
本文详解 J6P/H 计算平台部署指南,分硬件、软件模块介绍,梳理官方推荐流程与实用工具特性,帮你快速理解并落地部署。



- 模块知识链接汇总【持续更新中...】.|模块|文章标题|链接|.|-|-|-|.|**HobotCV**|初识TROS.A 核心模块之HobotCV|[初识TROS.A 核心模块之HobotCV](https://developer.horizon.auto/developerForum?fullPath=/home/community/bbsdetail?bid=530294181755486208)|.|**HobotCV**|
 TROS.Assist算法工具链杂谈2024-03-192024-03-19462
TROS.Assist算法工具链杂谈2024-03-192024-03-19462 - 常见计算量,运算能力单位总结一,芯片处理器运算单位首先通常我们所见到的大写OPS是“ Operations Per Second”的缩写,表示每秒的操作次数。1TOPS代表处理器每秒钟可进行一万亿次(10^12)操作。我们常见的J5芯片,采用了全新一代的贝叶斯 (Bayes) 架构设计,可提供128TOPS的BPU算力,表示每秒峰值运算次数可达到128万亿次。与此对应的单位还有GOPS(Giga Operations Per
 kotei左文亮算法工具链征程5征程3技术深度解析杂谈2024-03-152024-03-15259
kotei左文亮算法工具链征程5征程3技术深度解析杂谈2024-03-152024-03-15259 - Message消息定义TROS.A 同时支持两种方式定义 Message。第一种 Message 需要按照下述章节自己实现消息及序列化类的定义。第二种 Message 支持用工具将 IDL 消息定义生成 C++ Message,简化了用户操作。..# 1. 第一种Message消息定义示例(用户自定义)..## 1.1 简介..为了使用 communication,必须定义 message 和对应序列化类。 用户的 mTROS.Assist算法工具链杂谈2024-03-142024-03-1491
- DDS简介## COM模块和DDS..### Communication模块..#### 简介..Communication作为通信总线,为应用屏蔽底层通信链路细节,提供统一的通信接口。支持多种通信模式、多个平台,使应用开发者能够快速搭建应用和解决方案。..是基于Linux内核v4l2框架实现的SoC的camera驱动框架。VIN框架的主要功能包括注册/注销、参数读取、与v4l2上层接口、与各device的下层接口、中断处理、buffer申请切换等。..VIN框架的模块包括sensor、actuator和flash等。sensor模块是各个sensor的器件层实现,包括上下电、初始化、各分TROS.Assist算法工具链杂谈2024-03-062024-03-06332
- dataflow的perfetto的工具使用# 1. 概述.dataflow 提供 perfetto 工具抓取框架内部关键路径的执行流程,并统一到同一时间轴,用户通过 perfetto 可以实现系统性能、数据流分析。perfetto 仅支持linux,j3,j5。.# 2. 使用方式.当前 perfetto 的配置组合后可以总结为以下三种方式:..- perfetto 为 system 模式并使用 perfetto 命令行工具启动 tracTROS.Assist算法工具链杂谈2024-03-052024-03-0574
- 定时调度器## 1. 功能说明.定时调度器主要用于定时执行周期性任务。 用户可以配置如下选项:..- 任务执行周期(默认单位ms,也可以配置成ns)..- 用户期望所要执行的函数..- 设置周期任务执行次数(-1表示一直执行到timer被取消)..- 指定定时任务时钟类型,包括稳态时钟/系统时钟/模拟时钟。..- 任务触发类型,包括DefaultTrigger/SelfTrigger,两种触发类型在周期任务TROS.Assist算法工具链杂谈2024-02-282024-02-2875
- Node应用编程接口## 1. Node.DataFlow将一个功能模块抽象为Node,理论上每个Node实现一个功能,每个Node具体的功能由用户自定义扩展。用户可以根据需要扩展Node,在其内部创建Publisher、Subscriber等对象,用于Node间的通信。..- a sTROS.Assist算法工具链杂谈2024-02-272024-02-2770
- 使用communication sample解析地平线6V感知结果。TROS的SDK提供了开发案例,会介绍中间件示例工程的功能、编译及运行方法,以帮助用户快速上手中间件开发。其中,communication示例位于SDK的TROS-SDK-1.3.4/samples/component_samples/communication_ex目录,sample示例对外展示如何使用地平线communication中间件进行数据得pub sub。.使用communicatioTROS.Assist算法工具链杂谈2024-02-232024-02-2397
- E2E保护机制说明与示例## 概述.E2E(End to End,端到端)实现数据从发送端到接收端的保护和校验。实现CRC校验(检查数据收发的一致性)和rolling counter机制(可以检查数据的丢包,重复和乱序问题)。communication支持E2E保护的协议包括zmq(tcp, ipc, epgm), shm(cpu shm, hbmem), pcie。其中对zmq相关协议保护序列化后的meta和data部TROS.Assist算法工具链杂谈2024-02-222024-02-2269
- Windows开发环境搭建参考:TogetheROS.Auto 用户指南-》安装指南-》搭建Windows开发环境.## 1. 环境要求.- Windows 10 x86_64操作系统.- CMake 3.15+ (版本不要用太新).- Python 3.8+.- Conan 1.50+(需小于2.0版本).- Visual Studio 2015 MSVC编译器.## 2. 安装.### 2.1 安装CMakeTROS.Assist算法工具链杂谈2024-02-222024-02-2284
- mainboard框架配置文件详细介绍### 1. 配置文件..mainboard2启动依赖一些配置文件, 一般配置文件的目录组织形式如下, 用户也可根据需求自行定目录组织。..```.config.├── global_user_config.json.├── process.json.├── runtime_context.json.├── schedule.json.├── communication.json.├── caseTROS.Assist算法工具链征程5杂谈2024-02-062024-02-0687
- 以obstacle为例说明Frame数据结构### Pack frame..communication 发送的Msgs分为大消息和小消息,小消息是单个topic,Obstatcle就是单个topic,大消息可以视作一连串小消息的集合,也就是下面打印的obstacle、odometry、laneline_v2等topic的集合,组成一起就是一帧数据(Frame)。帧构成:一帧中包含一个 meta 和多个data,total\_data\_leTROS.Assist算法工具链杂谈2024-01-312024-01-3187
- 通过onnx组件编辑调整onnx模型1. ONNX介绍ONNX是一种文件格式,其针对机器学习所设计的,用于存储训练好的模型。他是开放式的,所有的深度学习框架都可以自由使用,这使得不同的深度学习框架(如Pytorch, MXNet)可以采用相同格式存储模型数据。简而言之,ONNX是一种便于在各个主流深度学习框架中迁移模型的中间表达格式。2. ONNX构成(底层实现)ONNX 在底层是用 Protobuf 定义的。Protobuf,全称
 HuangHui算法工具链征程3征程5杂谈2024-01-302024-01-30121
HuangHui算法工具链征程3征程5杂谈2024-01-302024-01-30121 - Odometry的数据回灌### 1. canraw数据回灌..canraw数据是传递给vehicleio的数据,其传入关系如下:.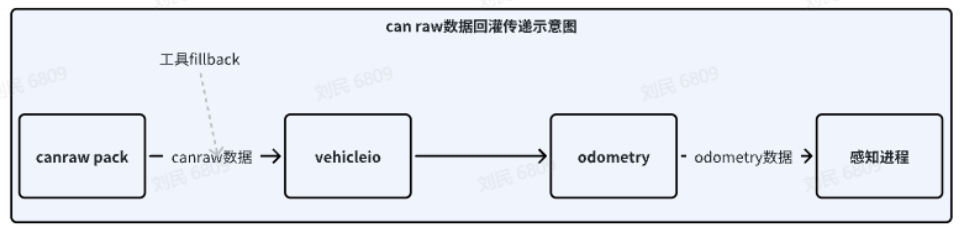..### 2. PACK数据回灌到VehiclTROS.Assist算法工具链杂谈2024-01-302024-01-30109
- Dataflow module应用编程接口sampleModule 中内置了 DF\_MSG\_TIMER\_PROC 类型的 proc ,用户可以配置 Proc 执行的周期、次数。下面将介绍 DF\_MSG\_TIMER\_PROC 类型的proc如何定义以及使用。..### 1. 定义消息..首先定义proto格式的 msg.boleidl 文件如下:..```.syntax = "proto3";.package dataflow\_test\TROS.Assist算法工具链杂谈2024-01-302024-01-30100
- HOBOTCV框架使用实例之LKOF# LKOF 示例..## 1. 概述..LKOF用于基于金字塔的光流计算,依赖J5硬核算子,仅J5平台支持,定位为hobotcv框架下的一个operator。..## 2. 示例程序..### 2.1 代码流程..- 加载lkof plugin. . ```c++. auto framework = CVFramework::Instance();. . IPluginManagerTROS.Assist感知2024-01-262024-01-2675
- HOBOTCV框架使用实例之IPM# IPM 示例..## 1. 概述..IPM用于图像的重映射,可以用于畸变矫正,坐标转换,定位为hobotcv框架下的一个operator。.目前IPM在j3、j5平台依托于Gdc Device,linux平台依托于cpu实现其算子能力。..## 2. 示例程序..### 2.1 代码流程..- 加载gdc plugin. . ```c++. auto framework = CVFramTROS.Assist算法工具链杂谈2024-01-262024-01-2691
- communication模块开发之Sevice Client模式示例## COM模块开发之应用示例..之前已经简单介绍了COM模块的框架以及COM模块支持的通讯模式有:Pub/Sub模式,Service/Client模式。上篇文章简单介绍了Pub/Sub通信模式以及Pub/Sub具体的示例,这次我们来了解一下Service/Client通信模式,以及通过具体的示例来了解一下工作模式。..### Service/Client模式..Service/Client模式是TROS.Assist算法工具链杂谈2024-01-252024-01-25101