征程6社区征文官方教程2024-08-302024-08-3057 - 地平线高效backbone: HENet -V1.0背景 & 目标为了 提供针对 J6 系列芯片专门设计的高效 backbone,我们充分利用了 J6 芯片的硬件特性,设计了高效模型 HENet (Hybrid Efficient Network)性能&精度数据HENet_TinyM总体结构HENet_TinyM (Hybrid Efficient Network, Tiny for J6M) 采用了纯 CNN 架构,总体分为四个 stage,每个芯链情报局算法工具链官方教程2024-08-302024-08-301635
- 地平线双目深度估计参考算法StereoNetPlus优化思路解读【参考算法】地平线双目深度估计参考算法StereoNetPlus-v1.2.11. 引言本文将介绍地平线基于公版的双目深度估计算法StereoNet做的优化设计。首先介绍了双目深度估计的原理以及双目点云和Lidar点云的对比,然后由公版StereoNet的介绍切入到地平线参考算法的针对性优化,最后对可视化结果进行了解读。2.双目深度估计原理2.1 基本假设假设双目系统是标准形式,即:两相机内参数相
 momo(社区版)算法工具链征程5征程6社区征文官方教程2024-08-302024-08-30329
momo(社区版)算法工具链征程5征程6社区征文官方教程2024-08-302024-08-30329 - 地平线3D目标检测 Bevformer 参考算法-V1.0该示例为参考算法,仅作为在J6上模型部署的设计参考,非量产算法简介BEVFormer是当前热门的自动驾驶系统中的3D视觉感知任务模型。BEVFormer是一个端到端的框架,BEVFormer可以直接从原始图像数据生成BEV特征,无需依赖于传统的图像处理流程。它通过利用Transformer架构和注意力机制,有效地从多摄像头图像中学习生成高质量的鸟瞰图(Bird's-Eye-View, BEV)特征芯链情报局算法工具链征程6官方教程2024-08-302024-08-301627
- 地平线3D目标检测 bev_sparse 参考算法-V1.0该示例为参考算法,仅作为在J6上模型部署的设计参考,非量产算法简介在自动驾驶视觉感知系统中,为了获得环绕车辆范围的感知结果,通常需要融合多摄像头的感知结果。目前更加主流的感知架构则是选择在特征层面进行多摄像头融合。其中比较有代表性的路线就是这两年很火的BEV方法,继Tesla Open AI Day公布其BEV感知算法之后,相关研究层出不穷,感知效果取得了显著提升,BEV也几乎成为了多传感器特征融芯链情报局算法工具链征程6前沿技术2024-08-302024-08-301233
- 为什么我认为特斯拉仍在 FSD12 中使用 CNN(不仅仅是 Transformer)?原文链接:https://www.thinkautonomous.ai/blog/tesla-cnns-vs-transformers/翻译:有一件事让我对 CNN 和 Transformer 之争特别感兴趣。先讲讲来龙去脉:埃隆-马斯克和 Yann LeCun(CNN 的发明者)之间的微信交流本文的分析基于特斯拉的会议、2021 年和 2022 年的人工智能日以及 2023 年的 CVPR,可以巴山夜雨算法工具链技术深度解析前沿技术2024-08-292024-08-2971
- 攻克复杂驾驶场景!SimpleLLM4AD:用于自动驾驶的端到端视觉语言模型# 论文信息.题目:SimpleLLM4AD: An End-to-End Vision-Language Model with Graph Visual Question Answering for Autonomous Driving..作者:Peiru Zheng, Yun Zhao, Zhan Gong, Hong Zhu, Shaohua Wu..机构:IEIT Systems..原文链巴山夜雨算法工具链技术深度解析前沿技术2024-08-292024-08-2961
- LMDrive: 大语言模型加持的闭环端到端自动驾驶框架# 01 引言..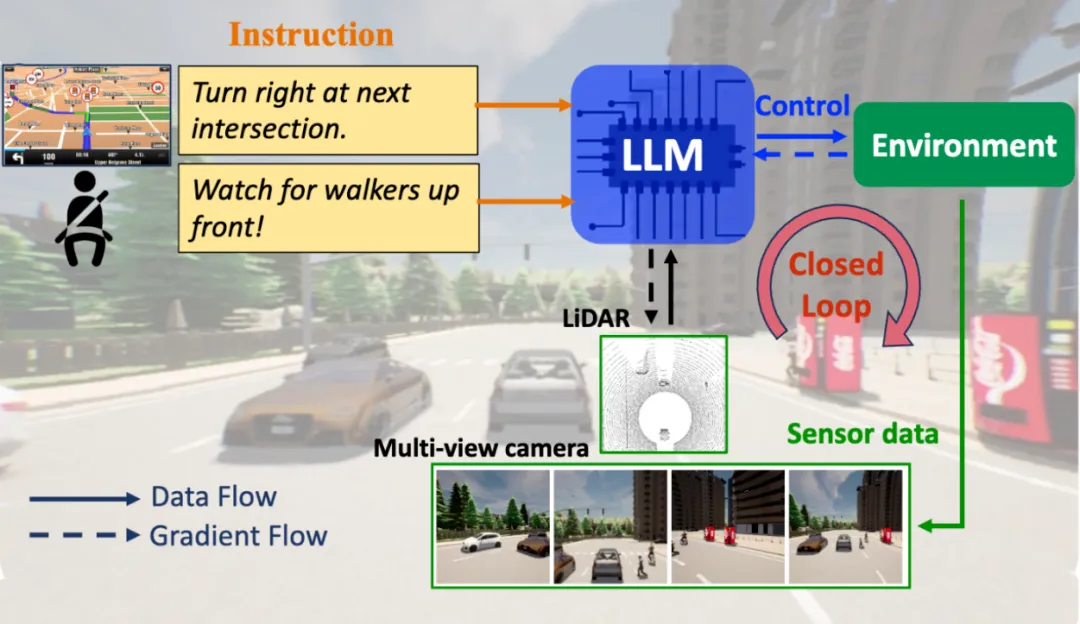.图1. LMDrive 框架功能概览图.*说明:LMDrive 接收语言指令和多模态多视角的传感器数据作为输入,并实时输出决巴山夜雨算法工具链技术深度解析前沿技术2024-08-282024-08-2893
- L3、大模型、还是舱驾一体?| 自动驾驶域控制器的来龙去脉(2024版)去年上海车展回来写了《自动驾驶域控制器的来龙去脉2023》,没想到这篇文章居然有四、五万的点击量,也从侧面说明智能驾驶行业确实非常火热。今年本来北京车展完了就要更新的,但囿于琐事一直拖更到现在,实在是抱歉。今年我们继续讨论域控以及三个行业趋势:L3、大模型和舱驾一体,最后我们再简单聊聊车路协同。....# #01 行业大势:快速出清、头部聚集...去年域控制器的方案可谓是百花齐放,我在写上一篇文巴山夜雨算法工具链技术深度解析前沿技术2024-08-282024-08-28134
- 一文带你了解到底什么是生成式人工智能!..# 原来这才是【生成式AI】!!..随着ChatGPT、文心一言等AI产品的火爆,生成式AI已经成为了大家茶余饭后热议的话题。..可是,为什么要在A
 HuangHui算法工具链技术深度解析前沿技术2024-08-282024-08-2855
HuangHui算法工具链技术深度解析前沿技术2024-08-282024-08-2855 - 地平线占用预测FlashOcc参考算法-V1.01. 简介.3D Occupancy Networks 的基本思路是将三维空间划分成体素网格,并对每个网格进行各类感知任务的预测。目前以网格为中心的方法能够预测每个网格单元的占用率、语义类别、未来运动位移和实例信息。3D occupancy 可以对道路障碍物进行更细粒度的划分,同时获取更精确的占用和语义信息。然而,三维体素表示的处理带来了巨大的内存和计算开销,导致当前占用率预测方法的部署受到限制。芯链情报局算法工具链技术深度解析征程6官方教程2024-08-272024-08-271428
- 天准科技 TADC-D52-域控FAQ_V1.0天准科技 TADC-D52-域控FAQ_V1.0 ,详见附件。
 HDR算法工具链官方教程2024-08-272024-08-27141
HDR算法工具链官方教程2024-08-272024-08-27141 - 自动驾驶架构进化史:端到端自动驾驶演变**前言:**2023年以来,在行业龙头特斯拉的标杆作用、大模型代表的AGI技术范式、以及自动驾驶拟人化和安全性需求的共同推动下,自动驾驶行业对于端到端的关注度一路升温。产业界、学术界和资本市场在端到端自动驾驶领域都有里程碑事件发生。...端到端自动驾驶已经成为明确的行业共识。...## 1、传统自动驾驶架构...传统的自动驾驶架构多衍生于机器人架构,因此,在机器人领域的感知-定位-规划三大模块及巴山夜雨算法工具链技术深度解析前沿技术2024-08-272024-08-2770