
本文详解 J6P/H 计算平台部署指南,分硬件、软件模块介绍,梳理官方推荐流程与实用工具特性,帮你快速理解并落地部署。



- yolov8_obb模型转换和部署# yolov8_obb模型转换和部署..## 1.yolov8_obb pth转换onnx.### 1.1将yolov8_obb pth转换onnx,并且设置opset=11..```.from ultralytics import YOLO. .# 加载模型.model = YOLO('runs/obb/train3/weights/best.pt') # 加载自己模型训练示例.model.
 J6标定问题感知规控技术深度解析2024-09-302024-09-30252
J6标定问题感知规控技术深度解析2024-09-302024-09-30252 - 自动泊车端到端算法ParkingE2E介绍自动泊车端到端算法ParkingE2E介绍一、算法介绍:自主泊车是智能驾驶领域中的一项关键任务。传统的泊车算法通常使用基于规则的方案来实现。然而,这些方法在复杂泊车场景中的有效性较低,因为算法设计复杂。相比之下,基于神经网络的方法往往比基于规则的方法更加直观和多功能。通过收集大量专家泊车轨迹数据,并通过基于学习的仿人策略方法,可以有效解决泊车任务。在本文中,我们采用模仿学习来执行从R
江城子
感知规控技术深度解析2024-09-302024-09-30381 - 【J6工具链性能分析与优化-2】模型性能优化建议1.引言为了应对低、中、高阶智驾场景,以及当前AI模型在工业界的应用趋势,地平线推出了J6系列芯片,如下:在软硬件架构方面,征程6不仅保持了对传统CNN网络的高效支持能力,还强化了对Transformer类型网络的支持,主要表现为大幅强化了对逐点计算、数据搬运的能力。基于J6硬件平台的增强和算法移植的痛点,同时坚持‘软硬协同’的设计理念,J6工具链衍生了诸多新特性。在【J6工具链性能分析与优化-1
 momo(社区版)算法工具链征程6技术深度解析社区征文官方教程2024-09-282024-09-28688
momo(社区版)算法工具链征程6技术深度解析社区征文官方教程2024-09-282024-09-28688 - 自动驾驶汽车空间变压器网络概览在拍摄一部电影时,我们自己能拍一镜到底吗,或者一个场景呢?几年前,我和我前女朋友在影院里观看了《La La Land》的开场场景--“Another Day of Sun ”这个开场的场景制作非常精良。长达 6 分钟的开场几乎没有 “剪辑”,是由一个不间断的镜头,场景从一个演员移动到另一个演员,从一辆车移动到另一辆车,并且所有镜头都是在高速公路上拍摄的。而这能顺利实现,是因为剪辑可以实现透视、缩放
 巴山夜雨算法工具链技术深度解析前沿技术2024-09-282024-09-2828
巴山夜雨算法工具链技术深度解析前沿技术2024-09-282024-09-2828 - 一种车载控制器 SWC 设计方法# 01 前 言..汽车软件 SWC(Software Component)的概念主要来源于 AUTOSAR(Automotive Open System Architecture)架构。. .在 Autosar 架构中,SWC是核心概念之一,代表了一个独立的、可重用的、自我描述的、可替换的软件单元。这些软件组件具有清晰的输入输出接口,相较于整个汽车电子系统来说,是一个更小的功巴山夜雨算法工具链技术深度解析前沿技术2024-09-272024-09-2738
- J6E display server实现和使用display server sample功能概述本文的demo为基于Wayland协议的Weston服务,使用DRM后端和Open GLES渲染后端进行图像合成和显示,此处主要介绍sample的使用方法。软件架构说明本文中Weston服务为开源的Weston 11.0.93版本,基于Wayland协议实现,通过libdrm实现显示控制,支持gl-render和pixman两种渲染后端。硬件数据流
费小财
算法工具链征程6技术深度解析社区征文官方教程2024-09-262024-09-2698 - J6E camera diag samplecamera diag sample功能概述本文的demo sample主要描述当前camera相关外设诊断的当前状态,并提供自定义实现的方法及使用说明。软件架构说明本sample基于现已实现的camera诊断架构,libcam内的外设诊断功能对外设硬件状态进行监测,并支持将故障状态发送给MCU处理,或通过事件回调方式通知应用处理。若打开诊断功能且使能诊断报告发送时,在libcam.so中会引用l算法工具链社区征文征程6技术深度解析官方教程2024-09-252024-09-25251
- 毫米波雷达基本原理毫米波 (mmWave) 是一类使用短波长电磁波的特殊雷达技术。雷达系统发射的电磁波信号被其发射路径上的物体阻挡继而会发生反射。通过捕捉反射的信号,雷达系统可以确定物体的距离、速度和角度。 毫米波雷达可发射波长为毫米量级的信号。在电磁频谱中,这种波长被视为短波长,也是该技术的优势之一。诚然,处理毫米波信号所需的系统组件(如天线)的尺寸确实很小。短波长的另一项优势是高准确度。工作频率为 76–81巴山夜雨硬件技术技术深度解析2024-09-242024-09-24132
- 自动驾驶端到端算法运行真的很稳定吗?那些Cornercase在端到端算法加持下要如何解决?一个高效的自动驾驶系统端到端需要在算法设计、数据质量、传感器性能和计算硬件等方面都达到较高的标准,才能在各种驾驶环境中表现出稳定性和可靠性。然而,在实际应用过程中,很多主机厂或算法供应商面对如火如荼的端到端算法即将铺开,广泛应用,还有亟待回答和解决的问题。本文将针对性的分析端到端算法的这些问题点及可能的解决方案。01 “端到端”VS“传统模块化”智驾方案,到底谁更优?有人认为,端到端的实现模式来看巴山夜雨算法工具链技术深度解析前沿技术2024-09-242024-09-2472
- J6 hb mem使用说明功能概述hbmem api使用说明,包括com buffer、graphic buffer、graphic buffer group、queue、pool、share pool的创建使用,多进程共享等。软件架构说明本文基于libhbmem API实现,调用libhbmem提供的API,实现不同buffer类型的内存申请和进程间共享。代码位置及目录结构 1. 代码位置:/test/samples/算法工具链征程6技术深度解析社区征文官方教程2024-09-232024-09-23334
- 【J6工具链性能分析与优化-1】编译器预估perf解读与性能分析1.引言地平线J6参考算法如何在编译后生成layer-details干货满满-J6工具链常用工具和API整理(含新手示例)在以上两篇文章中,笔者介绍了J6工具链如何生成编译器性能预估perf以及layerdetails的方法,在这篇文章中,我们将首先介绍layerdetails中的参数信息,然后将结合实例分析如何利用layerdetails来分析模型的性能瓶颈,进而对模型的性能进行优化。2.laymomo(社区版)算法工具链技术深度解析社区征文征程6官方教程2024-09-212024-09-21429
- J6上基于DEB工具实现包管理# 1. 引言.在开发、调测过程中,开发人员需要将系统软件、应用软件部署到Soc板端,以用于运行调试。传统的部署方式是通过解压复制或者调用部署脚本。这样的部署方式需要有着方式不统一、维护投入大的缺点。.在linux系统上,大多采用包管理的方式管理软件包,常见的包管理方式如上。相比于部署脚本的方式,使用统一的包管理工具有**规范和优化软件包的发布、管理流程,减少维护工作量、可溯源性高的优点**,适合
狗子别怕
算法工具链征程6社区征文技术深度解析官方教程2024-09-202024-09-20121 - 视觉 SLAM 算法的 6 个组成部分如果向朋友解释 “聊天-GPT”,你会怎么做?要讲的东西太多了,以至于很多人放弃了理解 LLM... 但是,如果我们不试图理解它,而是将其简化为以下 3 个想法呢?核心架构是变压器网络。它通过自我监督学习在整个互联网上进行训练,并可通过监督学习在数据集上进行微调核心任务是在循环中预测下一个单词或标记。这样我们就缩小了问题的范围,现在只需了解三件事: 变压器、自监督学习和下一个单词预测。在这之后,我巴山夜雨算法工具链技术深度解析前沿技术2024-09-192024-09-19114
- 【J6】NV12理论与代码详解# 1. 引言.使用地平线 J6算法工具链进行模型部署时,如果你的模型输入是图像格式,通常会遇到如下信息。.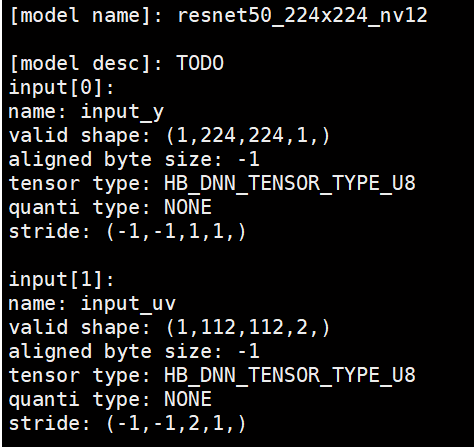..对于初学者,可能会存在一些疑问,比如:.
 no_name算法工具链征程6社区征文技术深度解析官方教程2024-09-182024-09-18433
no_name算法工具链征程6社区征文技术深度解析官方教程2024-09-182024-09-18433 - 智能车贾维斯诞生Hint-AD:使用人类语言的整体一致的可解释性端到端自动驾驶# 1.Abstract.自动驾驶 (AD) 中的端到端架构面临着解释性问题,阻碍了人类对AI的信任。人性化的自然语言已被用于驾驶解释和三维场景描述等任务。然而,之前的工作主要集中在声明性可解释性的范式上,自然语言解释并未基于AD系统的中间输出,这使得解释仅仅是声明性的。相比之下,对齐式可解释性则在语言和AD系统的中间输出之间建立了联系。本文提出了Hint-AD,这是一种整合了AD和语言系统的架构巴山夜雨算法工具链技术深度解析前沿技术2024-09-182024-09-1833
- 干货满满-J6工具链常用工具和API整理(含新手示例)1.引言J6工具链目前已经提供了比较丰富的集成化工具和接口来支持模型的移植和量化部署,本帖将整理常用的工具/接口以及使用示例来供大家参考,相信这篇文章会提升大家对J6工具链的使用理解以及效率。干货满满,欢迎访问2. hb_config_generatorhb_config_generator 是用于获取模型编译最简yaml配置文件、包含全部参数默认值的yaml配置文件的工具。使用示例:hb_conmomo(社区版)算法工具链社区征文征程6技术深度解析官方教程2024-09-162024-09-16521
- J6 的CFA pattern支持问题?CFA pattern:J6:RGGB/RCCB/RCCG/RYYCY J5:RGGB/RCCB/RCCG/RGBIR/RCCC如上,看到J5是支持RGB-IR CFA pattern的,J6上删除了,请问是基于什么考虑啊?看介绍RGB-IR很适合在低光下使用,是车载不需要吗?
阿白
算法工具链征程6前沿技术2024-09-122024-09-1237 - J6 C++模型推理快速上手代码解读# 1. 前言.在完成模型的转换编译后,会得到可以在开发板上部署的hbm模型,hbm(Horizon BPU Model)可以使用地平线推理库UCP( BPU SDK API)进行推理。.horizon_j6_open_explorer 发布物的 samples/ucp_tutorial/dnn/basic_samples/ 路径下有很多的示例,本文会使用samples/ucp_tutorial/no_name算法工具链社区征文官方教程技术深度解析2024-09-112024-09-11472
- 【J6工具链部署实用技巧-2】如何读取和修改模型的desc信息引言在上一篇文章中,我讲述了J6工具链中导出 qat.bc时修改输入输出名称和顺序的教程,其实在板端部署中,hbm模型的 desc信息也很重要。在板端部署工作中,用户可以将模型的版本、task 名称、roi坐标、bbox的scale等信息写进 desc中,然后使用ucp的hbDNNGetInputDesc、hbDNNGetOutputDesc、hbDNNGetModelDesc等接口获取到对应demomo(社区版)算法工具链征程6技术深度解析社区征文官方教程2024-09-102024-09-10273
- VIO(Visual Inertial Odometry) 的工作原理夏洛克 · 福尔摩斯蒙着眼睛坐在椅子上。突然,有人摘下他的兜帽,一个60多岁的男人托马斯爵士正坐在一个宏伟的办公室面对他。“福尔摩斯先生”那人开始说。“很抱歉这样叫你来。我相信你在哪里、我是谁,是个谜。”他自豪地开始说。小罗伯特·唐尼饰演的福尔摩斯沉默了一会儿,然后开始说:“至于我在哪里——我在查林十字和霍尔本之间迷失了一会儿。但路过藏红花山的面包店时得救了,因为这是唯一一家在面包上使用某种法国糖巴山夜雨算法工具链技术深度解析前沿技术2024-09-102024-09-10102